三维激光扫描仪单点精度的检验与分析
2013-04-14韩三琪
韩三琪
(宁波市轨道交通集团有限公司,浙江宁波 315000)
1 概述
地面三维激光扫描技术是三维数据获取与场景建模技术中最新的一种,兴起于20世纪90年代。它采用高精度逆向三维建模及重构技术,以获取研究目标的三维坐标数据和数码照片的方式,快速获取大型实体或实景等目标的三维立体信息,通过计算机重构其3D数据模型,再现客观事物真实的形态特性[1]。该技术为快速获取空间数据提供了有效手段,是继GPS技术以后的又一项测绘技术新突破。
由于激光扫描仪问世时间短,而且结构复杂,现有的测绘仪器检验方法无法直接用来检定地面激光扫描仪,因此仪器的性能,数据的质量和可靠性以及最终输出产品的质量和精度就无法完全保证,这对于仪器应用领域的拓展是个阻碍[2]。尽管很多的仪器厂商给出了仪器的一些性能指标,但由于没有统一的规格标准,这些指标并不一致,这让用户在选择仪器时有诸多不便。此外,仪器厂商给出的性能指标都是在理想实验环境下得到的,在实际工程应用中很难检验,从而导致无法了解仪器的真实性能。因此,需要对仪器的测量精度做进一步研究实验。此外,一些涉及到单点精度的研究更多是利用扫描仪易识别的反光片进行试验,与实际应用中的一般扫描对象存在较大差别,从而导致试验的数据与实际不符[3]。
利用与实际应用中反光强度相当的纸片代替反光片进行扫描试验[4],将扫描仪的单点定位坐标数据和同等条件下全站仪观测到的靶标数据进行比较,以全站仪取得的点位坐标为基准,检验扫描仪在这种常规测量中单点定位的精度。主要工作如下:
(1)设计实验方案,获得地面三维激光扫描仪和相同条件下全站仪的测量数据。
(2)实验数据分析,通过坐标转换将全站仪和扫描仪的坐标转换到同一个坐标系中,从扫描仪得到的点云数据中提取出每一个靶标的靶心坐标,并与转换后的全站仪坐标进行对比,评定地面三维激光扫描仪的单点定位精度。
2 地面三维激光扫描仪检验试验与数据处理
2.1 试验目的
检测试验目的是通过设计合理的方案将地面三维激光扫描仪测量得到的坐标数据与相同条件下全站仪的测量结果进行比较,以全站仪的测量数据为基准,对地面三维激光扫描仪的单点测量精度进行试验与分析。本文实验以距离为10 m的单点测量为例,研究三维激光扫描仪的测量单点精度。
2.2 试验场地
本次试验在某大学试验场中进行,试验场内光线良好,室温约为25 ℃。试验场地各条件稳定,试验时无人员走动。
2.3 实验设备
以RIEGL公司VZ-400地面三维激光扫描仪为例,其参数指标如表1、表2所示。
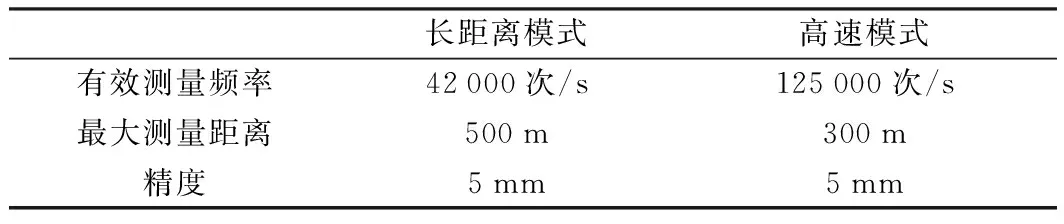
表1 VZ-400地面三维激光扫描仪的基本参数指标

表2 Leica 1202全站仪基本参数指标
2.4 实验步骤
(1)在试验场扫描仪对面及两侧垂直墙面上贴上6个反光片作为靶标,用于后期全站仪和地面三维激光扫描仪的坐标转化基准点。6个反光片均匀分布,反光情况良好。
(2)在一块表面光滑,颜色略深的平板上布设12个靶标点,其中四个角的靶标点用反光片,其他的靶标点用自制的白色纸片代替,靶标点在平板上分布均匀。
(3)将制作好的上述平板置于三维激光扫描仪的正前方墙面处,靠墙摆正并固定好。要保证平板上的每一个靶标都能被地面三维激光扫描仪扫描到,且成像良好。同时,平板应置于步骤1的6个坐标转化基准点中央,保证坐标转化数据的可靠性。
(4)在离平板正前方约8 m处架设地面三维激光扫描仪,接通电源,开机预热并对中整平,用数据线连接计算机,利用扫描仪自带的Riscan Pro 软件控制整个扫描过程。
(5)全站仪测量:在地面三维激光扫描仪旁边架设全站仪,对中整平,对平板上的12个靶标点以及墙面上的6个基准点进行观测,盘左盘右各观测一次,在手簿上记录下18个点的靶心坐标。
(6)核对地面三维激光扫描仪和全站仪的测量结果。
2.5 数据处理与分析
(1)坐标转换
坐标转化采取七参数法,利用扫描仪和全站仪得到的4个反光片基准点的坐标,求出七个参数的值,进而利用七参数模型将8个目标点的坐标转化到同一坐标系中。
(2)靶心坐标提取
靶心坐标提取原理如图1,已知点为实验平板上四周的四个坐标转换基准点,未知点为需要确定靶心坐标的白纸片。靶心坐标的确定:根据最小二乘原理,将未知点的约300个坐标数据依次计算与四个已知点的距离平方,最后得到四个距离平方和,将这个平方和与同样方法计算得到的全站仪测得坐标的平方和相减后求出其差之和,取和的值最小的点坐标作为扫描仪扫描得到的靶心[3],其坐标公式如下

(1)
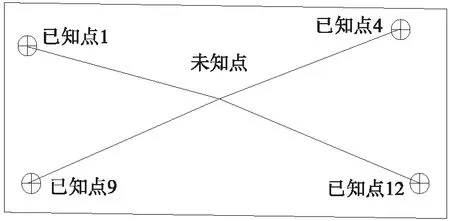
图1 靶心坐标提取原理示意
(3)靶心坐标改正
计算得到的靶心坐标与实际值有偏差,在与全站仪做对比之前需要对其进行坐标改正,以消除系统误差带来的影响。
实验得到的数据经过坐标转换、靶心坐标的提取之后,得到坐标如表3所示。
由于X、Y、Z坐标差均在一个固定的数值附近,特别是Z坐标很明显,考虑到可能存在较为明显系统误差,于是尝试进行坐标改正。根据改正数ΔX、ΔY、ΔZ,取改正数ΔX=0.002 m,ΔY=0.004 m,ΔZ=0.079 m,则改正后的靶心坐标如表4所示。

表3 扫描仪和全站仪测量的靶心坐标 m
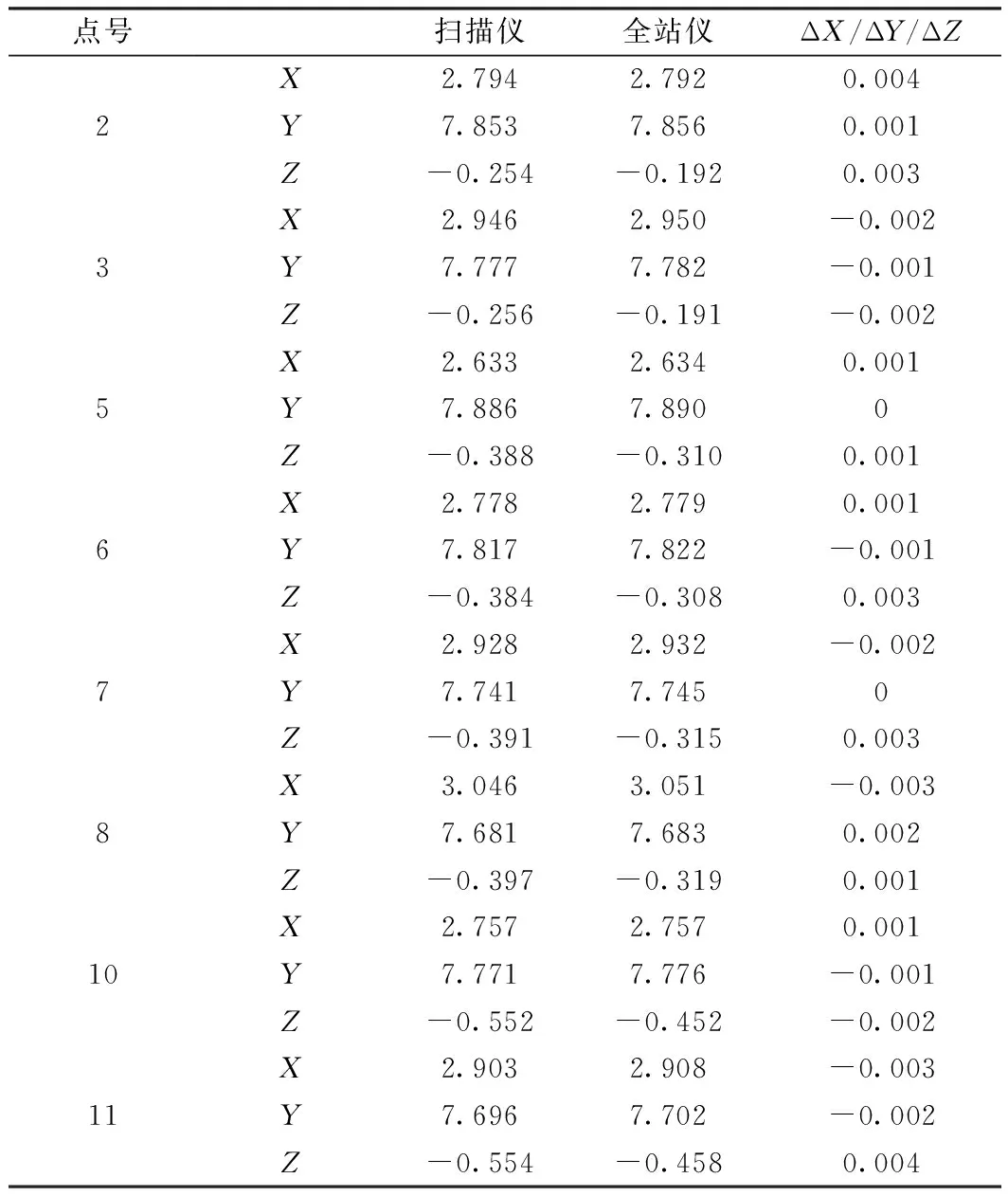
表4 改正后的靶心坐标差 m
(4)精度评定
从上面数据可以看出,经改正后的XYZ三项坐标差值均在4 mm以内,计算其中误差
距离中误差为
从以上计算可以看出,每个点的三维坐标差在4 mm以内,在三维激光扫描仪的标称精度范围内(5 mm),且三维坐标的中误差均小于标称精度,达到了实验的目的。
3 结束语
围绕地面三维激光扫描仪的精度进行检验试验与分析,设计了较为合理的实验方案,通过RIEGL公司的VZ-400地面三维激光扫描仪和Leica公司的 1202 型全站仪在相同条件下对同一批靶标进行测量,在经过坐标转化后,以全站仪的坐标数据为准,比较三维激光扫描仪的坐标测量精度。
通过计算两者的坐标差可以看出,在消除系统误差产生的影响之后,地面三维激光扫描仪的测量精度在测量距离为10 m左右时,可以达到4 mm以内,坐标中误差可以控制在3 mm以内。证明了三维激光扫描仪的在此距离测量情况下,单点精度与其标称精度相差不大。同理,运用本文的方法,可以在不同距离,不同角度等环境下对三维激光扫描仪的单点扫描精度进行评定,为实际生产中提供精度参考。
[1]官云兰.地面三维激光扫描仪数据处理中的若干问题研究[D].上海:同济大学土木工程学院,2008
[2]马力广.地面三维激光扫描仪的分类与应用[J].地理空间信息,2005,3(3):34-36
[3]徐进军. 地面三维激光扫描仪应用综述[J].工程勘察,2008,22(3):26-27
[4]郑炎兵,陈志扬.地面三维激光扫描仪的应用[R].广州:广州勘察设计研究院,2008
[5]刘春,张蕴灵,吴杭彬. 地面三维激光扫描仪的检校与精度评估[J].测绘通报,2011(4)