大型车辆超声波过弯雷达
2013-04-13石小平
石小平 唐 刚
(上海海事大学,中国 上海 201306)
0 前言
过弯雷达[1]是提醒驾驶员在转弯时道路交通环境中存在的安全隐患,以便提前做好准备,避免交通事故发生。大型车辆在过弯时由于其前后轮所运行轨迹不一致,会产生一个很大的内轮差[2],甚至可达到2米,极易形成大型车辆司机的“视觉盲区”,发生交通事故的可能性也越大。
然而,现在汽车的价格也越来越低,这就限制了汽车过弯雷达不能有太高的制造单价,这就要求汽车过弯雷达必须具有价格低廉,结构简单,稳定可靠,操作方便等优势。因此对汽车过弯雷达的信号源要求就特别严格。在对比红外、激光、超声和电涡流等测距方式[3]后,发现超声波测距具有传播时间容易检测,发射强度易控制,易于定向发射,且不受电磁干扰等优势。因此超声波测距[4]作为汽车过弯雷达的测距信号最为理想。
1 测距系统设计
超声波测距的原理是渡越时间法:即S=VT/2,其中V是超声波在该环境下的传播速度(V=331.4m/s,t为摄氏温度值),T 是发送到接受所需时间,S即为测量距离。
系统工作原理是,首先单片机STC89C51RD通过程序控制发射出40Khz(传播效率最好)的方波信号,经超声波发射电路放大后通发射探头发出超声波。超声波经障碍物阻拦后反射回来,再被接收探头接收。然后在接收模块中经放大、滤波处理后形成一个电信号传送于单片机,读出发送到接受之间的时差T,再由系统计算距离S,最后将S送至LED显示输出。图1为超声波测距系统的构成。
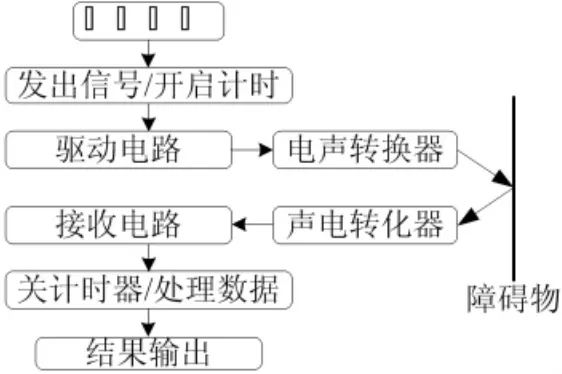
图1 超声波测距原理
2 转弯报警值的分析计算
2.1 大型车转弯路径分析
如图2是大货车的转弯路线。没有轮差的转弯应当是前后轮转弯半径是一致的,但大型车在转弯时会有一个很大的内轮差,内轮差即车辆转弯时的前内轮的转弯半径与后内轮的转弯半径之差。图2中所标示的前内轮与后内轮的行进路线形成的区域为最危险区域。所以先要对这段距离做计算。车辆在行驶过程中,对周围物体的碰撞情况可以分成两类:一类,是车辆撞上了静止的物体;另一类,则是撞上移动中的物体。对于静止的物体,当其距离车过近已近进入车辆转弯时的内轮差区域,若驾驶员不采取措施则一定会撞上物体。图2中a段的左边区域表示的是大型车将会撞到的静止物体的部分。超出a段后,在a和b线段所夹的区域内,有物体以一定的速度向前方行驶时,当其比车辆早到达危险区域,则也会发生碰撞事故,因此也应当将这段距离视为危险区域。所以现在就要对静止物体的危险距离a和移动物体的危险距离b做计算,a与b之和就是预警距离。
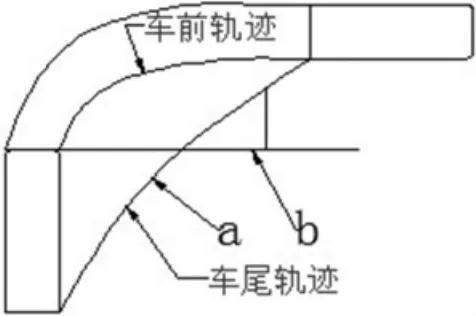
图2 大型车转弯路径图
2.2 车辆报警值计算
1)静止物体安全距离的计算
物体不进入行驶车辆的内轮差范围内,则不会产生碰撞事故。如图3静止物体安全距离计算图即是等效转弯路径分析,在此将大型车辆转弯时其前轮转弯角度设置为固定值θ,由图可知,车辆在转弯时其前内轮半径R与后内轮半径r之间所夹的区域即是静止物体危险区域。静止物体必须远离行驶车辆S才能避免碰撞上。
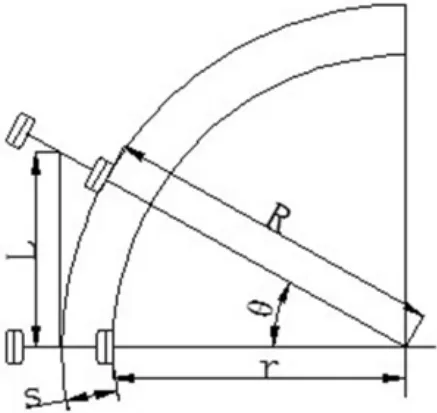
图3 静止物体安全距离计算图
如公式1,其中L为车辆前后轴距,θ为车辆前轮的转弯角度(一般车辆转弯角度范围为0≤θ≤40°)。由公式1可知化简为则可知当θ=40°时,S取得最大值。

2)运动物体安全距离的计算
图4是移动物体安全距离的等效计算图,图中A点为汽车位置,B点为距离汽车S的移动物体的起始位置,当时间保持一致时,若移动物体相比汽车后到达C点,那么距离S为安全距离。为简化计算模型,将汽车前轮转向角度设置为定值。由此可以知道汽车转弯半径,其计算公式如公式2所示。
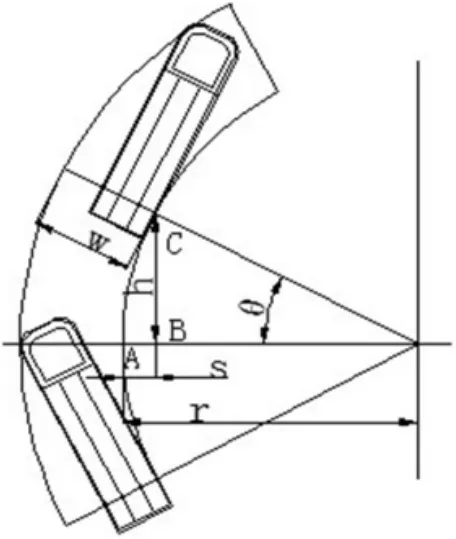
图4 移动物体安全距离计算图

L——大型车辆的前后轴距
d——车辆宽度
w——车道宽度
r——汽车的转弯半径
车辆和移动物体起始位置分别在线段AB两端,由图中可知只要在C点大车车尾较移动物体先通过,则不会发生事。故在该问题中,对于移动物体来说有h>v2t,如公式3所示;对车辆来说有故rsin,如公式4所示。

s——移动物体远离汽车的安全距离
v1——汽车行驶速度
v2——移动物体的移动速度
t——行驶时间
移动物体的安全距离计算时,车辆的参数选择为,轴距L=6米长,d=2米宽大型货车作为目标车辆,道路宽度选择国内标准w=3.5米宽,大型车速度选择为v1=20m/s,移动物体的速度选择为v2=5m/s。移动物体的速度选择速度较快的电瓶车的例(速度越快其发生事故可能性高,作为事故评价依据更可靠)。采用上述方法可求得静止物体的安全距离S=2.16米。移动物体的安全距离S=2.16+1.95可知轴距为6米的卡车和运动物体的报警距离为4.1米。为了确保安全,允许该值有一个小的溢出,因此可将此值设置为报警距离。
3)仿真研究
首先设置系统报警值,这里为方便操作,将预警值设定为4m,因此当进入4m范围内的障碍物应当报警。实验中利用简易的障碍物,分别将其与移动物体的距离设定如表1,利用超声波测距模块模拟车辆运行环境,验证其是否能正常测距和报警,并在报警重置后能否重启工作。试验结果如表1。

表1 试验中系统状态
如上试验可知,当物体在安全区域外移动时,警报没有响起,系统正常工作。当移动物体进入危险区域后,系统发出警报,直至报警手动解除后系统正常运行;当有物体再次进入预警范围后,系统再次报警。试验达到预期目标。
[1]Michael Sivak,Paull.olson,and Kenneth M.Farmer.Radar-measured reaction times of unalerted drivers to brake signals[J].Perceptual and Motor Skills,1982,Volume 55,pages 594-594.
[2]Guan Xin,Wang Jing WU,Gao Zhen hai.Vehicle adaptive cruise control system based on optimal preview acceleration decision making[J].Jounral of Jilin University(Engineering and Technology Edition),2004,34(2):189-193.
[3]李晓霞,李百川,侯德藻,等.汽车追尾碰撞预警系统开发研究[J].中国公路学报,2001,14(3):93-95.
[4]鲍吉龙,应延治,赵洪霞,等.基于DSP技术的汽车防撞雷达[J].微计算机信息,2006,22(2):188-190.