基于模糊自适应PID控制的定位系统设计
2013-03-31丛自龙袁朝辉杨芳
丛自龙,袁朝辉,杨芳
(1.西北工业大学自动化学院,陕西西安710129;2.解放军63655部队,新疆乌鲁木齐841700)
步进电机作为一种特殊类型的电机,不同于直流电机和交流电机。在控制方式上,步进电机接受的是脉冲信号的控制,不需模数转换,能够直接将数字脉冲信号转化成为角位移。步进电机在控制方法上的显著特点,在数字化制造时代发挥着重大的作用[1]。
定位控制中采用位置开环控制,往往很难达到高精度定位的要求,所以位置闭环控制是定位控制中普遍采用的方法。工业控制中,对电机一般采用PID控制方法,但是传统的PID控制器,对于像步进电机这种参数时变的非线性被控对象,控制效果往往不是特别理想[2]。
鉴于模糊控制相对于线性控制方法的优势,逐渐发展出通过模糊控制方法调整PID参数的模糊参数自整定PID控制方法。该方法综合了两种控制策略的优势,同时消除了模糊控制难以达到较高的稳态精度的缺点,非常适合应用于步进电机组成的定位系统中。
作者以步进电机的位置定位为研究对象,设计了基于模糊控制理论的模糊自适应PID控制方法,该方法以误差e和误差的变化ec作为输入,利用模糊规则在线对PID参数进行修正以满足不同时刻的e和ec对PID参数自整定的要求。仿真试验表明,该方法有着较好的控制效果。
1 两相混合式步进电机的数学模型
两相混合式步进电机简化的磁网络模型如图1所示,模型中忽略了定子极间的漏磁、永磁体的漏磁回路、径向和轴向轭部磁路的磁阻[3]。
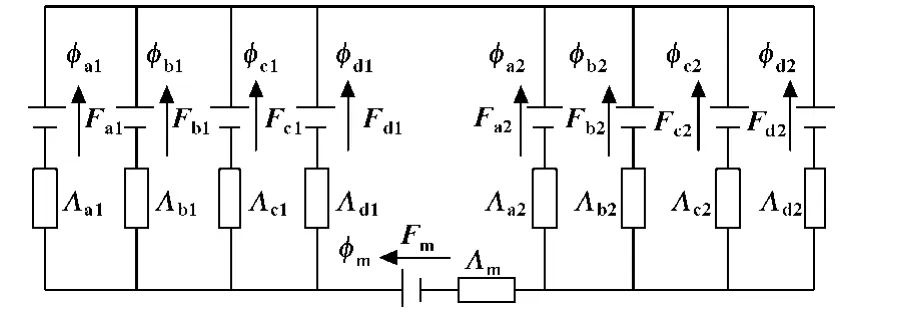
图1 两相混合式步进电机简化的磁网络模型
图中:Λa1、Λb1、Λc1、Λd1为 I端铁心相应极的磁导;Λa2、Λb2、Λc2、Λd2为II端铁心段相应极的磁导。这些磁导参数都是转子位置角的周期函数。Λm为永磁体内部磁导,Fm为永磁体磁势。
取定子a极上小齿的中线为转子位置角的参考坐标,以转子小齿中心线与参考坐标间的夹角表示转子的角位置θ(电角度);即当a极下定转子齿对齿时,θ=0,不计周期性磁导的二次以上各次谐波分量,可得
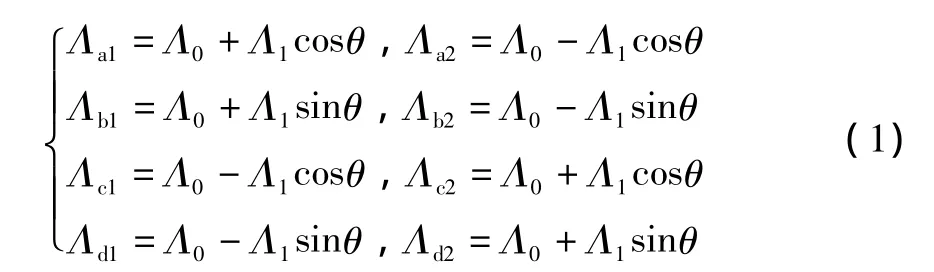
式中:Λ0为一端铁心段一相两个极齿层磁导的平均分量;Λ1上述齿层磁导的基波分量。
由式 (1)可得出A、B相的自电感LA、LB和互电感LAB。

两相混合式步进电机的电压平衡方程为:

两相混合式步进电机的电磁转矩为:

两相混合式步进电机的转矩方程为:

式中:J为转动惯量;B为黏滞摩擦因数;TL为负载转矩。
两相混合式步进电机的运动方程为:

式(5)—(8)构成了两相混合式步进电机的数学模型。
2 定位系统设计
2.1 总体设计
(1)硬件设计
文中所设计的步进电机定位系统的结构框图如图2所示。主控单元为一块DSP控制芯片,它通过串行通信端口接受主机发送的控制信号以及各个控制参数,此外它还对电机绕组电流采样值以及位置反馈进行处理,通过控制算法的计算,输出最终的控制信号。控制信号通过一定的逻辑综合、隔离,最终控制功率驱动电路控制电机按照PC机要求的参数运行。
作为精确定位系统,步进电机原有的步进角度远远无法达到控制精度要求,因此细分驱动控制是必不可少的。首先细分驱动控制可以进一步减小步进电机的步进角度,提高系统精度;同时,较高的细分精度也可以减小电机转矩的脉动,使电机运行更加平稳。文中采用SPWM正弦驱动控制,细分过程也由DSP来实现。

图2 步进电机定位系统结构框图
信号检测与调理电路主要是接受电机绕组电流的采样,将其进行适当的滤波和放大处理得到较为平滑的、反映绕组电流波形的电压波形信号,以供DSP的A/D转换器进行采样转换为数字量。
位置检测部分是定位系统中非常重要的部分,其工作性能直接影响到定位的精度甚至准确性。这里采用目前在高精度定位中较常采用的增量式光电编码器作为位置检测元件。光电编码器反馈的信号由于受到振动和传输过程中的干扰,在电机旋转时,发出的方波信号会出现许多毛刺,直接接到DSP中会引起误判断,所以需要通过一定的调理电路,将带有毛刺的光电编码器的位置信号整定为标准的方波脉冲信号,输入到DSP中。
DSP输出的信号还不能直接应用于功率管的控制,需要经过逻辑综合才能得到最终的功率管控制信号。逻辑综合的过程之所以没有放入到DSP中进行,是因为如果要DSP直接输出所需的控制信号,就要对其软件做较大的改动,这样就会增加软件运行时间,影响DSP运行的实时性。而且多数控制信号要通过DSP的外设输出,通过软件很难达到预期的效果。而一个简单的逻辑综合电路 (常采用可编程逻辑器件),既可以降低DSP软件的复杂程度,又可以实现所需的功能。
(2)软件设计
控制软件主要分为三部分:DSP控制程序、逻辑综合程序以及上位机通信程序。文中软件编程的硬件抽象层的方法以及IQmath库主要依据TI公司已经定义好的头文件和外设编程实例。主要包括的文件有:
①C2812x C/C++Header Files and Peripheral Examples(SPRC097);
②IQmath C/C++Library v1.4d(SPRC087);
③Quadrature Encoder Pulse Driver(SPRC179)
DSP控制软件总体上由六部分组成,其结构如图3所示。程序在经过主程序的初始化过程后进入中断等待阶段。中断服务程序主要包括:串行通信中断服务程序、位置反馈中断服务程序、A/D转换中断服务程序和换相及转速控制中断服务程序。

图3 DSP软件总体结构
2.2 模糊自适应PID控制器
模糊自适应PID以误差e和误差的变化ec作为输入,利用模糊规则在线对PID参数进行修正以满足不同时刻的e和ec对PID参数自整定的要求,控制器结构如图4所示。

图4 模糊自适应PID控制器结构图
将偏差的比例P、积分I、微分D通过线性组合构成控制量,对被控对象进行控制,所以称PID控制器。其算式为:

其离散表达式为:

从系统稳定性、响应速度、超调量和稳态精度等方面来考虑,KP,KI,KD3个参数的作用如下:
(1)比例系数KP的作用是加快系统的响应,提高系统的调节精度。但是如果该参数调得过大,就会形成过快的响应,这样容易产生超调,甚至会导致原系统的不稳定;若是该参数调得过小,就会使响应速度缓慢,从而延长调节时间,则会使系统的动态和静态特性变坏。
(2)积分系数KI的作用是消除系统的稳态误差。如果该参数调得过大,在响应初期就会产生积分饱和,引起较大的超调;如果该参数调得过小,则难以消除静差,影响系统精度。
(3)微分作用系数KD的作用是改善系统的动态特性。作用是在响应过程中抑制偏差向任何方向的变化,对偏差变化进行提前预报。但是如果该参数调得过大,会影响系统的动态性能,系统会对误差非常敏感,降低系统的抗干扰能力。
模糊规则主要由3部分确定:模糊语言变量、各语言变量隶属函数、规则建立。
由位置给定与位置反馈的差值,即位置误差结合比例、积分、微分3个参数,计算出控制器的输出u。即输入为位置偏差E和位置偏差的变化率EC,输出为PID 3个参数的变化量ΔKP、ΔKI、ΔKD。
根据模糊控制以往经验,当语言变量小于7个时,输出精度较低且具有较明显的振荡,而当语言变量高于7个时,精度无明显提高且增加了计算时间,故取7个输入输出的语言变量[4],对应论域为[-6,-4,-2,0,2,4,6]。隶属函数如图5所示。

图5 隶属函数
模糊条件语句格式为 if E=A&EC=B,then ΔKP=X&ΔKI=Y&ΔKD=Z[5]。结合在不同偏差和偏差变化率时对PID 3个参数的要求,可以得出以下控制规则,如表1所示。

表1 模糊控制规则表
通过使用加权平均模糊判决法,模糊控制器输出ΔKP、ΔKI、ΔKD后,根据式 (11)计算出PID控制器经模糊整定后的3个控制参数KP、KI、KD。其中KP0、KI0、KD0为常规的PID控制率中得到的PID参数,以此作为参数模糊自整定PID控制器参数的初始值。

图6 KP模糊控制规则曲面图

KP、KI、KD的模糊控制规则曲面图如图6—8所示。

图7 KI模糊控制规则曲面图
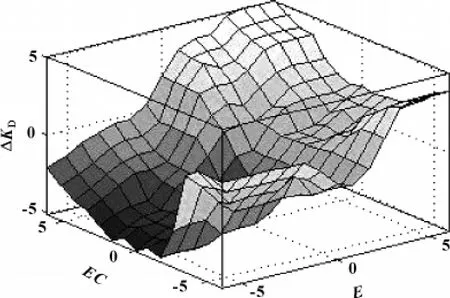
图8 KD模糊控制规则曲面图
模糊参数整定部分模型如图9所示。

图9 模糊参数自整定模块
3 仿真及实验结果分析
根据前面建立的步进电机数学模型进行仿真试验,设定的定位角位移为10 rad,图10表示两相混合式步进电机定位系统的仿真模型。
图11表示分别采用PID控制和模糊自适应PID控制得到的角位移曲线。

图10 定位系统仿真模型图

图11 角位移仿真曲线
从两种控制器的控制效果对比可见:在起始阶段,模糊自适应PID控制的响应速度明显高于PID控制。这是因为在起始阶段,位置偏差较大,取较大的KP和较小的KD,以使系统响应加快。这造成了起始阶段模糊自适应PID控制下的系统速度较高,此过程加速了位置偏差的减小。而在平衡位置时,采用模糊自适应PID控制的系统抖动较小,这主要是因为模糊自适应PID在位置误差较小时调整3个参数,使系统响应具有较好的稳态性能,KD的恰当取值避免在平衡点附近出现振荡。模糊自适应PID控制下的曲线显得较为平滑。
4 结论
通过分析两相混合式步进电机模型,可以得知:两相混合式步进电机是参数时变的非线性被控对象。因此,在选择控制方法时,模糊自适应PID控制较传统PID有较大优势。在加入模糊控制对P、I、D的参数进行整定之后,系统的响应速度加快,在平衡位置的抖动较小,有利于提高系统的定位精度。
【1】史敬灼.步进电动机伺服控制技术[M].北京:科学出版社,2006.
【2】史敬灼,徐殿国,王宗培.模糊控制步进电机位置伺服系统[J].电工技术学报,2001,16(3):20-23.
【3】BELKHOUCHE Fethi,MUZDEKA Slobodanka.A Linearized Model for Permanent Magnet Stepper Motors[C]// The 29th Annual Conference of the IEEE Industrial Electronics Society,2003:301-305.
【4】章卫国,杨向忠.模糊控制理论与应用[M].西安:西北工业大学出版社,1999.
【5】TREESATAYAPUN C.Fuzzy Rules Emulated Network and Its Application on Nonlinear Control Systems[J].Applied Soft Computing,2008(8):996-1004.
【6】杜娟,田锡天,朱名铨.一种基于STEP-NC的智能化CNC体系结构的研究[J].机床与液压,2005(1):19-21,67.
【7】张红强,章兢.基于混沌优化的数字PID控制器及其应用[J].机床与液压,2005(1):137-139,174.
【8】张东瀛,郭咏虹,王斌.基于模糊PID的自动配料系统控制研究[J].机床与液压,2005(1):135-136,148.
