超近程雷达高速目标运动补偿方法
2013-04-25李慧敏于迎春
马 可,李慧敏,于迎春,李 斌
(西安电子工程研究所 人力资源部硕士点,陕西 西安710100)
连续波雷达[1]具有峰值功率低、时宽带宽积大、测距测速精度高、低截获概率、无近距离盲区、体积小易实现等优点,因此经常被应用于超近程雷达中。在利用连续波雷达对超近程高速目标进行探测时,会出现距离速度耦合以及目标在驻留时间内跨越距离单元的问题。
文献[2]采用对称三角线性调频连续波(LFMCW)信号形式进行近距离探测,通过利用上下扫频段多普勒频移的对称性实现运动目标距离速度去耦合。文献[3]提出了一种基于二次混频估计LFMCW信号参数的方法,该方法消除了多普勒效应对运动目标检测的影响。文献[4]提出了利用单载波频率连续波(CW)与LFMCW信号相结合的方法对近距离目标进行检测。但文献[2~4]均没有考虑高速目标在驻留时间内跨越距离单元现象对运动目标检测带来的影响。文献[5]针对高速目标检测问题提出了一种二次混频与MTD处理相结合的方法,该方法根据上下调频差拍信号对称的特点,采用二次混频处理解决多周期信号中心频率偏移问题,同时实现了距离多普勒解耦合。但其采用的对称三角LFMCW信号形式在超近程高速目标探测中有自身缺陷。文献[6]根据超近程高速目标的特殊应用环境,说明了对称三角LFMCW信号形式的缺陷,提出了CW与LFMCW信号组合形式,并分析了其在超近程高速目标探测中的优点,但其未考虑在驻留时间内目标跨越距离单元的问题。
文中采用一种CW与LFMCW信号的组合形式,通过CW差拍信号获得目标无模糊的多普勒频率估计,再构造运动补偿信号对LFMCW差拍信号进行运动补偿,进而可以得到目标的距离信息。这种针对高速目标的运动补偿方法既可以解决距离速度耦合的问题,也可以解决高速目标跨越距离单元的问题。
1 信号多周期模型分析
由于探测高速目标需要在更远处发现目标,而远处回波信号强度较弱,单周期信号处理已经不能达到可靠检测所需的输出信噪比。通过增加信号驻留时间进行多周期积累以提高信号能量,因此高速目标回波需要分析信号的多周期模型。
CW与LFMCW信号组合形式如图1所示,信号周期为Tr,每个周期内CW与LFMCW信号的时长分别为T,则Tr=2T。设CW与LFMCW信号在第m个周期内的发射信号分别为
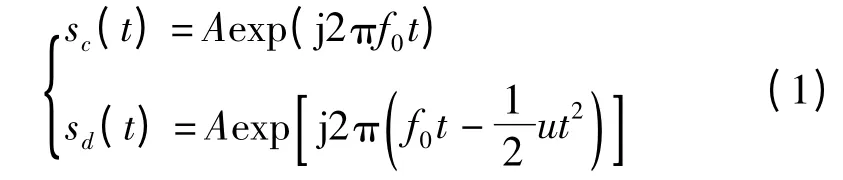
其中,A为发射信号幅度;f0为工作频率;u=B/T为LFMCW调频斜率;B为调频带宽。
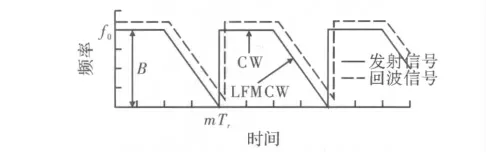
图1 CW与LFMCW信号组合形式
忽略目标反射引起的相移,可以得到CW与LFMCW回波信号分别为
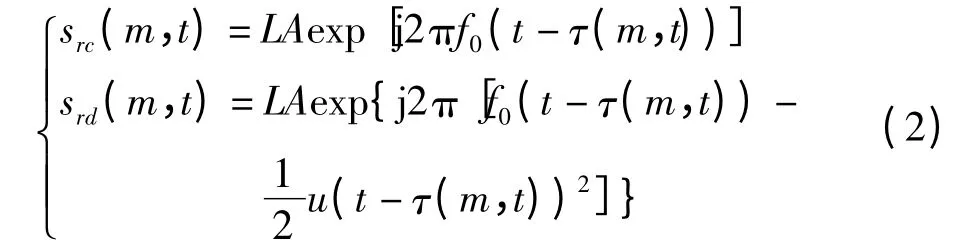
其中,L为目标反射系数;m为在第m个周期内;τ(m,t)=2R(t)/c=τ0-k(t+mTr)为目标回波延时,τ0=2R0/c,k=fd/f0;fd为目标多普勒频率;R0为目标初始距离;v为目标速度。
回波信号与发射信号混频,经过低通滤波后得到的差拍信号分别为
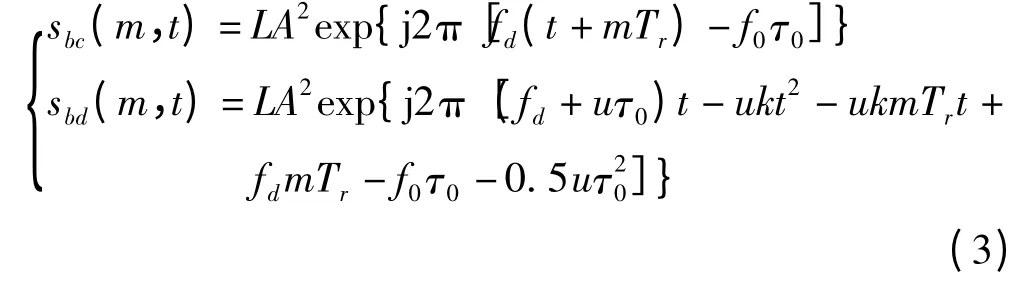
由式(3)可以看出CW差拍信号为一单频信号,其频率为fd。对CW差拍信号进行功率谱估计可以直接得到目标无模糊的多普勒信息。LFMCW差拍信号的中心频率为目标初始距离与速度的耦合项。且有随周期变化的项(-ukmTrt),该项就是运动目标在积累周期内所产生的频移。
运动目标在积累M个周期内不发生跨越距离单元现象的限制条件为vMTr<δR,其中,δR为距离分辨率。那么当运动目标的速度>vmax=c/2BMTr时,需要对积累的回波信号进行运动补偿。
2 运动补偿方法
当运动目标速度>vmax时,LFMCW差拍信号在积累时间内会发生跨越距离单元现象,这将导致差拍信号的能量不能在同一个距离单元内积累,使得在积累周期内的处理无法满足可靠检测的输出信噪比要求。这时就需要对LFMCW差拍信号进行运动补偿。注意到式(3),通过CW差拍信号估计出目标的多普勒频率d,进而构造出随周期变化的补偿信号

将式(4)与式(3)中LFMCW差拍信号相乘得

对比式(3)可以看出,式(5)消除了目标距离速度耦合项和多周期积累的频率偏移项。其信号的频率只与目标初始距离有关,是一单频信号。实现了距离速度解耦合和运动补偿。这样对式(5)做FFT运算就可以实现信号的多周期积累,得到目标的初始距离。再通过计算可以解得目标当前距离。
在计算目标的多普勒频率时可采用文献[7]中介绍的CZT方法来提高精度。针对本文提出的CW与LFMCW信号组合形式,可以总结出高速目标补偿处理的步骤:(1)对CW差拍信号做FFT/CZT得到目标的多普勒估计。(2)构造出随周期变化的补偿信号。(3)将补偿信号与LFMCW差拍信号相乘得到新的单频信号。(4)将此单频信号做FFT即可得到目标的初始距离估计。(5)通过目标初始距离和速度解出目标当前距离。
3 仿真结果
为验证上述方法的可行性,以某毫米波超近程探测雷达为例进行仿真。雷达系统参数为:载频f0=35 GHz,CW与LFMCW信号时长均为T=0.5 ms,组合周期Tr=2T,调频带宽B=500 MHz,系统采样频率fs=4 MHz。假定输入噪声为高斯白噪声,信噪比SNR=-25 dB。
首先假设一个距离R=200 m的低速目标,以验证在低输入信噪比条件下通过积累能够可靠检测出目标。针对低速目标只分析LFMCW差拍信号的功率谱。图2(a)为单周期信号功率谱,可知,由于远处回波强度较弱,单周期信号的差拍信号信噪比过低,不能检测出目标;图2(b)为积累8周期的差拍信号功率谱。可以看到积累8周期的差拍信号功率谱有明显谱峰,可检测出目标。
按照上述参数,再对一个初始距离为R=200 m,速度为v=900 m/s向雷达飞行的目标进行探测。对CW和LFMCW信号均做8周期积累。目标跨越距离单元情况如图3所示,图中距离谱峰值位置代表目标当前周期内所处的距离单元,可见目标在8周期积累内跨越了多个距离单元。跨越距离单元将使得LFMCW差拍信号能量无法积累,导致目标不能被可靠检测,故需要对目标进行运动补偿。
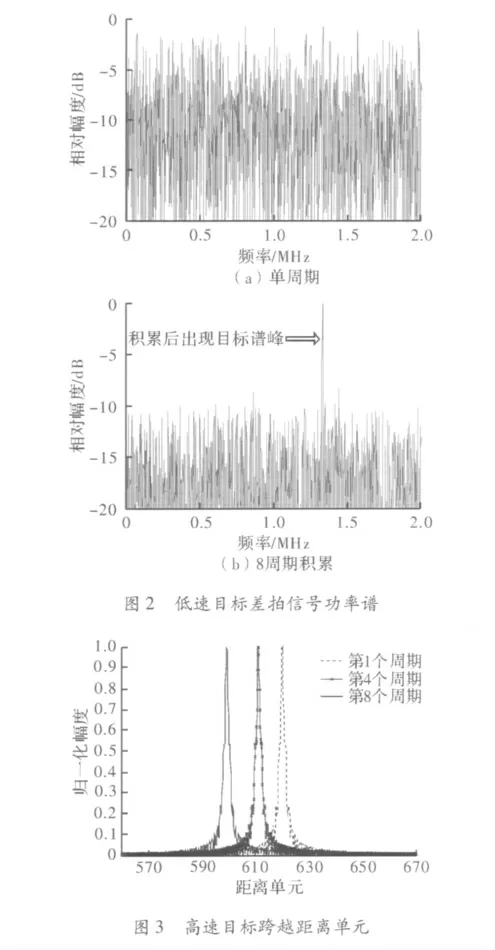
图4(a)为CW差拍信号积累8周期后的功率谱。可以看到,CW差拍信号做8周期积累后有明显的谱峰,可以精确估计出目标的多普勒频率。图4(b)为LFMCW差拍信号积累8周期后不做运动补偿的功率谱,可见未经补偿的LFMCW差拍信号功率谱没有明显谱峰,不能检测出目标。应用式(4)由CW差拍信号估计的多普勒频率构造出相应的补偿信号来补偿LFMCW差拍信号。经过运动补偿后的差拍信号功率谱如图4(c)所示。可以看出,补偿后的LFMCW差拍信号有明显谱峰,可以检测出目标,进而可以得到目标的初始距离。
4 结束语
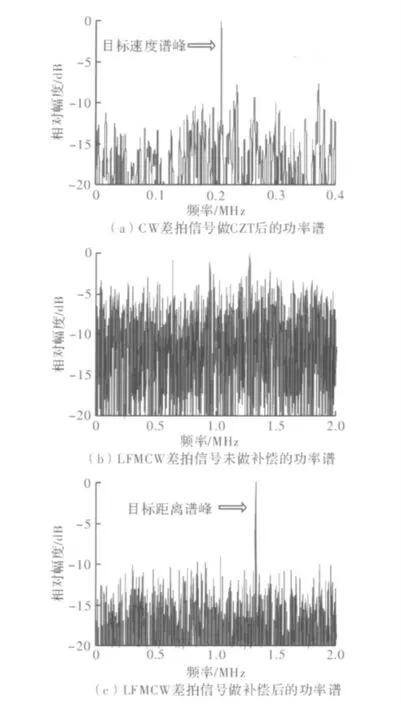
图4 运动目标差拍信号功率谱
在超近程雷达高速目标探测中,存在距离速度耦合问题和驻留时间内目标跨越距离单元的问题。文中采用一种CW+LFMCW信号组合形式作为探测信号,由CW差拍信号获得目标无模糊的多普勒信息,再构造补偿信号与LFMCW差拍信号相乘,得到经运动补偿的差拍信号,进而可以估计出目标的距离信息。仿真结果表明了这种方法有效地解决了距离速度耦合的问题和高速目标跨越距离单元的问题。
[1]MERRILL I S.雷达手册[M].2版.王军,译.北京:电子工业出版社,2003.
[2] 杨建宇,凌太兵,贺峻.LFMCW雷达运动目标检测与距离速度去耦合[J].电子与信息学报,2004,26(2):169-173.
[3] 刘贵喜,凌文杰.LFMCW雷达密集运动目标检测[J].红外与毫米波学报,2005,24(1):76-80.
[4] 丁顺宝,刘明.一种LFMCW雷达多目标距离-速度配对新方法[J].现代雷达,2011,33(5):9-11.
[5] 肖慧,胡卫东,郁文贤.LFMCW雷达高速运动目标检测与估计[J].信号处理,2007,23(6):829-832.
[6] 马可,李慧敏,李斌.近程高速目标探测的连续波雷达信号分析[C].青岛:第十二届全国雷达学术年会论文集,2012:1004-1007.
[7] 陈祝明,丁义元,向敬成.采用Chirp-Z变换提高LFMCW雷达的测距离精度[J].信号处理,2002,18(2):110-112.
