基于模糊-PI控制的无功补偿技术在矿井提升系统中的应用
2013-04-24唐朝晖杨赛强桂卫华
刘 晖,唐朝晖,杨赛强,肖 津,桂卫华
(1.深圳市中金岭南有色金属股份有限公司凡口铅锌矿,广东韶关512325;2.中南大学信息科学与工程学院,湖南长沙410083)
随着国民经济的发展和现代科学技术的进步, 电网负荷不断增大。由于非线性负荷的不断增加,使得电网电压波形畸变、功率因素降低,特别是采矿企业中广泛使用的提升机对电网产生的无功冲击影响越来越大,对于无功补偿的需求与日俱增。由于矿井提升系统主要用电设备为感性负荷,运行过程中不仅吸收有功功率,而且需要从电网吸收大量的无功功率,导致功率因素降低,其整流器中的非线性电力电子器件产生了大量的谐波电流使电网受到谐波的污染。这些不良影响造成矿井提升供电系统的中性线过载、电容器组谐振、熔断器误动、电子继电器失效和通信设备的干扰等。
我国工矿企业现阶段的谐波主要由直流电机采用的晶闸管整流器产生的。由于直流拖动优良的调速性能和控制性能,国内工矿企业一般都采用交流电机-直流电机(G-D)模式,随着现代采矿企业生产能力的不断提高,国家对于节能减排的重视,这种方式对供用电系统所带来的不良影响也愈发显现。文中以国内某大型有色金属矿山作为研究对象,对其矿井提升供电系统的特性进行深入分析,采用SVC中的TCR(晶闸管控制电抗器)类型对其进行相应的无功补偿,设置的11次、13次电容器组滤波支路能够对12脉冲整流器产生的特征次谐波进行滤波[1]。针对矿井提升机这一典型的冲击性负荷,通过分析各类型无功补偿方式的结构和特点,结合矿井提升系统的电路结构、系统参数及运行特性等确定了TCR+FC型SVC无功补偿方案[2]。针对矿井提升电机和整流装置的特点,以模糊-PI双模控制算法[3-4]对SVC无功补偿装置进行控制[5],使用MATLAB的Simulink[6]工具箱进行建模和仿真,对无功补偿装置的工程应用效益和前景进行综合分析。
1 无功补偿方式的分类及特点分析
无功补偿方式[7]按照接线的不同通常可分为并联补偿和串联补偿两大类。其中,并联补偿主要利用电容器和电抗器并联接入系统进行无功补偿,其接线简单,操作方便,对系统的可靠性影响较小;而串联补偿主要是利用电容器和电抗器串联入系统进行补偿,其接线比较复杂,操作不方便,对系统可靠性的影响大。这两种方式都是传统的静态无功补偿装置,即补偿装置的补偿容量是固定的,不能根据电力系统无功补偿容量的变化而变化。
补偿容量不固定,能够跟踪系统补偿容量的变化而动态变化的无功功率补偿装置称为动态无功补偿装置。动态无功补偿装置按照其是否拥有运动部件又可以分成静止型无功补偿装置和运动型无功补偿装置。运动型无功补偿装置因为拥有旋转部件而得名,同步电机(又称为同步调相机)空载运行,专门向电网输送无功功率,但是由于其有功损耗大且维护复杂,在中小功率的民用和工业现场已很少使用;静止无功功率补偿装置(SVC)没有旋转部件,利用电力电子器件与储能元件构成,主要有静止 无 功 功 率 补 偿 器 (TCR,TSC,TSR,TCT,CR等),其显著特点在于快速、平滑地调节容性和感性无功功率,实现动态补偿。对于常见的无功装置,其主要类型和分类如图1所示。
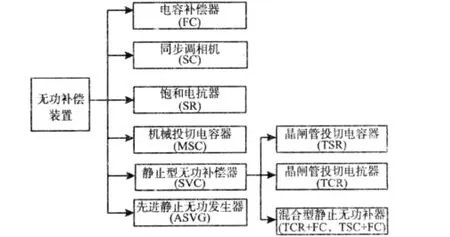
图1 无功补偿方式分类Fig.1 Classification of reactive powercom pensation mode
2 矿井提升机供电系统分析
该矿井提升系统的直流提升机所采用的是串联型的双桥顺序控制变流器,整流器的类型为12脉冲,这是现阶段我国工矿企业中应用最广的整流器类型之一。在12脉冲整流器的基础上通常还可以组合成24,36脉冲等多种类型的整流器,同样都能以12脉冲整流器为基础进行相应分析。整流器中的非线性电力电子器件会造成电压、电流波形畸变。提升机运行过程十分复杂,其直流电机在一个运行周期内要经历加速、稳定运行、减速停机等过程,在其运行期间负荷相对不恒定,致使电机效率和功率因素普遍偏低。
该矿区的电力均来自于110 kV主变电站,其变电站的主变压器容量为22 000 kVA。主变压器将电压由110 kV降为6 kV,通过各条输电线路向各矿区用户进行供电。矿井6 kV母线下提升系统的供电系统结构如图2所示。
12脉冲整流是指在原有的6脉冲整流基础上,在输入端口增加移相变压器后再增加另一组6脉冲整流器,直流母线电流则由12个晶闸管组成的全控型整流电路整流得到。尽管采用12脉冲整流器能在在很大程度上降低次谐波的含量,但在提升机运行中产生的11,13次特征谐波含量仍然大大超过国家标准。采用12脉冲以上的多相整流电路,可以提高功率因数,有效减少谐波的干扰,但由于其结构十分复杂,投资成本大,后期维护更加困难,我国的工矿企业往往不采用这种整流方式。所以,采取无功补偿并加装相应的滤波设备更加具有实际意义。

图2 矿井提升机供电系统Fig.2 Power supply system of mine hoist
直流提升电机电枢由两个6脉冲整流器供电,变压器两个副边联结组分别相差30°,联结类型分别为Δ,Y型,两个三相桥式整流器输出12脉波头的电流。矿井提升机所用的12脉冲整流器电路原理如图3所示。
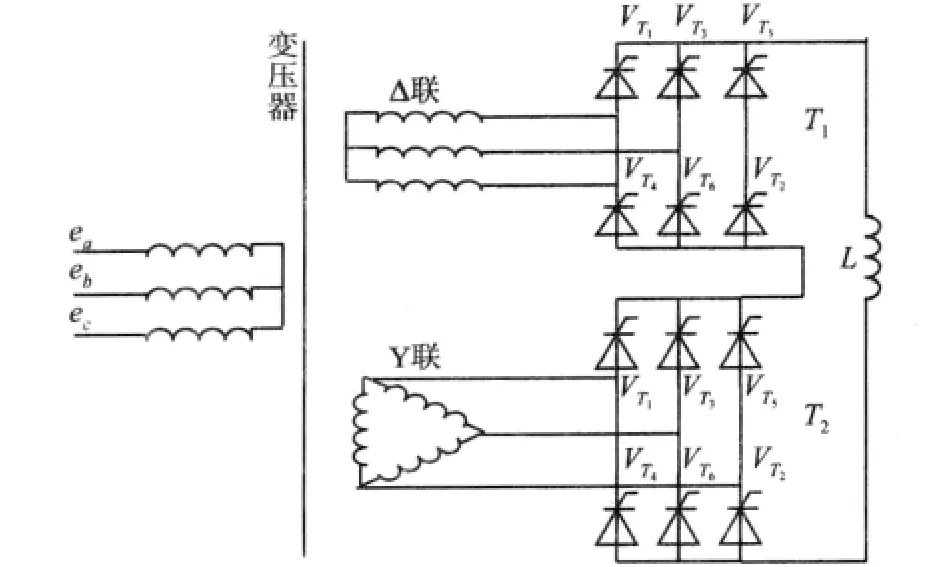
图3 矿井提升系统12脉冲整流器原理Fig.3 Principle diagram of the mine hoisting system 12 pulse rectifier
由图3可知,对整流桥T1网侧电流进行傅立叶级数展开后为

整流桥T2网侧线电压比整流桥T1网侧线电压超前30°角,故其网侧线电流比桥T1侧超前30°角,将桥T1网侧电流进行傅立叶级数展开后可得:
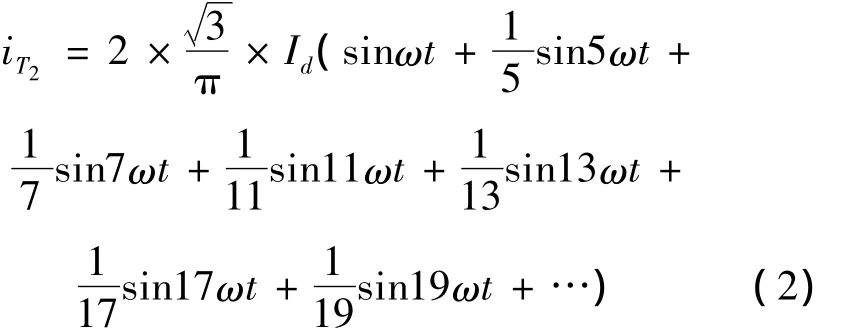
将整流桥T1,T2网侧电流合成即可得到12脉冲整流电路的电流输出,其值为
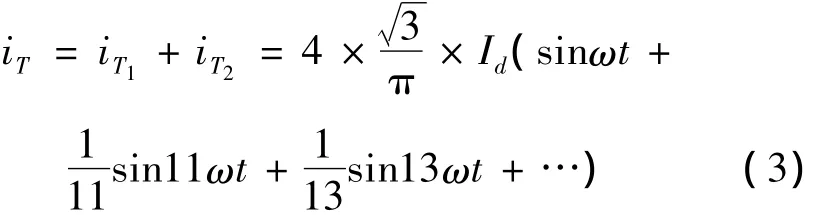
由式(3)可知:相比6脉冲的整流器12脉冲整流器的整流桥 T1,T2输出5,7,17,19 次谐波电流互相抵消,则其输出只含有11,13,23,25等各次谐波,即12K±1(其中K为正整数)。在矿井中采用该类型的整流器能从一定程度上消除特定次的谐波分量,提高功率因素。但是12脉冲的整流器的特征次谐波分量仍然大大超过电网谐波国家标准,其中11次和13次谐波分量尤其明显。因此,12脉冲整流器在大功率应用场合必须加谐波滤波装置以消除谐波对电网的影响。
3 TCR+FC型SVC系统基本原理
SVC包括两部分:即TCR相控支路和FC滤波支路(见图4)。TCR(晶闸管控制电抗器)型的SVC无功补偿装置将反向并联的晶闸管与电抗器进行串联,利用触发装置控制晶闸管的触发角度从而调节流过电抗器中的电流,实现实时、动态感性的无功功率调节,改善电力系统的功率因数提高供电系统的稳定性。

图4 TCR补偿原理Fig.4 Principle diagram of TCRcom pensation
TCR控制系统通过采集供电系统母线处的电压u、电流i,利用无功功率和谐波检测算法实时计算出系统三相电压、电流、无功功率、有功功率等参数[8],根据系统各项电能指标综合计算出晶闸管的触发角度α,改变触发角度即可改变相控电抗器中电流的大小,由于触发角度理论上可以在(90°,180°)之间进行连续调节,所以无功补偿系统向外输出的无功功率可以实现平滑无级的调节。系统负载的无功功率为QL,设置的滤波电容器组可输出容性无功功率为QC,TCR支路输出的无功功率为QT,则系统负载的无功功率QL可以由QC,QT共同维持。使得QL,QT两者之和维持不变,这个感性无功功率为一个常数可以被设置的FC滤波器组所产生的容性无功功率QC抵消,即QF=QL+QT,从而使系统的有功功率达到最大。将供电系统母线处的功率因数始终维持在0.95~0.99的范围内,使三相母线电压维持一个恒定值并且使电网电压的波动尽量小。
在正常运行情况下,晶闸管触发角在可调范围之间,而不在两个极端情况下(α=90°全导通或α=180°全关断),因此TCR在运行过程中必然会由于晶闸管的开断而产生大量谐波,由上面的分析可知:当α>90°时,电抗器中的电流波形不再是纯正弦波形,对其进行傅立叶分解可知其电流中含有大量的奇数次谐波,为了防止这些谐波注入电网而对电网的正常运行造成影响,需要采取相应的措施。为了防止3次及3的倍数次谐波对交流系统造成不良影响,通常将三相TCR按照三角形连接,如果各相参数一致,三相平衡,此接法将使这类谐波经过三相电感环流而不注入交流系统。
4 SVC模糊控制系统设计
大多数电力系统都是一个非线性系统,常规的线性控制器在提高电力系统稳定性上效果不佳,因而需要研究非线性控制器的控制效果。由于控制系统的准确数学模型难已获得,可利用传统的PID控制作为基础结构组成模糊PID控制器,模糊控制器的非线性特征有利于提高系统鲁棒性,它们包含非线性要素而且结构相对简单,因此这些经过改进的控制器广泛应用于电力系统。
4.1 模糊-PI双模控制器原理
当系统电压、无功功率变化较大时采用模糊控制器,可以使系统的无功功率得到快速补偿,尽可能减少系统的不稳定性,以获得较好的鲁棒性。当系统电压以及无功功率变化幅度较小时,将其切换到传统的PI控制,这样可以对系统无功功率进行快速补偿并稳定电压。设基准值与反馈值的标准误差为λ0、系统误差为λ,当λ >λ0时系统执行模糊控制模式,当λ<λ0时系统进行PI控制模式。模糊-PI双模控制器的系统结构框架如图5所示。
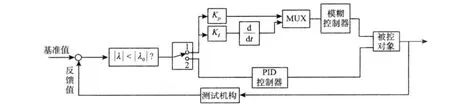
图5 模糊-PI双模控制结构框架Fig.5 Fuzzy-PI dualmode control structure diagram
设计SVC无功补偿装置的目标是为了改善电压质量,并根据系统对无功的需求实时跟踪补偿。在这个过程中还要充分保证系统的稳定性,确保不会由于电压和无功的频繁变动而导致系统振荡失调。根据矿井提升系统的实际补偿需求将控制器设计为两个输入一个输出,输入变量分别为系统电压偏差eu以及无功功率偏差eq,输出变量控制电抗器的输出为ytcr,即依靠调整晶闸管的触发角度调节电抗器的电流大小。将模糊变量的输入和输出分别设置为19个等级,其相应的取值范围为{-9,-8,-7,-6,-5,…,5,6,7,8,9}设输入变量eu的变化区间为(m1,n1),eq的变化范围为(m2,n2),将其分别转化至区间(-6,6)。由此可知其比例因子分别为


设输入变量eu,eq与输出变量y的模糊子集为(NB,NM,NS,Z,PS,PM,PB),其中糊糊子集内元素的意义对于电压偏差用语言描述为:极高、很高、偏高、正好、偏低、很低、极低;对于无功偏差则为:极多、很多、偏多、正好、偏少、很少、极少。
由于提升系统的母线电压等级为6 kV,母线电压允许的波动范围为 ±2%,其偏差允许范围为-0.12 ~0.12 kV母线电压的波动范围为5.88 ~6.12 kV。系统设计的模糊论域范围为-9~9,无功补偿的信号采集来源于母线端的电压互感器,其标准电压值为100 V,故可得到量化因子Ku=0.75。根据测试和计算得到其系统的最大无功波动为Qmax=2.17 MVA,同理可得其量化因子 Kq=4.1。
4.2 模糊控制器隶属度函数
对于隶属度函数的选取并没有严格统一的标准,但在选取的过程中应该满足两个最基本的条件:①选取的隶属度函数能够满足控制需求;②使工程实际应用能够尽可能简化计算过程和难度。根据上述标准结合矿井提升系统无功补偿装置所应该满足的指标,选取三角形函数作为该模糊控制器的隶属度函数。
电压偏差量以及无功功率偏差的隶属度函数如图6所示。
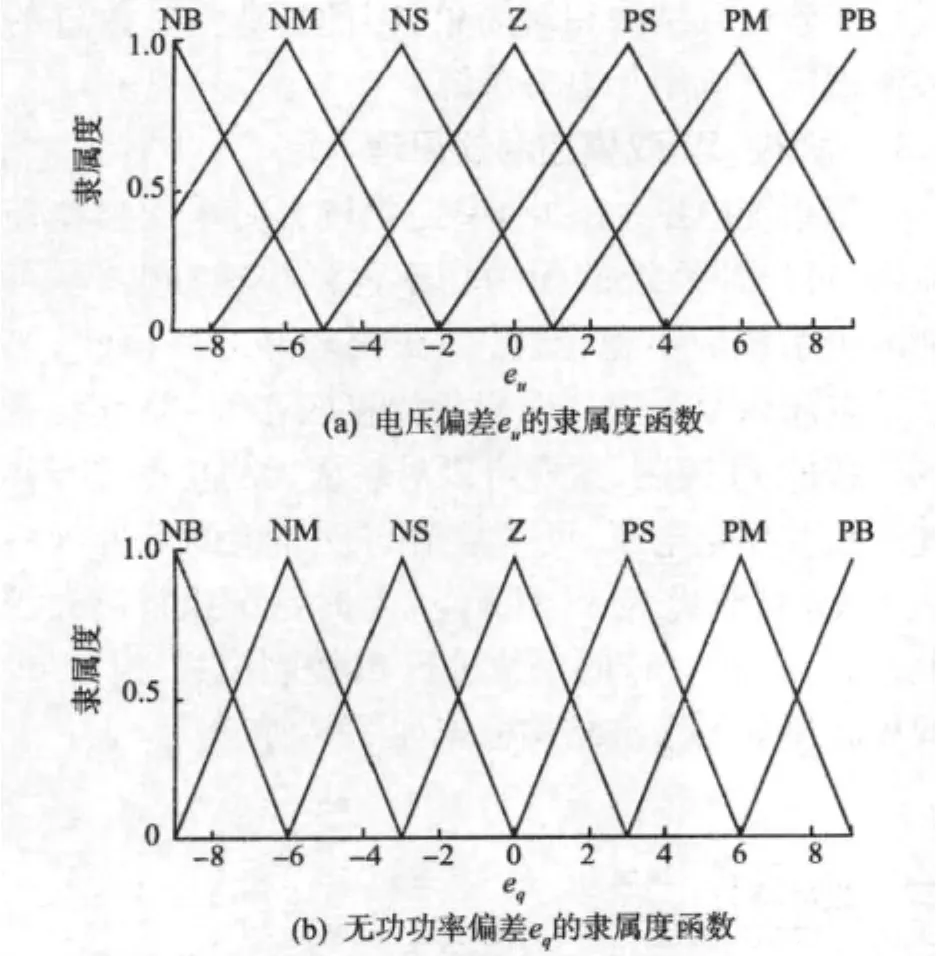
图6 电电压偏差量和无功功率偏差的隶属度函数Fig.6 Membership function of voltage deviation and reactive power deviation
设置TCR支路的无功输出ytcr为系统的输出控制目标,可以通过控制其晶闸管触发角度α得以实现。由此可得如图7所示的输出ytcr的隶属度函数。
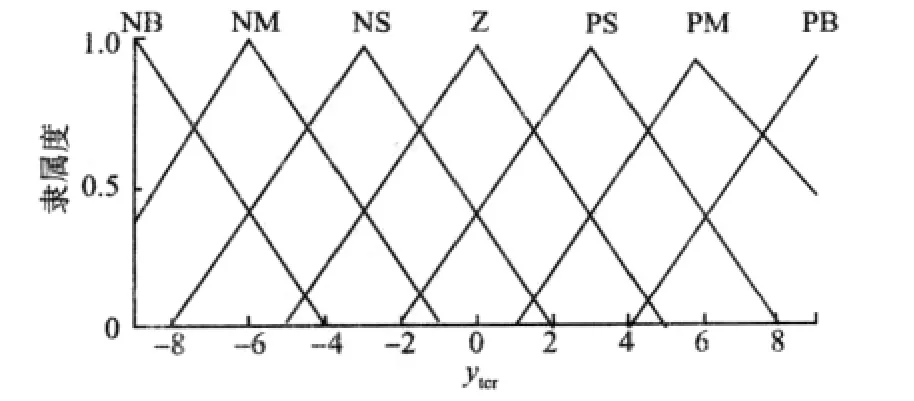
图7 输出y tcr的隶属度函数Fig.7 Membership function of outputytcr
4.3 模糊推理规则及控制器输入
模糊推理的规则通常是依据专家经验以及现场的经验数据加以分析和总结形成模糊集合。根据模糊控制器的输入输出结构特点(两个输入一个输出)可确定语言推理模式:IF euAND eqTHEN ytcr。由于无功功率与三相母线电压存在一定的关系,如果系统无功功率不足会导致三相母线的电压值降低,波动性增大,而无功过剩则会使供电系统末端的电压升高。首先考虑电压误差为负极大值而无功功率的误差为负的极大值时,无功功率和电压的误差值均有增大的趋势。为了尽快消除已有的无功误差同时稳定母线电压,TCR支路的控制量取负的中值。当电压偏差为负的极大值而无功偏差为负的中值时,同样取TCR支路的控制量为负的中值。当电压误差为负大而无功误差变化为0时,为消除误差选取TCR支路控制量为正小值。当电压误差为负而无功误差为正时,系统本身的无功偏差已有减小的趋势,所以,为尽快消除误差和超调,应取TCR支路为正的较小控制量。同理可得其他相应的控制规则。结合矿井提升系统运行期间的无功功率、三相母线电压的实测数据和现场操作人员的经验,将输入eu、eq和输出ytcr的对应关系总结成模糊条件语句并得到模糊控制表(见表1)。

表1 模糊控制规则Tab.1 Fuzzy control rules
通过模糊控制器的两个输入量eu,eq与输出量ytcr之间的模糊推理规则可以在MATLAB中方便地查看糊控制器的输出曲面,具体如图8所示。
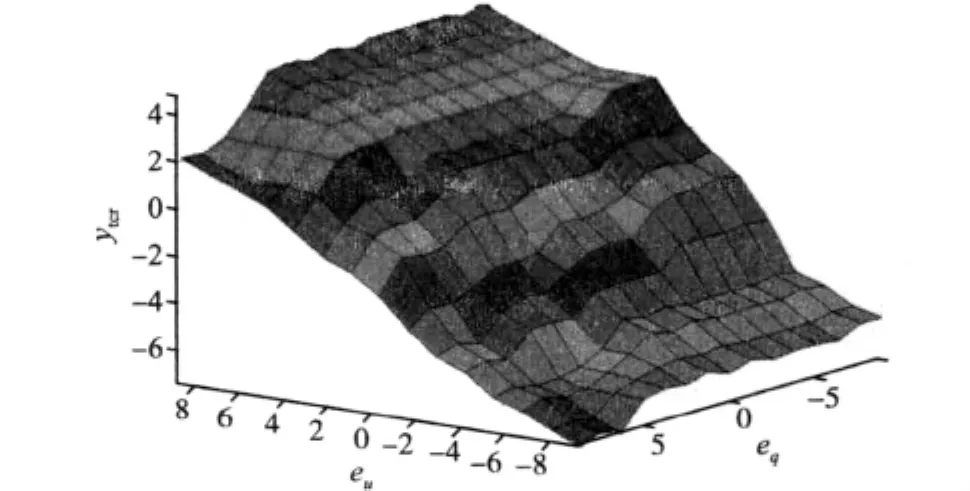
图8 模糊控制器三维输出曲面Fig.8 3D output surface diagram of fuzzy controller
由图8可以看出,根据系统电压、无功功率的情况可将曲面大致分为几个区间。而在不同区间内,模糊控制器具有非线性的调节功能而且区分度良好,能根据反馈电压、无功信号快速地调整晶闸管触发角度,控制TCR支路发出的无功功率对系统无功实时补偿,同时稳定电压。
5 SVC控制系统仿真
根据矿井提升供电系统的参数,设置仿真电路母线电压为6 kV,母线PCC点处最小短路容量为60 MVA。在系统运行时间为(0.25,0.75)s 和(0.9,1.6)s的过程中向其投入有功功率为1.2 MVA及0.7 MVA的无功功率,以模拟提升机这一冲击性负荷在运行过程中功率变化实际工况。设置仿真时间为2 s,通过示波器观察供电系统补偿前的电压、无功功率的波形情况,具体如图9所示。

图9 未投入TCR+FC型无功补偿系统时电压、无功功率波形Fig.9 Voltage and reactive power waveform before putting TCR + FC type reactive powercom pensation system
由图9可以看出,在提升机等冲击性负荷投入电力系统时,系统的无功功率发生较大的波动,对供电系统产生巨大的冲击,相应的系统母线上的电压也出现了较大波动,电压的波动值已经超过母线PCC点处电压波动的上限值。没有投入无功补偿装置时系统的无功功率、电压波动较大不能通过电力系统自身进行调节。
在矿井提升系统的供电母线上并联TCR晶闸管控制电抗器支路以及11次、13次、高通滤波支路,SVC控制系统采集三相母线电压、电流,经过瞬时无功功率计算模块获得当前系统无功功率、电压水平,通过计算被补偿系统所需无功功率对应的等效电纳值控制晶闸管的触发角度。当电压波动及无功功率超出设定值,其偏差较大时,控制器能较快地进行控制,设定系统仿真时间为2 s。补偿前后系统电压波动以及无功功率变化的对比情况分别如图10和图11所示。

图10 补偿前后电压曲线比较Fig.10 Voltage curve com parison chart before and after the com pensation
由图10可知:投入无功补偿装置前,系统电压的波动比较大,特别是在负荷运行过程中波动十分剧烈,需较长时间才能恢复至正常值。投入无功补偿装置后,经过较短时间的调节系统电压即可迅速稳定和恢复。
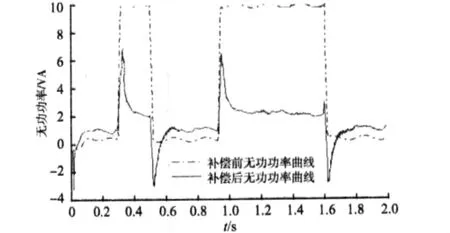
图11 补偿前后无功功率曲线Fig.11 Reactive power curve chart before and after the compensation
由图11可知,投入无功补偿装置前,其无功功率值很大,且在负荷运行过程中波动较大,对供电系统产生了较为剧烈的无功冲击。投入无功补偿装置后,无功功率维持在一个较低的水平,在提升机启动、停机过程中系统的反应较为迅速,能够迅速稳定电压、补偿无功功率。而在稳定运行时能够获得较好的稳态性能,系统具有较高的鲁棒性。由此证明文中设计的无功补偿控制器能满足矿井提升系统对快速、稳定和可靠性的要求。
6 SVC工程效果及节能效益分析
6.1 SVC的无功补偿及谐波治理效果分析
通过投运无功补偿装置前后系统6 kV母线电压、三相电流、功率因素、11次、13次谐波电流等电能指标的测试比较,验证针对矿井提升系统的无功补偿装置主电路结构、参数以及控制方案的合理性和有效性。
6.1.1 提高母线电压质量 提升机提矿运行的周期大约为100 s,为了更加全面地比较无功补偿装置投运前后对稳定母线电压、减少电压波动的效果,对装置投运前后母线的三相电压各进行了10 min的测试。其母线电压测试结果如图12所示。
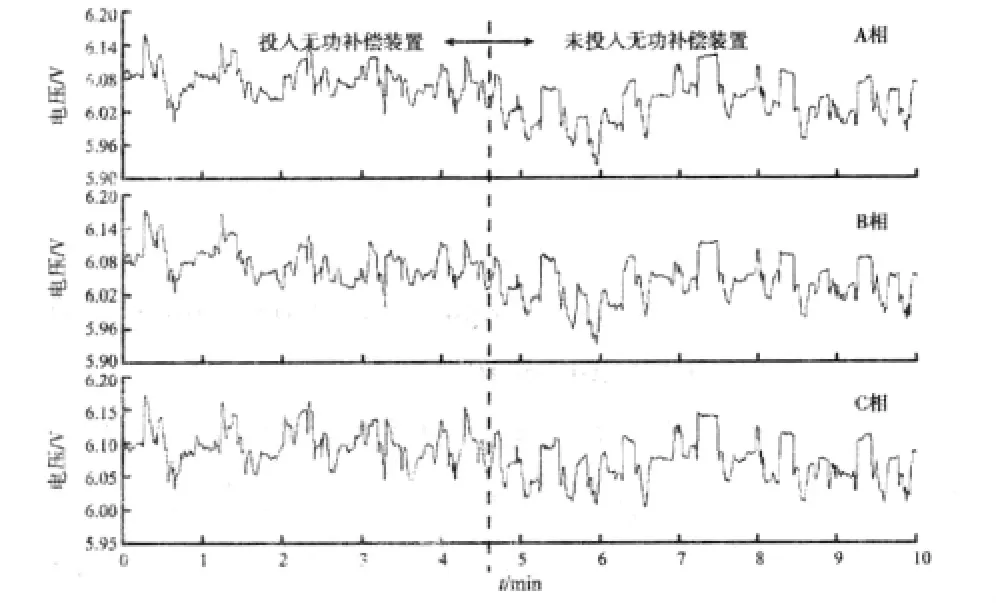
图12 无功补装置投运前后母线电压波形Fig.12 Three-phase busbar voltage wave form before and after the operation of reactive power com pensation device
由图12可知,在提升系统母线未投运无功补偿装置时,母线电压偏低且其波动性较大,在提升机加速启动和减速停机过程中电压的波动尤为明显。在一段时间内对三相电压进行统计分析,其低电压的概率比投入无功补偿装置后要大,另外母线的三相电压存在一定的不平衡。投入无功补偿装置后,系统电压在装置投入的瞬间有小幅波动,但在短时间内快速达到相对稳定值。从统计数据看整个母线电压得以提高,其电压的波动性有所降低,特别是在提升机稳定运行时电压波动较小,因此文中设计的矿井无功补偿装置对于提高母线电压并且在提升机稳定运行阶段减小母线电压波动具有显著的效果。
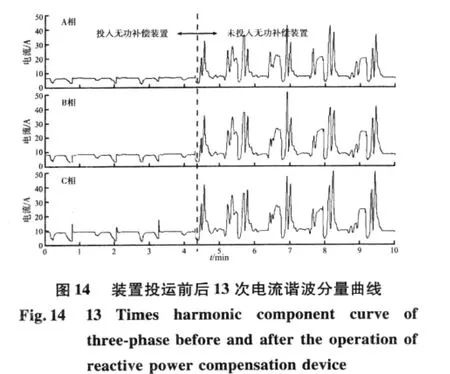
6.1.2 减少三相电流11次、13次谐波含量效果分析 为了验证设计的11次、13次单调谐滤波器组对系统母线中特征次谐波的滤波效果,对装置投运前后三相母线中电流谐波分量各进行了10 min的测试。三相母线电流11次、13次谐波分量的测试结果如图13、图14所示。
由图13、图14可以看出,未投入电容滤波器组进行滤波时,三相电流中的11次谐波电流在30 A左右,其谐波含量超过国家标准。另外,11次谐波的畸变率达到了10%以上;在经过滤波器组滤波之后,在提升机稳定运行时其电流有效值减少到2~3 A之间,11次谐波的畸变率也降低到了1.2% 左右。投入滤波器组进行滤波前,三相电流中的13次谐波电流在25 A左右,13次谐波的畸变率达到的9%以上;经过滤波器组滤波后,提升机稳定运行时其电流有效值减少到2 A左右,13次谐波的畸变率也降低至2% 左右。其次,在滤波器组投入之前,在提升机加速启动和减速停机过程中其谐波电流的冲击比较强烈波动十分明显;投入滤波器组进行滤波后,谐波电流的含量、波动性迅速减小,11次、13次谐波电流的畸变率完全达到国家标准,滤波效果十分显著。

6.1.3 提高系统功率因素效果分析 为了验证无功补偿装置对于提高系统功率因素的效果,对其投运前后系统的功率因素进行了长时间的测试比较,具体结果如图15所示。
由图15可以看出,在未投入无功补偿装置前系统的功率因素较低,其功率因素水平普遍在0.6左右,其功率因素不稳定,波动性比较大。在投入无功补偿装置后,系统功率因素得到迅速提高,在提升机运行期间其功率因素始终能维持在0.99左右的水平,对提高该矿井提升供电系统的功率因素效果十分明显。
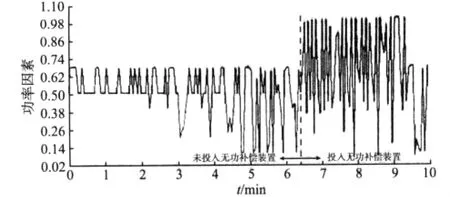
图15 无功补偿装置投运前后功率因素曲线Fig.15 Power factor curves before and after the operation of reactive power compensation device
6.2 SVC工程应用的效益分析
根据矿井提升供电系统参数设计的无功补偿装置能够对无功功率进行实时快速补偿,并且能够对特征次谐波加以治理以达到国家标准,从而减少注入电网中的大部分谐波电流,提高设备利用效率,减少功率损耗,稳定电网电压,提高电能质量,同时延长用电设备的使用寿命,达到节能减排、安全生产和提高企业经济效益的目的。
1)合理安装补偿设备能提高功率因数,减少线路和变压器损耗并提高电能质量。在三相对称负荷下其电压损失为

在该矿井的主变压器低压侧投入无功补偿装置后其相应的电压损失可以减少:

如果在供电线路末端采用并联方式的SVC动态无功补偿装置,线路电压在传输过程中的损失能够减少的百分比为
式中:X为线路电抗(Ω);Ue为线路额定电压(V);QC为补偿电容器的补偿容量(VA)。
根据对该矿井提升供电系统的分析,对其1#主变压器低压侧和2#主变压器进行计算可知,其变压器低压侧电压可以提高的百分比为

实践表明:电网电压过高时往往也是电力负载较轻,功率因数偏高的时候,这时可以适当减少SVC动态无功补偿装置的投运容量。这样能同时起到合理补偿无功功率和调整电压水平的作用。当线路输送有功功率和电压不变时,其损耗与功率因数成反比,提高功率因数可降低线路的功率损耗,当电流通过导线时线路损耗为
式中:ΔP为线路或变压器有功损耗(kW);:R为线路或变压器每相电阻(Ω);I为线路或变压器通过电流(A);P为线路或变压器输送有功功率(kW);Ue为线路的额定电压(kV)。
若忽略因提高功率因数而使电压损失减小对负荷电压所产生的影响,当矿井提升供电系统的功率因素由cosφ1提高至cosφ2,在电能传输过程中线路消耗的有功功率:

经过计算,其有功功率降低为17.5%。
2)对于变压器损耗而言,主要分为铁损和铜损,变压器铁损与负荷电流无关,而铜损与负荷电流相关,无功补偿装置投运后会改变负荷电流的大小从而使变压器的铜损部分产生相应地改变。而变压器的负载损耗近似等效为变压器的铜损,单、双斗提升机的功率因素从0.5提高到0.95的水平,经计算可得:投运SVC无功补偿装置前后变压器能减少的损耗分别为86.35,73.57 kW。
根据以上分析可知:在矿井中矿井提升系统是持续运行时间最长、电能消耗最大的重要生产设备之一,由于矿井供电线路面广、负荷的变化性明显,特别是提升机在选型时充分考虑了其功率所对应的阈量,在实际生产运行过程其效率和功率因素较低,进行无功功率补偿不仅能使得供电线路电压稳定、功率因素提高并增加电力系统的稳定性,更重要的是还能节约大量的电能。大多数采矿企业通过对供电线路进行无功补偿后,可以由以前的功率因素不达标面临电力部门罚款变为获得相应的节能补贴。因此,对工矿企业功率因素较低的供电线路实施无功补偿具有十分重要的经济和社会效益。
7 结语
提出了基于模糊-PI双模控制作为无功补偿装置的控制算法,通过分析矿井提升机这一冲击性负荷运行期间电压、无功功率等的变化情况,在其变化范围较小的情况下使用PI控制算法对其实施快速、准确的控制,而在其变化范围较大时通过模糊控制算法对其进行补偿。由于其具有良好的鲁棒性,在一定程度上能够减少内部和外部干扰对系统稳定性的影响,设计开发的无功补偿与谐波治理综合装置具有良好的工程实践应用效果,在工矿企业具有广泛的应用前景。
[1]ZHENG Hao-xin,ZHENG Bin,YIN Yun-hua.Simulation and design of numeral fuzzy PID controller system[J].Mechanica Engineering and Automation,2009(2):121-123.
[2]SHILv-hua,SHAN Hong-tao,KANG Yong.The novel digital control restraining circulating currents strategy based on tracing the transient average current in parallel inverter system[C]//2nd IEEE International Symposium on Power Electronics for Distributed Generation Systems(PEDG).Hefei:IEEE,2010:329-332.
[3]ZHAO Dan,QI Xiao-hui.Comparison of simulation between fuzzy-PID mode controller and fuzzy controller[J].Science Technology and Engineering,2009,9(11):3097-3100.
[4]王兆安,杨君,刘进军.谐波抑制和无功功率补偿[M].北京:机械工业出版社,2004.
[5]张定华,桂卫华,王卫安,等.混合动态无功补偿装置及其应用研究[J].电机与控制学报,2010,14(2):71-79.ZHANG Ding-hua,GUIWei-hua,WANGWei-an,et al.Mixed dynamic reactive power compensation equipment and its application[J].Electric Machines and Control,2010,14(2):71-79.(in Chinese)
[6]谢仕宏.Matlab系统动态仿真实训教程[M].北京:化学工业出版社,2009.
[7]罗安.电网谐波治理和无功补偿技术及装备[M].北京:中国电力出版社,2006.
[8]徐新乐.电网动态无功、三相不平衡和谐波综合治理的优化方案的研究[D].北京:华北电力大学,2009.
