超视距协同空战网络化效应研究
2013-04-24贾子英
陈 正,王 磊,贾子英
(海军航空工程学院,山东 烟台 264001)
现代化战争中,“网络”这一词汇已经成为所有相互连接系统的普遍代名词,美军网络中心战理论[1-6]正是这一现象的代表性体现。超视距协同空战中,由预警机和具有超视距空战能力的战斗机构成的协同实体之间基于信息和指挥关系的互连互通也是网络化作战的一种体现。对于网络化协同作战的研究,有许多文献用不同的方法从不同的角度进行了具体分析[7-11],但是目前的系统组网理论与方法大都忽略了对组网后的军事系统网络化作战效应研究。基于这样的目的,本文将利用复杂网络理论[12-13]对超视距协同空战的实体及实体间的联系进行节点和边的抽象处理并进行网络化模型构建,在所构建的模型基础上利用网络与矩阵之间的转换,把矩阵的特征值作为网络化效应的度量进行网络化效应分析,体现网络化协同结构对超视距协同空战的影响,为后续研究超视距空战协同提供相关理论基础。
1 超视距协同空战概述
超视距协同空战是以空战胜利为目标,以信息、决策、火力为中心,在多种因素的竞争与协同相互作用下,最终实现空战多机、多编队之间的整体效应[14-16]。其协同实体包括预警机和战斗机,协同要素包括组成预警机和战斗机的信息系统、飞控系统、任务系统、武器系统等。若将超视距协同空战的要素或子系统按照信息节点、指挥控制节点和执行节点来分类,可由图1来表示其指挥结构的层次和各要素之间的关系。在图中,带箭头实线表示指挥控制关系,带箭头虚线表示信息交互关系。要注意的是:实际上,信息节点和执行节点之间也存在信息交互,各层不同节点之间也存在信息交互关系,为使图表表示清晰,图中并未体现此类信息交互关系,只是着重体现了指挥控制关系[17]。
2 超视距协同空战网络化协同结构模型构建
2.1 节点、边的抽象
超视距协同空战各实体和实体间的联系构成了协同结构的基础:节点和边。本节将依据复杂网络理论对超视距协同空战实体的构成进行节点和边的抽象处理[8,18]。
图1 超视距协同空战指挥控制层次及部分信息交互关系
2.1.1 网络节点模型
节点是表示产生、使用和处理数据的体系结构要素的一种方法,用它定义一个网络的要素。本文将作战单元抽象为三类,在网络模型中对应三类节点模型,分别为火力打击(F)节点、传感器(I)节点和指挥决策(D)节点模型。同时考虑对抗条件下的情况,加入目标节点(T)。
1)传感器节点:探测空袭目标信息并接收其他节点传送过来的信息,实现数据融合功能,把相关信息发送给决策节点,如预警机雷达、二次雷达、战斗机机载雷达等。
2)指挥决策节点:接收各类传感器传送过来的信息,并及时就当前和将来其他节点的部署做出决策。决策节点可以是人(如各级指挥员)、也可以是其他实体(如辅助决策系统等)。
3)火力打击节点:接收传感器发送的预先目标信息和决策节点的指令,与其他节点相互作用并影响其他节点的状态(如载机的火控系统和超视距打击武器系统)。
4)目标节点:主要指超视距协同空战中敌方所有具有军事价值的节点。
2.1.2 网络节点边模型
本文定义如下几种类型的网络边模型:
1)指挥控制关系D—D:是对指控单元和指控单元之间的信息交互关系的抽象,描述了不同指控单元之间的决策协同,传统的指控单元之间是一种树型的层次结构,网络中心战条件下的分布式指控单元之间是一种网状结构。
2)信息共享关系I—I:是对传感器单元和传感器单元之间的情报信息交互的抽象,情报信息共享关系反映了情报单元之间的信息共享程度,一般为双向。
3)作战信息关系F—I:由火力打击单元和传感器单元之间的信息交互关系抽象出来,表示了传感器单元对作战单元的信息传递、感测、定位等感知行为(双向)。
4)指控信息关系D—I:描述传感器单元和指控单元之间的信息交互双向关系。这其中的信息交互包括传感器单元为指控单元提供情报信息,指控单元对传感器单元进行控制指挥等。
5)指控作战关系D—F:是对指控单元与火力打击单元之间的信息交互关系的抽象(双向)。
6)传感器目标关系I—T:描述传感器单元对目标的探测、发现与识别的关系(不考虑敌对我的打击,单向)。
7)火力打击目标关系F—T:表示我火力打击单元对敌方目标的超视距打击关系(单向)。
8)武器协同共用关系F—F:表示我火力打击节点之间的武器协同共用,体现火力协同。
2.2 超视距协同空战网络化结构模型构建
网络的拓扑结构可以用邻接矩阵来表示[24]。超视距协同空战网络作战抽象图的邻接矩阵如图2所示。需要说明的是,邻接矩阵中的“1”表示从行节点(要素)至列节点(要素)之间有一条链路,“0”表示两个节点间没有链路(链路的方向都是由行指向列)。
考虑到分析问题的普适性,在进行协同网络的分析时,本文主要针对8架战斗机组成的多机编队,基于树型指挥结构和分布式指挥结构,分别讨论以下几种情况:信息共享与不共享(传感器协同);有无决策协同;存在武器的互操作与否(火力协同);有无预警机指挥引导。
图2 网络作战抽象图及邻接矩阵
图3至图8中,方形节点表示决策节点,下三角形节点表示传感器节点,菱形节点表示火力打击节点,上三角形节点表示目标节点。表1为节点与超视距协同空战实体之间的对应关系。
表1 节点与超视距协同空战实体之间的对应关系
图3 无协同作战和仅火力协同
图3(a)表示战斗机之间无协同的作战形式,各战机按照“先发现先攻击”的原则进行超视距拦截,两机之间无传感器协同、决策协同、火力协同。图3(b)表示8架战斗机之间只有各双机编队内部存在基于武器协同共用思想的火力协同情况。
图4表示编队之间只存在传感器节点之间协同的情况,其中(a)为树型指挥结构下的传感器协同,此时只有战术编队指挥员之间和相应双机编队长机、僚机之间存在传感器协同;(b)为分布式传感器协同。
图5表示编队之间只存在决策节点之间的协同情况,其中(a)为树型指挥结构下的决策协同,此时只有战术编队指挥员之间和相应双机编队长机、僚机之间存在决策协同;(b)为分布式决策协同。
图6表示表示编队传感器节点、决策节点之间存在协同的情况,能够形成信息的共享和组织决策、战术决策的协同。其中,(a)为树型指挥结构,(b)为分布式结构。
图7表示编队存在传感器、决策、火力协同的情况。其中,(a)为树型指挥结构,(b)为分布式结构。
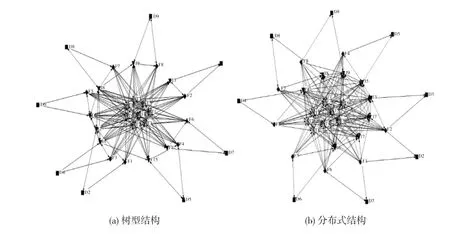
图4 仅传感器协同
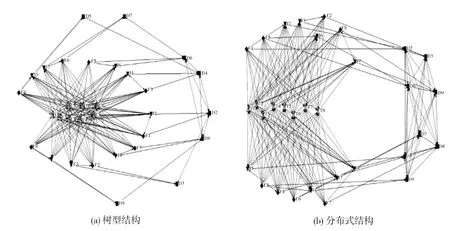
图5 仅决策协同
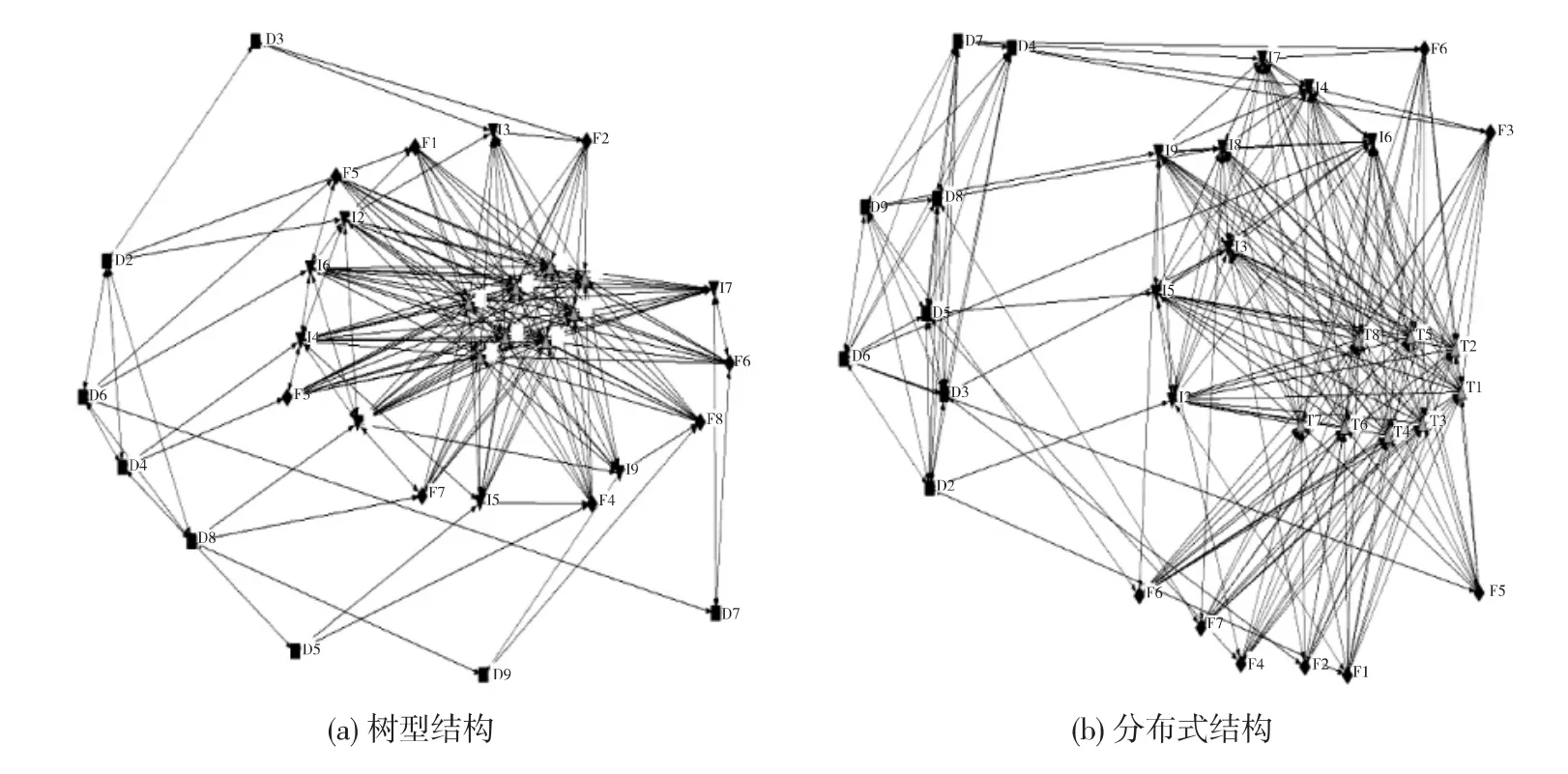
图6 传感器+决策协同
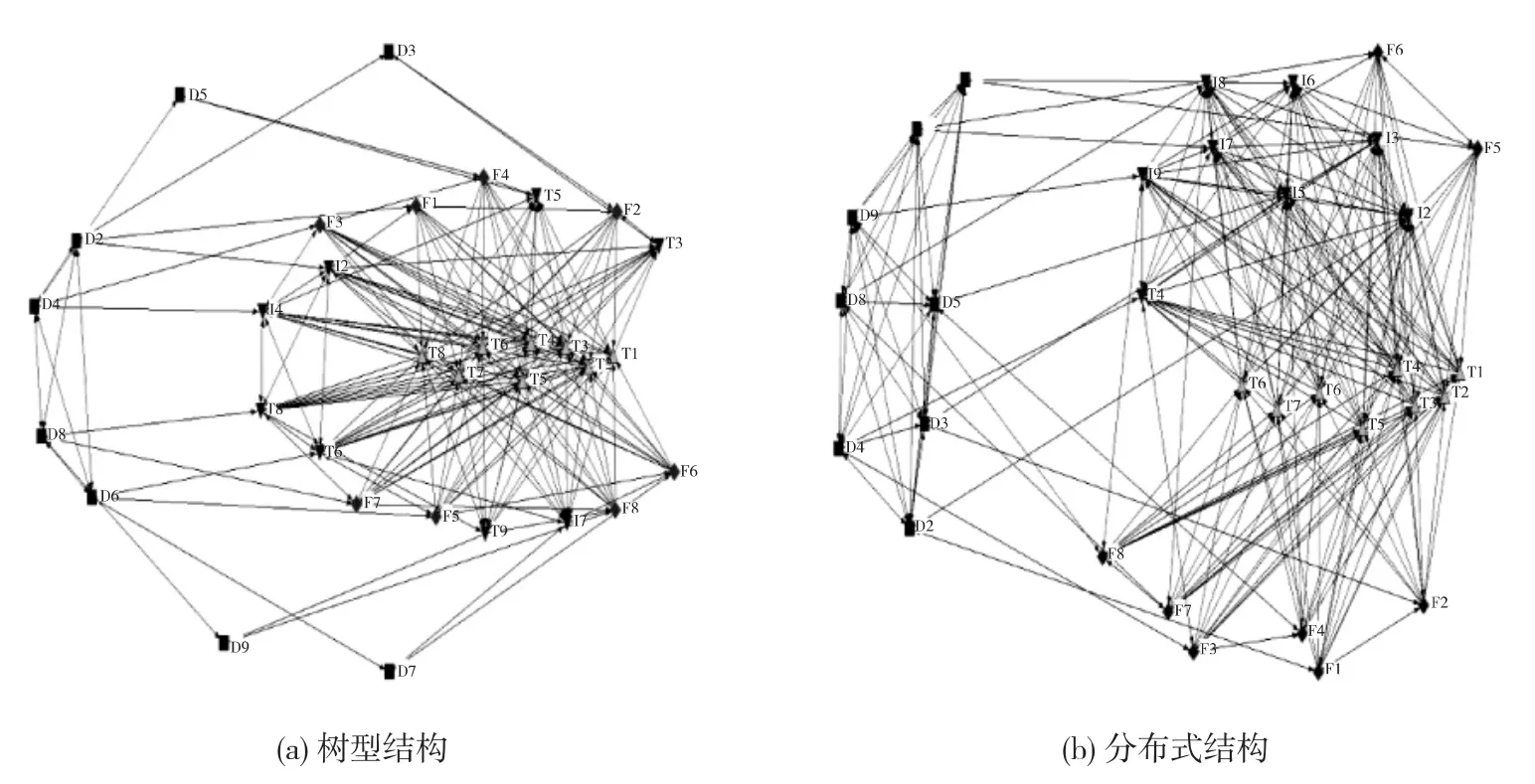
图7 传感器+决策+火力协同
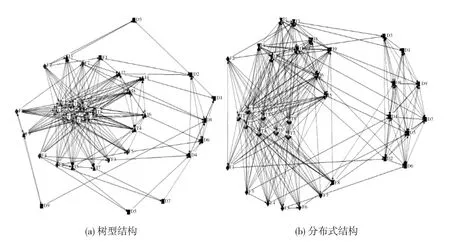
图8 预警机引导下传感器+决策+火力协同
图8表示有预警机参与指挥控制的多机协同超视距协同空战的情况,此时信息协同更加完善,决策协同质量提高,火力协同更加完善。
3 网络化效应的数学度量
在网络拓扑模型中,本文利用邻接矩阵对战斗机协同组网的网络模型进行数学化描述;而数学上,矩阵的特征值有着明确的意义,其反映了矩阵构成的性质。对于本文建立的协同网络模型而言,邻接矩阵可以用来计算该网络的各种参数及性能,特征值能够反映网络连接的静态特性,当网络节点在损坏情况下进行重组时,特征值还反映网络的动态特性[24]。由 Perron-Frobenius定理可知:矩阵至少存在1个大于所有特征值、实的、非负特征值λPFE,叫做最大特征值,它反映了网络最大伸缩性,即网络的动态适应性。λPFE越大,则该网络的网络化效应越好。所以本文采用网络对应的邻接矩阵的λPFE作为度量其网络化效应具有一定的现实意义。
邻接矩阵为0-1矩阵,该Perron-Frobenius特征值有3种不同的取值,而这3种不同值正好对应于网络化效应的3种度量:无环网络、单环网络以及“自催化”网络[3]。
1)无环网络
无环网络就是协同网络中的节点之间有向链接,不能形成闭合回路的网络。其矩阵的PFE值为0。无环网络的示意图如图9所示。
2)单环简单网络
单环简单网络指的是没有后向反馈及前向反馈捷径的环。由于没有捷径,也就没有复合的网络化效应,该网络的邻接矩阵PFE值恰好等于1.0。单环简单网络如图10所示。
3)“自催化”网络
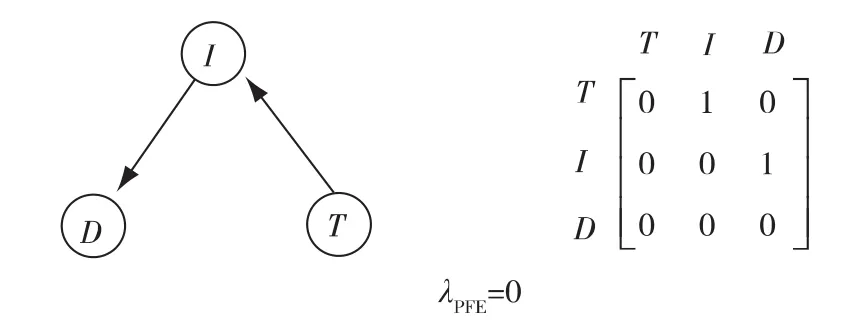
图9 无环网络
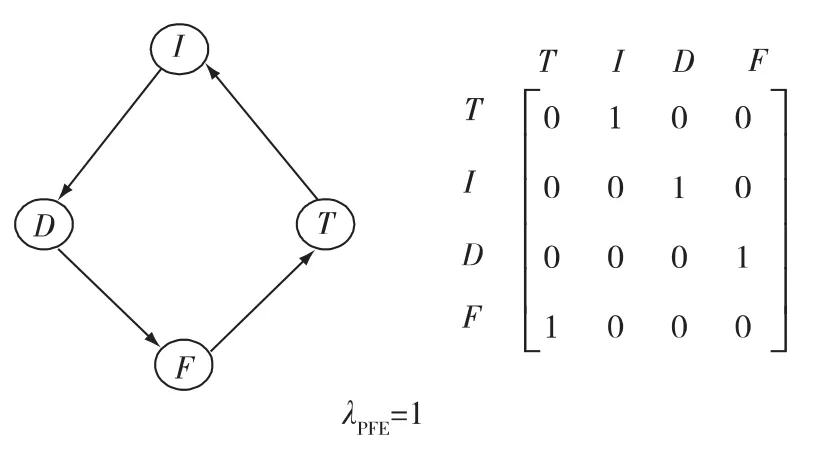
图10 单环简单网络
一个协同作战网络中,可能存在多个环。对于一个全连通网络,如果节点数为N,记网络环的数为Q,则有
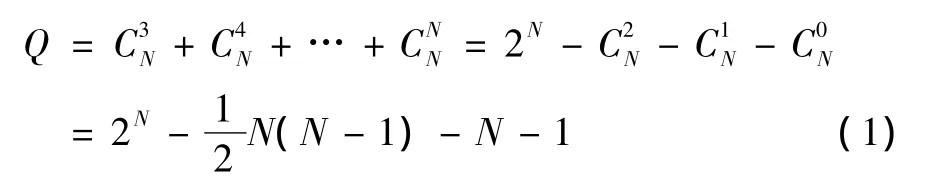
但在实际作战网络中,由于节点之间存在一定的关系,这种关系来自于作战程序、作战规则和武器装备的使用等,所以,协同网络中的多环网络数远远小于全连通的网络中的环数。
图11与图10相比,只是增加了节点和链路。但正是增加的节点和链路形成的后向及前向反馈机制产生了网络化效应。一个具有捷径的网络其邻接矩阵的PFE值总是大于1.0。因此,PFE值可以用来度量这些捷径复合简单环的效果以及产生的网络化效应。本文将这种增加节点和链路的行为称为附加结构行为,定义:把简单环网络通过附加结构行为从而得到的网络称为“自催化”网络。
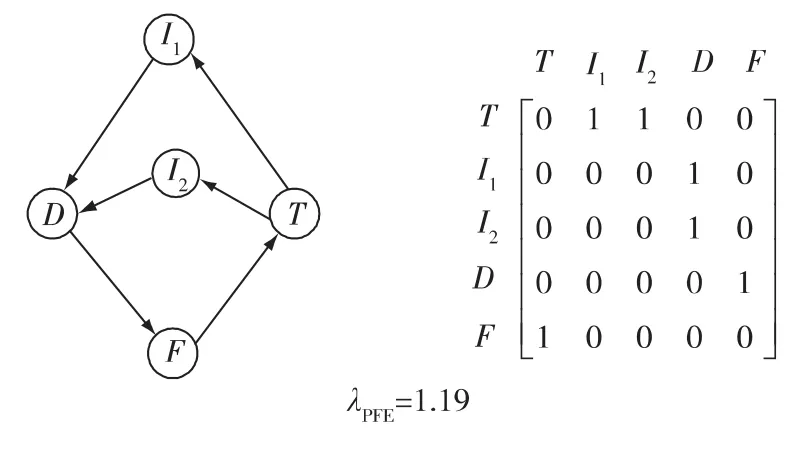
图11 “自催化”网络
N×N邻接矩阵的λ的最大值为N,定义网络化效应系数Ep来度量不同规模网络的网络化效应,其可以用式(2)进行计算:

可以看出,Ep的取值范围从1/N至1.0(对于PFE大于1.0)。
4 超视距协同空战网络化效应分析
根据图3-图8中所示的几种情况,可根据其邻接矩阵分析协同网络的网络化效应。由于协同网络中节点数有30多个,所形成的邻接矩阵较大,若一一列出所占篇幅太大,因此只以无协同条件下的作战网络和预警机指挥引导下的分布式协同作战网络邻接矩阵为例可得图12。
对所建立的协同网络的邻接矩阵进行分析可以得到网络化效应的分析结果如表2所示。
由表2中数据分析可得相关结果如图13所示。
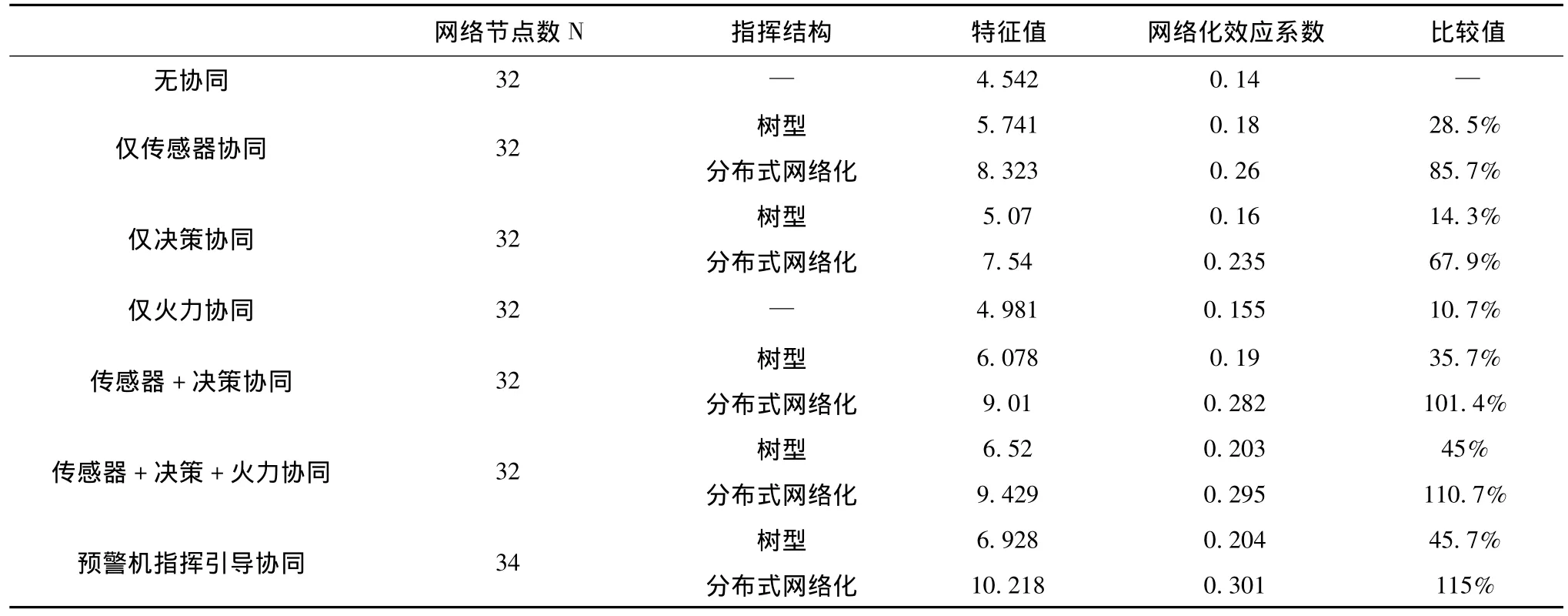
表2 网络化效应分析结果
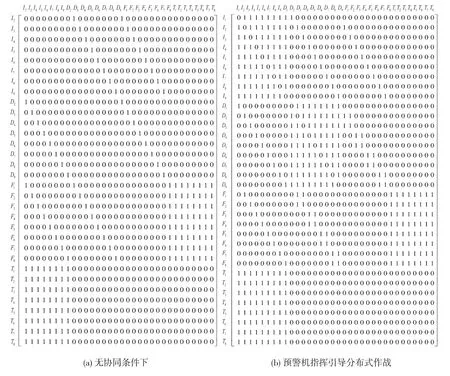
图12 作战网络邻接矩阵
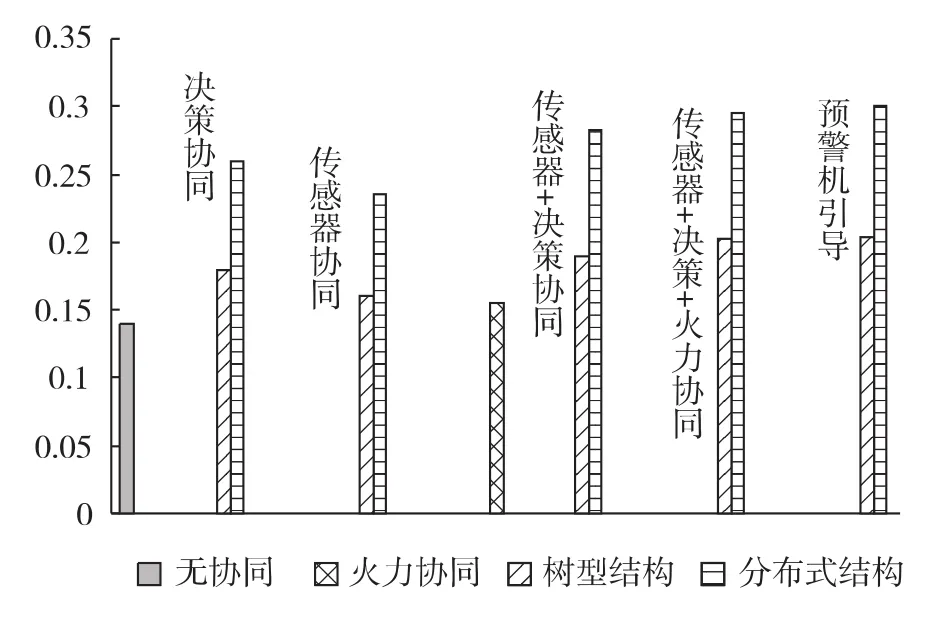
图13 超视距协同空战网络化效应
5 结论
由表2和图13分析可知:
1)无论是传感器协同、决策协同还是基于武器协同共用思想的火力协同,都可以提高网络化效应。相对来讲,传感器协同对网络化效应提高的幅度较决策协同或火力协同都大,从这里也可看出信息对于超视距协同空战的重要性。
2)在空战过程中,指挥结构对协同效果影响较大。在不同的协同情况下,分布式指挥结构较传统树型指挥结构能大幅提升网络化效应,更能发挥协同的作用。
3)从预警机的作战使用来看,传统树型结构下,预警机的协同作用对网络化效应提升有限,在本文所假设的分布式指挥结构下,预警机的协同作用对网络化效应的提升也不算很大,这可能与假设的条件,即传感器节点与决策节点以及传感器节点与火力打击节点之间的链接仅限于平台内有关。
[1]Department of Defence.Network Centric Warfare[R].Washington DC:Department of Defence Report to Congress,1999.
[2]Carrica P.Network Centric Warfare Department of Defence Report to Congress[R].Washington DC,2001.
[3]何建华,高晓光,杨莉,等.网络中心战概念及其空战应用研究[J].火力与指挥控制,2003,28(4):51-54.
[4]赵滨江.论网络中心战[M].北京:解放军出版社,2004:68-250.
[5]王钰洁,王宝树.网络中心战概念及其体系结构模型[J].情报指挥控制系统与仿真技术,2005,27(6):30-34.
[6]王钰洁.网络中心战概念及其网格体系结构研究[D].西安:西安电子科技大学,2006.
[7]王刚,立为民,何晶.防空武器系统网络化协同交战建模与仿真[J].系统仿真学报,2005,17(1):45-48.
[8]陈国生.基于协同网络的航母编队防空火力作战运用研究[D].烟台:海军航空工程学院,2011.
[9]张扬,张嵩,冯昌顺.舰空导弹网络化协同作战能力及关键技术[J].飞航导弹,2011(2):15-18.
[10]刘兵,代进进,李相民,等.舰艇编队网络化体系协同反导作战分析[J].舰船电子工程,2010,30(2):5-8.
[11]张平定,郑寇全,王睿.空地协同网络化防空数据融合系统建模[J].现代雷达,2011,33(3):5-7.
[12]汪海.基于复杂网络理论的指挥控制组织分析研究[D].长沙:国防科学技术大学,2007.
[13]姜伟,马政伟.舰艇编队防空作战复杂网络建模[J].舰船科学技术,2010,32(11):101-104.
[14]高劲松,邹庆元,丁全心.超视距空战的几个观点[J].电光与控制,2008,15(5):44-47.
[15]吴文海,周思羽,高丽,等.超视距空战过程分析[J].飞行力学,2011,29(6):45-47.
[16]李林森,于海勋,韩志刚.论协同空战及其关键技术[J].电光与控制,2000(1):29-34.
[17]罗继勋,雷洪利,胡朝晖,等.预警机指挥控制飞机及编队作战原理[M].北京:解放军出版社,2009.
[18]于全.分布式网络化作战——网络中心战基础[M].北京:北京邮电大学出版社,2006.
