日本机器人技术专利介绍
2013-04-02鲁棒
鲁棒
【发明名称】机器人以及机器人制造方法
【专利编号】JP 2013-27939 A
【申请人】安川电机株式会社
【公开日期】2013年2月7日
【解决课题】同时实现轨迹的高精度化和移动速度的高速化
【解决手段】在机器人以及机器人制造中,轨迹的高精度化和移动速度的高速化是相互对立的两个技术指标。为了解决以上课题,机器人由多关节机械臂、机械臂关节上的减速器和电动机组成,减速器所具有的刚性,相对在多关节机械臂中给定代表位置上的弯曲量要小,电动机在驱动减速器时,所具有的转动惯量和负载转动惯量基本相同。
【选择附图】实施案例中机器人结构的侧视图。
【专利内容简介】
本发明是机器人以及机器人制造方法的提案。机器人由多关节机械臂和设置在各个多关节机械臂上的减速器组成。该机器人的特征是:
减速器所具有的刚性,令其相对在多关节机械臂中给定代表位置上的弯曲量要小。减速器的刚性指的是转矩刚性和扭转刚性。设置在关节上的电动机在负载减速器时,该电动机的转动惯量和负载方的转动惯量大体相同。各个机械臂关节上设置有装配部件,在装配部件上能够随时更换减速器或者电动机。

具有多关节机械臂机器人制造方法的特征是,机器人的制造方法包括三个工序,即选定工序、取值工序和检验工序。选定工序为:从接近多关节机械臂前端部位的关节开始,逐次地选定设置在多关节机械臂关节上的减速器和电动机;取值工序为:给前工序选定的减速器和电动机,按多关节机械臂上所确定的代表位置的弯曲量,分别获取3维坐标系中的各维的取值;检验工序为:检验前工序所获取的值是否分别小于多关节机械臂目标精度对应的阈值。
【发明名称】机器人的机械臂机构以及机器人
【专利编号】JP 2013-49128 A
【申请人】安川电机株式会社
【公开日期】2013年3月14日
【解决课题】使机器人小型化。
【解决手段】本发明实施形态中的机器人机械臂组件具有固定基座、第1机械臂部、第2机械臂部、电动机、第1传送带、第2传送带、中转部件。第1机械臂部通过第1减速器和固定基座连接,第2机械臂通过第2减速器和第1机械臂连接。而且,第2传送带将电动机的驱动力传递给中继部件,第1传送带通过中继部件将电动机的驱动力传递给第1减速器。
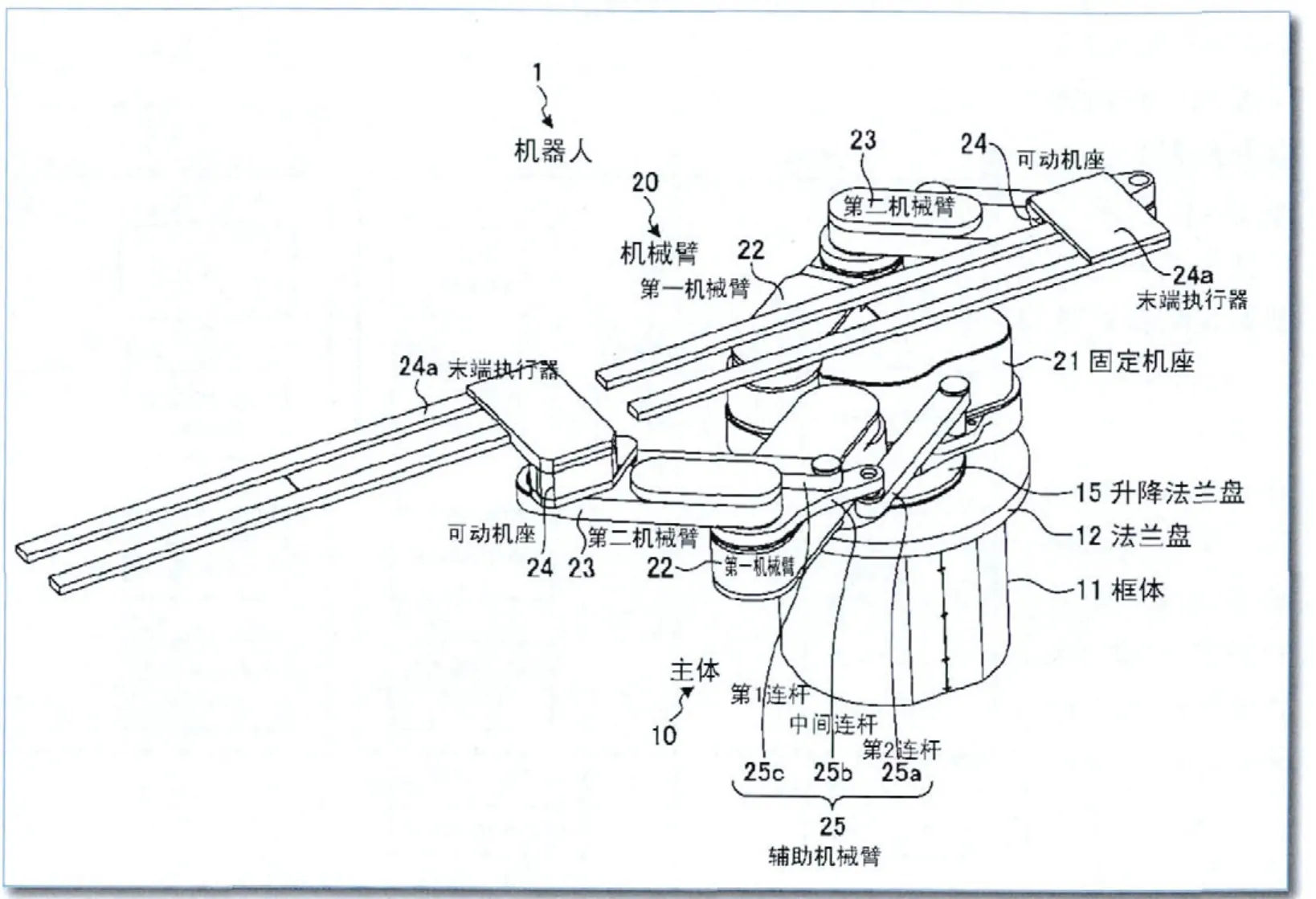
【选择附图】实施形态中机器人模型的斜视图。机器人1是具有在水平方向上可以伸缩的二个机械臂组成的水平多关节机器人。具体地说,机器人1由主体部10机械臂单元20组成。
【专利内容简介】
本发明是有关机器人机械臂的机构和机器人的改进提案,以求得机器人结构的小型化。特别是用于玻璃板或半导体硅片传送的机器人,因为要工作在低压状态的真空工作室内,而机器人的小型化能够减少真空工作室的空间,便于保持低压真空状态。
本发明机器人机械臂的组成部件和特征如下。
机械臂由以下部件组成:第1部件;通过第1减速机以能够转动的方式和第1部件连接的第2部件;通过第2减速机能够以转动方式和第2部件连接的第3部件;产生驱动力的驱动部;将驱动部的驱动力传输给第1减速机输入轴的第1传输部件;将驱动部的驱动力传输给第2减速机输入轴的第2传输部件;以及沿与驱动部输出轴平行的轴线为中心、能够自由旋转的中继部件。其特征是,第1传输部件或者第2传输部件将驱动部的驱动力传输给中继部件,通过中继部件将传输来的驱动力传输给第1传输部件或者第2传输部件其中的另一个部件。第1减速机的输入轴和第2减速机的输入轴相互旋转方向相反,而且是在不同高度上重叠设置的,驱动部的输出轴是在第1减速器或第2减速器输入轴的上方设置的。其机械臂的结构具有和驱动部输出轴平行轴为中心能够旋转的第2中继部件,以及相对第2中继部件传输驱动部驱动力的第3传输部件,第1传输部件或者第2传输部件通过第2中继部件将第3传输部件传来的驱动力传输给中继部件。在第2部件内部设置的保持大气压的保存部内,至少保存有驱动部、第1减速机、第2减速机以及中继部。第2部件通过一个闭塞的盖子与外部连通。机械臂具有能够与第3部件以旋转方式连接的第4部件,以及在第2部件和第3部件旋转时限制第4部件旋转的连杆机构。机器人机械臂能够设置在保持低压状态的工作室内。
【发明名称】分布式控制系统
【专利编号】JP 2013-10165 A
【申请人】本田技研株式会社
【公开日期】2013年1月17日
【解决课题】本发明是关于机器人等移动体中分布式控制系统的技术,已成功地应用在双足行走机器人ASIMO中。在本发明提供的分布式控制系统中,移动体内的控制对象或副控制单元能够很容易地增加或减少。
【解决手段】分布式控制系统400的主控制单元410由以下几个部分组成,存储控制对象430和赋予控制对象430的地址之间的关系的第一存储部411、生成控制对象430各个按地址顺序排列的控制数据的控制数据生成部412和采用广播方式发送控制数据的控制数据发送部414。副控制单元420由以下几个部分组成,存储和副控制单元420对应的控制对象430的地址的第二存储部421、基于第二存储部421存储的地址获取各个控制数据的获取部422和控制对象控制部423。
【选择附图】主控制单元和副控制单元结构框图。
【专利内容简介】
本发明是指对移动体中存在的多个控制对象进行分布式控制的分布式控制系统,该系统由主控制单元和多个副控制单元组成。主控制单元的功能是针对移动体的控制进行运算处理,多个副控制单元的功能是,与主控制单元进行控制数据通信,基于这些控制数据对一个以上的控制对象施行驱动控制。
主控制单元由第一存储部、控制数据生成部和控制数据通信部组成。第一存储部记忆与多个副控制单元对应的控制对象的地址,由控制数据生成部产生按地址顺序对应各个控制对象的控制数据,控制数据通信部以广播的方式向多个副控制单元发送控制数据。
各个副控制单元由第二存储部、控制数据获取部和控制对象控制部组成。第二存储部记忆对应该副控制单元控制对象的地址,由各个控制数据获取部,基于第二存储部的地址获取对应各个副控制单元控制对象的各个控制数据,由控制对象控制部基于获取的各个控制数据对相应的控制对象实施驱动控制。
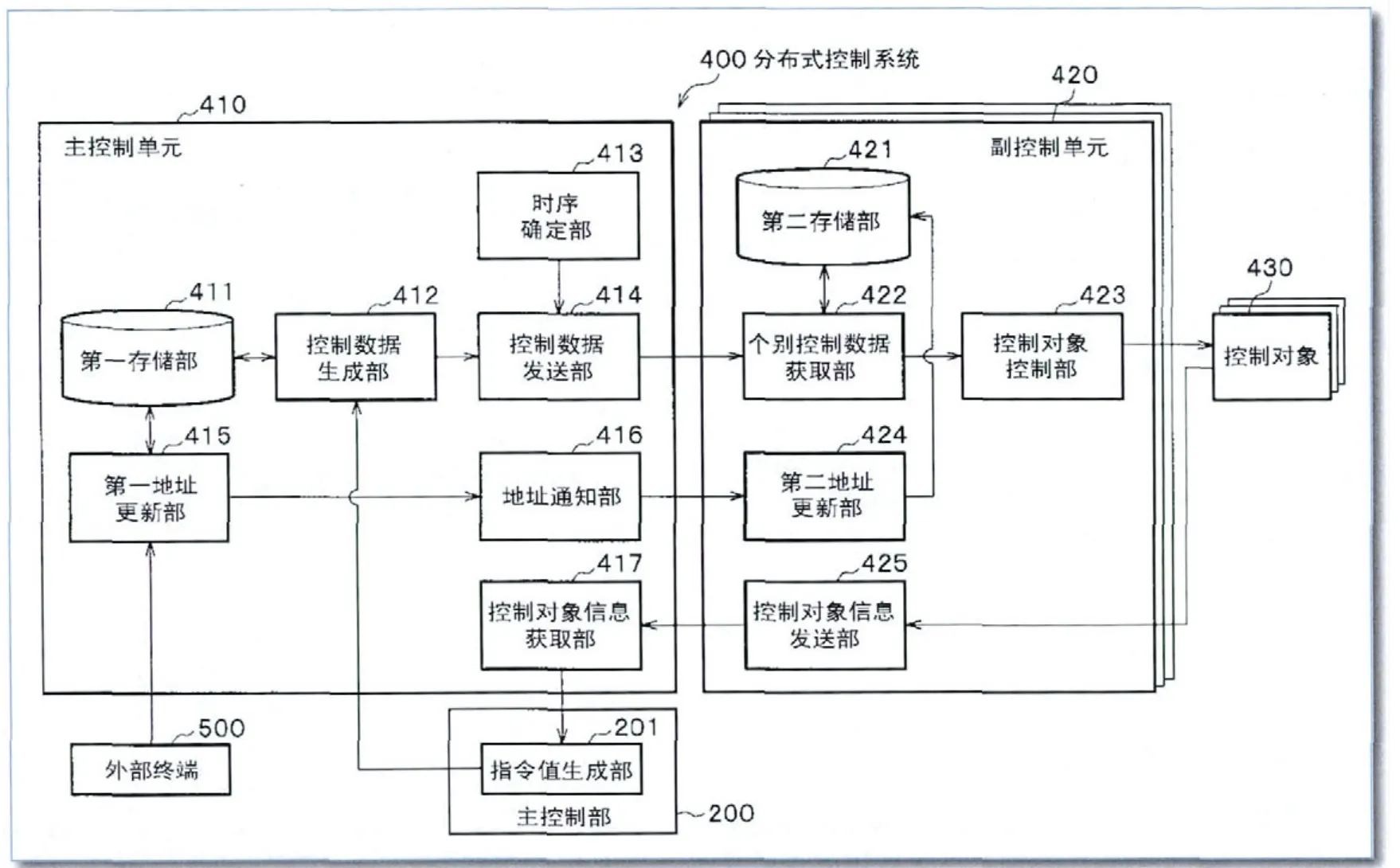
在主控制单元内还设置有第一地址更新部和地址通知部,第一地址更新部的功能是对应控制对象或者副控制单元数量发生增加或者减少时更新第一存储部内的地址信息,并由地址通知部将更新后的地址通知给副控制单元。在副控制单元中设置有第二地址更新部,基于所得到的更新地址对第二存储部的记忆地址进行更新。
本发明所指的移动体是能够自主移动的机器人,所指的控制对象是驱动关节运动的电动机。