高灵敏度SCR 微悬臂梁设计仿真
2013-04-21李其昌王广龙高凤岐卢江雷张姗姗
李其昌,王广龙,高凤岐,卢江雷,张姗姗,王 磊
(1.军械工程学院,河北 石家庄050003;2.上海市计量测试研究院,上海200233;3.中国科学院 微电子所,北京100029)
0 引 言
微悬臂梁是MEMS 中常见的微结构之一[1],近年来,因其结构简单、灵敏度高[2],应用范围不断拓展,如在微力检测[3]、加速度、振 动 检测[4]、生化学检 测[5,6]、环 境检测[7]、红外辐射热探测[8]等场合都有重要应用。为改善传统微悬臂梁的测量性能,其改进研究方兴未艾。其中,为提高灵敏度,同时减小测量范围和测量带宽的损失,人们提出了引入应力集中区域(stress concentration region,SCR)[9]。
微悬臂梁结构的灵敏度、测量范围和测量带宽均与最大应力、变形位移和模态特征有直接关联。研究微悬臂梁结构在引入SCR 之后的应力特征、形变特征和模态特征能够很好地反映其灵敏度和测量带宽等性能特性。本文对微悬臂梁结构增加SCR 之后的测量性能,尤其是其动静态灵敏度与测量范围、带宽之间的关系进行了系统的模拟仿真实验,能够从引入SCR 这一设计思路,为各种不同应用场合和使用目的的微悬臂梁结构设计提供参考。
1 研究基础与理论分析
应力集中现象是指物体中应力梯度局部增高的现象,一般出现在物体形状急剧变化的位置[10],适量的应力集中对于提高微悬臂梁在激励作用下的灵敏度有很大的提高作用。
微悬臂梁通常有2 种工作模式[11]:静态模式,检测外场作用或自身内应力变化导致的静态弯曲变形或应力特征;动态模式,检测由于弹性系数、附加质量、阻尼系数的改变而导致的振动特性的变化,如振幅、频率、品质因子等。
文献[12]仿真分析了影响压阻微悬臂梁灵敏度的主要因素,其考察对象仅限于一般矩形结构微梁;文献[6]考察了不同梯形梁结构的灵敏度特征,考察对象仅围绕梁本身的形状变化进行分析;文献[13]对于电容式微悬臂梁的动态特性与其结构尺寸的非线性关系进行了建模与仿真,对工程应用有较好的指导作用,但并未涉及SCR 对微梁动态特性的影响;文献[9]分析了一些条缝结构SCR 对压阻式微悬臂梁灵敏度的影响,未涉及其他SCR结构的影响;文献[14]通过引入多种结构SCR 以提高压阻式悬臂梁的静态测量灵敏度,但对SCR 的体积形态位置等参数控制不够合理,同时缺少动态工作模式分析。
本文使用分析多因素问题常用的控制变量法,利用有限元仿真分析引入不同类型SCR 后微悬臂梁的动静态特性,考察不同SCR 对微悬臂梁测量性能的影响。仿真过程假设微悬臂梁材料线性且变形微小,结构刚度不发生变化。仿真结果给出了引入不同类型或尺寸的SCR 之后梁的动静态特性参数,通过微悬臂梁安全系数、最大变形位移、最大应力和各阶模态频率及其偏移量等特征来分析不同结构微悬臂梁的测量性能。
对于静态工作模式下的微悬臂梁,主要考察灵敏度和最大载荷测量范围的变化关系,其灵敏度S静为

对于同一静载荷变化量Δp,S静与位移变化量Δμ 呈正比,其载荷测量范围p静FS为

对于同一微悬臂梁,其灵敏度S静不变,测量范围p静FS与最大位移变化量ΔUmax呈正比,其最大位移变化量ΔUmax与梁安全系数n 的关系为

在同一载荷Δp,相同灵敏度S静下梁的安全系数n 正比于ΔUmax,即测量范围p静FS正比于安全系数n。
对于动态工作模式下的微悬臂梁,主要考察灵敏度和最大动态载荷测量频率带宽。文献[15]分析了共振工作状态下微悬臂梁的灵敏度与加载不同载荷类型的关系,证明了不同类型载荷灵敏度之间存在确定的数值关系,故本文仅考虑均匀分布微小质量载荷下其灵敏度S动的变化。

对于同一微小质量载荷Δm,S动与频率偏移量Δf 呈正比,其频率测量带宽 f动FS为

式中 i,j 为梁所工作的频率区域两端的模态等级,Δfij是工作频率区域两端模态频率之差。对于工作在一阶模态频率内时,f动FS即一阶模态频率值。
综上所述,一般情况下静态工作模式时静态灵敏度与应力(如压阻式)或位移(如电容式)呈正比,相同载荷下的安全系数与其静态测量范围p静FS呈正比;动态工作模式时其频率偏移量与灵敏度呈正比;其工作频率范围内相邻共振频率之间的间隔与测量带宽f动FS呈正比。
2 试验方法设计
对于不同结构形式的SCR 微悬臂梁结构直接推导其应力、位移及模态公式较为复杂,且对于复杂SCR 形式往往十分困难。借助计算机强大的运算能力,利用有限元方法模拟不同SCR 微悬臂梁的动静态特征能极大地提高运算效率。
为保证仿真结果的科学性,本文同一组实验所选取的仿真参数保持不变。有限元网格均为自由网格,均对SCR周围进行局部细划,所加载荷的类型、位置、方向、大小均完全一致。选取硅材料微悬臂梁结构,其轮廓尺寸为400 mm×100 mm ×10 mm。硅材料的屈服强度为1.2 ×108Pa,质量密度为2330 kg/m3,弹性模量为1.124 ×1011Pa,泊松比为0.28。为使得微悬臂梁产生微位移,静态测试时另一端切面施加定值静态末端外力9.81 N 载荷,模拟梁的应力、位移特性,计算其安全系数,如图1(a)所示;共振模式测试时整个悬臂梁法线方向上施加加速度9.81 m/s2,分别模拟加载相同均匀分布的微小质量前后微悬臂梁的各阶模态频率与偏移量的大小。为简化模型,假设增加微悬臂梁模型厚度1 mm,如图1(b)所示。微悬臂梁通常工作于一阶共振模态,重点分析该模态。
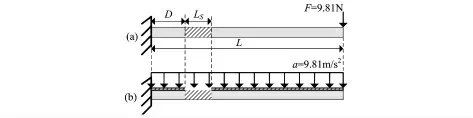
图1 仿真微悬臂梁的载荷形式Fig 1 Load form of simulated micro-cantilever
研究带有 50 mm × 50 mm 正方形(A 型)、50 mm ×50 mm菱形(B 型)、双 25 mm × 50 mm 半边矩形(C 型)、内切圆50 mm六边形(D 型)、直径 50 mm 圆形(E 型)SCR 微悬臂梁的静态、共振性能。目的是找到较为理想的SCR 形状,既提高灵敏度又对测量带宽的限制较小,避免引入SCR时的形状选择的盲目性。
为了解不同尺寸比例的SCR 对梁结构的测量性能产生的影响,设计不同尺寸矩形SCR,并模拟了其性能参数。SCR 尺寸型号有 50 × 50 矩形(A 型)、50 × 100 矩形(A1型)、50 ×200 矩形(A2 型)。
当SCR 所处位置不同时,对梁的测量性能也将产生不同的影响。不同位置以SCR 与固定端的距离D 划分为四类:50 × 200-D25 矩形(A21 型),50 × 200-D75 矩形(A2型),50 × 200-D125 矩形(A22 型),50 × 200-D175 矩形(A23 型)。
对于总体积相同的SCR,其体积分布方式不同也会对梁结构性能产生不同影响。将SCR 分成1 块、2 块、4 块,标记为:50 ×200-D25-50 ×1 矩形(A21 型),50 ×200-D25-25 ×2 矩形(A211 型),50 × 200-D25-12.5 × 4 矩形(A212型)。图2 所示为本文设计的SCR 微悬臂梁结构类型。
3 结果与讨论
3.1 SCR 形状对微梁动静态性能的影响
外力载荷下,A~E 型SCR 微悬臂梁的最大应力、位移、应变及安全系数改变情况仿真结果如表1 所示。

图2 各型SCR 微悬臂梁结构Fig 2 Various types of SCR micro-cantilever structures
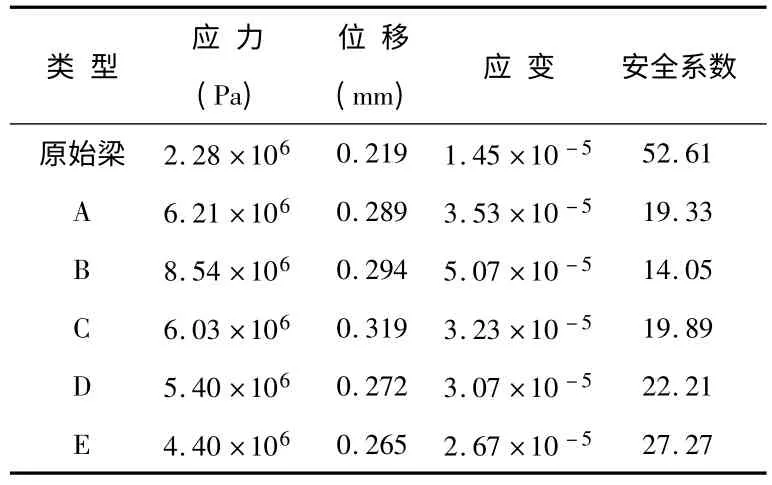
表1 不同SCR 形状微悬臂梁的静态性能Tab 1 Static performance of different SCR shape micro-cantilever
由表1 可见SCR 的引入虽降低了微梁的安全系数n,缩小了静态测量范围,但是SCR 对于微梁最大应力、位移、应变的提高也相当显著。对于不同形状的SCR,A 型与C型性能基本一致,相比于D 型、E 型提高更为明显;B 型提高最大,但考虑其安全系数过低,测量范围窄,也不是较好的选择。综合考虑A、C 型SCR 对梁的静态测量灵敏度提高较为明显,且测量范围的减小也可控,在此仅选取A 型做后续研究。
3.2 SCR 尺寸位置对微梁静态性能的影响
表2 所示为不同尺寸位置矩形SCR 对微悬臂梁静态性能的影响。由类型A~A2 可知随着SCR 尺寸的增大,微悬臂梁的最大应力、最大应变和安全系数变化幅度很小(均小于2%),而最大位移增加明显(A2 型比A 型增加约20.4%)。这一结论在通过检测微悬臂梁最大位移来测量被测对象的应用场合有较大参考意义。对此类应用,在一定限度内增加SCR 尺寸可以显著增加其测量灵敏度。
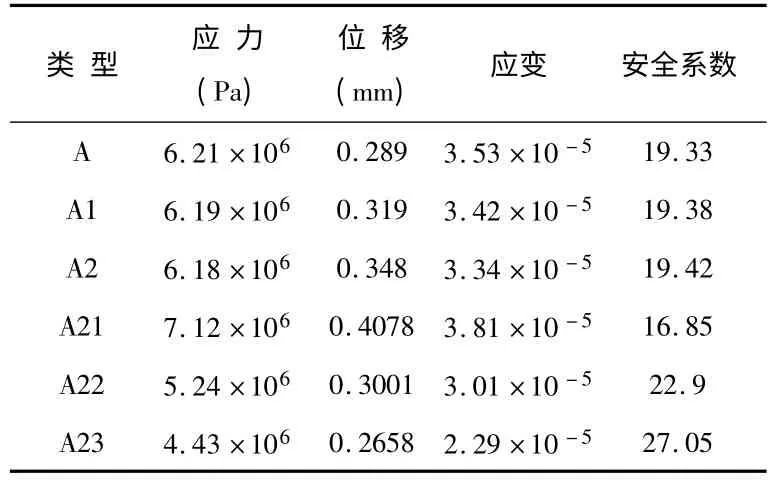
表2 不同尺寸位置SCR 对微梁静态性能的影响Tab 2 Influence of different sizes & location of SCR on static performance of micro-cantilever
由类型A21~A23 可知,随着SCR 与固定端的距离增加,微悬臂梁的应力、位移、应变逐渐降低,灵敏度下降;其安全系数逐渐增大,说明测量范围增加。在设计静态工作状态下的微悬臂梁SCR 位置时应综合考虑上述特性,尽量使得在满足测量范围要求的前提下将SCR 靠近固定端布置,以提高灵敏度。
3.3 SCR 尺寸位置对微梁动态性能的影响
不同尺寸SCR 使得微悬臂梁的模态特性发生变化。如图3 所示,与A 型相比,A2 型一阶、二阶模态形式变化不明显,但之后的高阶模态振型变化明显。因此,当振动工作方式仅测量低阶模态时,引入相同形状不同尺寸SCR 对测量结果影响不大,但高阶模态进行检测时应考虑不同尺寸对模态振型的影响。
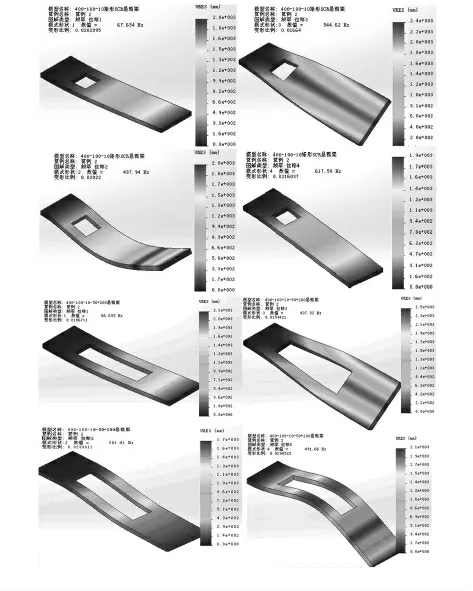
图3 A,A2 型 SCR 微梁前4 阶模态振型Fig 3 Modal vibration shape of fore-4-order A &A2 SCR micro-cantilever
增加微小质量前后不同位置SCR 对模态1 频率的影响数据如表3 所示。

表3 增加微小质量对模态1 频率的影响Tab 3 Influence of adding small mass on modal 1 frequency
考虑表3 的结果,可以看出随着SCR 与固定端距离的增加,模态1 频率明显增大,当增加微小质量后,模态1 频率偏移量明显增大,动态频移灵敏度增大。为获得较高的动态频移灵敏度,在SCR 微悬臂梁设计过程中可尽量将SCR 向自由端布置。
图4 所示为不同SCR 尺寸与位置微悬臂梁的模态1共振频率变化趋势。
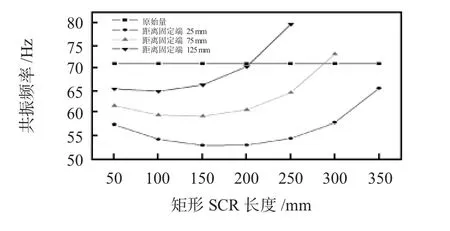
图4 不同尺寸位置SCR 微梁共振频率趋势Fig 4 SCR micro-cantilever resonance frequency of different sizes & location
由图4 结果可以得到下面2 个结论:1)矩形SCR 的引入,引起微梁刚性的降低,一般会减小微悬臂梁的弹性系数和共振频率;但SCR 远离微悬臂梁的固定端布置时,由于微梁刚度的降低小于有效质量的减小,因此,振动频率反而可能会高于原始微悬臂梁结构。2)增大SCR 结构尺寸,由于刚度和有效弹性系数的减小,微悬臂梁的共振频率一般会降低;但当矩形SCR 的长度Ls 约大于0.5L(即200 mm)时,由于有效质量的减小开始逐渐大于弹性系数的减小,因此,SCR 微悬臂梁的共振频率反而开始增大。
3.4 SCR 分布方式对微梁动静态性能的影响
表4 所示为不同SCR 分布方式下的动静态性能。由表4 可知分块式的SCR 分布方式明显降低了微悬臂梁的测量灵敏度,如A212 与A21 相比最大应力降低了约27%,最大位移降低了约17%;但对于测量范围的提高也十分明显,安全系数增加了约37%。
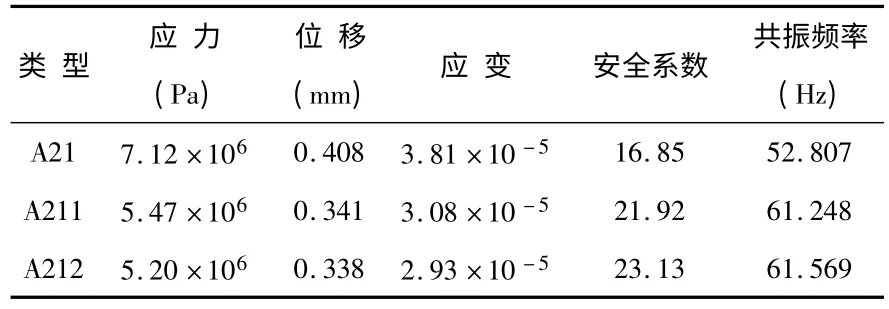
表4 不同SCR 分布方式下的动静态性能Tab 4 Dynamic and static performance of diffrent SCR distribution methods
对于动态工作模式的微悬臂梁,分块分布式SCR 微悬臂梁的共振频率明显增大,测量频率带宽增加。分块式的SCR 微悬臂梁对灵敏度的提高较少,但测量范围、频率带宽较大。在工程设计时应综合考虑分块式SCR 微悬臂梁将会增大工艺难度,增加制造成本。
4 结束语
由仿真结果可知,对于静态工作模式下的微悬臂梁,在传统的微悬臂梁上引入了SCR 可以获得较高的测量灵敏度,这导致微悬臂梁测量范围的减小。A,C 型SCR 对梁的静态测量灵敏度提高较为明显,且测量范围的减小也可控,对A 型SCR 进行分块设计将进一步提高测量灵敏度;随着SCR 尺寸的增大,微悬臂梁的灵敏度也将进一步提高,但过大的SCR 将严重降低测量范围,通常SCR 尺寸长度不超过梁长度的1/2;随着SCR 与固定端的距离增加,微悬臂梁的灵敏度下降,测量范围增加,因而,SCR 应尽量靠近固定端布置。对于动态工作模式下的微悬臂梁,随着SCR 与固定端距离的增加,模态1 频率偏移量明显增大,动态灵敏度反而提高。
[1] 樊尚春,刘广玉.新型传感技术及应用[M].2 版.北京:中国电力出版社,2010:11.
[2] 汪延成.仿生蜘蛛振动感知的硅微加速度传感器研究[D].杭州:浙江大学,2010.
[3] 房 轩,李艳宁,鄢志丹,等.基于微悬臂梁高次谐波的微小质量检测技术研究[J].光电子·激光,2008,19(1):62 -65.
[4] 张国军,陈 尚,薛晨阳,等.一种新型的压阻式硅微二维加速度计的设计[J].仪器仪表学报,2009,30(9):1940 -1945.
[5] 王军军,谢海芬,周 嘉,等.微悬臂梁在化学及生物传感器中的应用进展[J].微电子学,2004,34(5):493 -496.
[6] 王大甲,胡放荣,姚 军,等.基于微悬臂梁的化学传感器的灵敏度研究[J].传感技术学报,2008,21(8):1333 -1336.
[7] 滕艳华,薛长国.微悬臂梁传感器在环境检测中的应用[J].传感器与微系统,2011,30(4):5 -11.
[8] 梁晋涛,刘君华.碳纳米管微悬臂梁红外探测器的优化设计[J].光学学报,2004,24(11):1547 -1551.
[9] Mei Deqing,Wang Yancheng,Chen Ziche.Design of piezoresistive micro-cantilever with stress concentration region[J].Nanotechnology and Precision Engineering,2007,5(4):277 -280.
[10] 李晶影.考虑局部应力集中的机械零部件可靠性灵敏度分析[D].长春:吉林大学,2007.
[11]Lavrik V N.Cantilever transducers as a platform for chemical and biological sensors[J].Review of Scientific Instruments,2004,75(7):2229 -2253.
[12] 汪超男,李爱玲,周有铮,等.表面应力敏感型压阻微悬臂梁传感器的模拟[J].清华大学学报:自然科学版,2009,49(11):1876 -1879,1885.
[13] 周 华,沈连官,尤 辉,等.电容式微加速度计结构的建模及仿真[J].光学·精密工程,1999,7(4):59 -64.
[14] Firdaus S M,Azid I A,Sidek O,et al.Enhancing the sensitivity of a mass-based piezoresistive micro-electro-mechanical systems cantilever sensor[J].Micro & Nano Letters,2010,5(2):85 - 90.
[15] 张春娟,骆 英,李 红.压电微悬臂梁传感器性能的数值模拟研究[J].仪表技术与传感器,2011(1):1 -4.