直升机旋翼动力学综合实验系统设计
2013-03-31刘湘一胡国才贾忠湖柳文林
刘湘一,胡国才,贾忠湖,柳文林
(海军航空工程学院飞行器工程系,山东烟台264001)
直升机旋翼系统是直升机升力的来源,它的性能很大程度上决定了直升机的性能[1]。由于旋翼/机体耦合动力稳定性问题的复杂性,研究过程中新建立的分析模型和软件必须有可靠的实验数据验证其准确性。为此,国外从20世纪80年代起研制了专门的模型实验装置,美国贝尔公司和英国韦斯特兰公司都曾进行过旋翼/机体耦合动力稳定性的模型实验研究[2]。影响最为广泛的是美国陆军技术研究实验室与NASA联合进行的一系列旋翼与机体耦合稳定性的模型实验,其实验结果被大量引用[3-6]。国内已有一些直升机地面共振及悬停空中共振的分析模型,有的模型及软件已利用国外公开发表的实验数据进行了部分验证,但由于上述国外数据的局限性,未能得到全面验证。目前,国内有些研究机构建设有一些旋翼动力学实验台,但一般都是针对某个课题设立实验台,功能较为单一[7-8]。
直升机旋翼动力学综合实验系统将影响直升机动力学性能的问题综合起来,实现多种实验功能,将有限的经费发挥最大的效益。
1 主要功能
直升机旋翼动力学综合实验系统主要实现以下功能:
(1)直升机动力学实验
能够完成旋翼模态特性、旋翼气弹响应、旋翼动部件载荷、旋翼动平衡、直升机地面共振、空中共振等10多项实验研究。
(2)旋翼系统的机械故障诊断实验
通过旋翼和机体的振动测试信号,分析旋翼系统的故障类型、故障部位、严重程度等,为研制直升机状态监视系统 (HUMS)进行必要的基础性实验研究。
(3)直升机动稳定性主动控制实验
直升机地面及空中共振动稳定性的主动控制技术,是近二十年来直升机界研究的一个热点[9-10]。作者已经开始了这方面的理论研究,已经在实验台设计时考虑了动稳定性主动控制的实验方案,可以进行稳定性主动控制实验研究。
2 系统组成
图1是直升机旋翼动力学综合实验系统的现场全貌,系统主要由以下几部分组成:(1)旋翼;(2)电机及转速控制部分;(3)旋翼操纵部分;(4)液压油源;(5)数据采集与分析部分(图2)。

图1 直升机旋翼动力学综合实验系统现场

图2 系统组成
2.1 旋翼
旋翼是实验台的核心部分,主要包括半铰接式金属桨毂、空心金属旋翼轴、自动倾斜器和4片复合材料桨叶。旋翼直径2 m,桨叶剖面采用NACA0012翼型、矩形直桨叶;旋翼最大转速1 000 r/min,在0~1 000 r/min内可以改变。采用液压或黏弹减摆器,减摆器一端与变距轴相连,另一端与桨毂相连,构成几何耦合的减摆器布局,减摆器上能布置轴向力传感器。
该实验系统采用了常见的环式自动倾斜器对旋翼进行操纵,操纵自动倾斜器不旋转环的是3个液压动作筒。自动倾斜器通过一个球面铰安装在旋翼轴的轴套上,动环与变距铰用可调变距拉杆连接,变距拉杆的轴端采用球铰,变距拉杆上可以布置压力传感器。桨毂采用 (由里到外)挥舞轴承、摆振柔性片、变距轴承的形式(图3)。
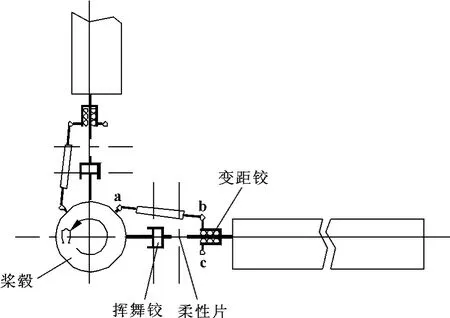
图3 旋翼系统桨毂示意图
用电机、集流环组成“模拟机体”,通过设计计算和最后的测试,确定整个系统的重心位置,将该重心位置作为万向铰中心。机体与基础之间用弹性元件或黏弹性元件连接,可以模拟起落架刚度和阻尼。
2.2 电机及转速控制部分
电机是旋翼的动力源,采用10 kW三相交流电机转速在0~1 200 r/min可连续调节,精度为±1 r/min。电机能在350~440 V的条件下稳定工作,具有过流、过压保护,连续工作时间大于30 min。
电机的转速控制部分用来实现电机的启动、停止和转速的控制,能感受并显示电机的转速,可对电机转速进行连续调节,调节精度1 r/min。
电机壳体与旋翼轴的轴套连接,电机轴为空心轴,内径φ25 mm,上端与旋翼轴用花键连接,下端与集流环的内环相连,带动集流环内环旋转。
2.3 旋翼操纵部分
旋翼操纵部分用于操纵旋翼总距和周期变距以及在实验时对旋翼进行激振。旋翼操纵部分包括3个动作筒、3个电液伺服阀、3个位移传感器、液压控制系统和相关附件(图4)。
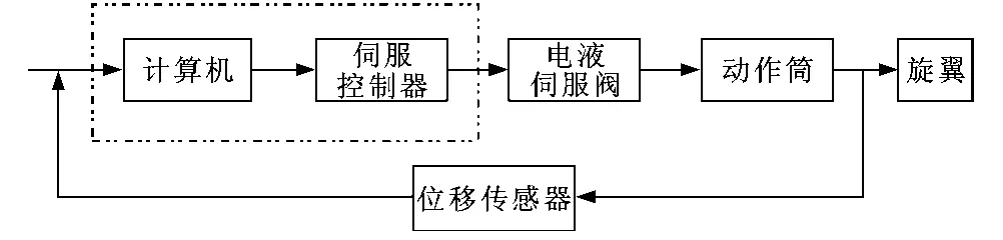
图4 旋翼操纵系统框图
选用的电液伺服阀频率范围0~30 Hz,频率精度为0.01 Hz;在各频率下,动作筒行程为-15~30 mm,激振时输出振幅不小于±1.25 mm,加速度能达到45 m/s2、动态输出最大力幅不小于85 N。
位移传感器用于反馈动作筒的位移信号给液压控制系统,位移精度0.080 mm。
液压伺服控制包括计算机、伺服控制器、D/A转换板等,用于接受位移传感器信号和发出控制信号对电液伺服阀进行控制。
操纵软件用Labwindows CVI编制,能够完成自检、参数调整、旋翼操纵、激振、扫频等功能,图形界面能够显示3个液压伺服动作器的输入和输出信号(图5)。
旋翼操纵控制软件内置的控制信号为正弦信号,能在0~30 Hz内发出不同幅度的正弦扫频信号。
控制软件能实现如下几种控制:
(1)3个作动筒同时输出相同幅度的静态位移;
(2)3个作动筒同时输出幅度各不相同的静态位移;
(3)3个作动筒同时输出同频率、同幅值及同相位的动态位移。
(4)各动作筒输出同频率、不同幅值、不同相 位差的动态位移。
2.4 液压油源
液压油源用于向旋翼操纵系统提供动力,额定工作压力为13.5 MPa、额定流量不小于25 L/min、绝对过滤度为3 μm,通过分油器同时为3个电液伺服阀供油。
具有压力显示、油温显示、油箱液位显示功能。为了保证安全,具有超温报警装置、低液位报警装置和污染度超标告警装置。使用HY-10航空液压油,能够通过自身的循环使油液污染度达到GJB-4206/A的标准。采用水冷的方式控制油温,能够在环境温度为-10~60℃内正常工作。
2.5 数据采集与分析部分
数据采集与分析部分用于完成对旋翼桨叶和机体振动量的数据采集、实时分析、数据存储、打印及传输等任务。其硬件系统包括传感器、集流环、A/D转换板、计算机以及相关的附件。
采用基于PXI总线的信号采集系统,将旋翼桨叶的挥舞、摆振、变距信号,桨叶应变信号,机体滚转、俯仰信号,减摆器载荷、变距拉杆载荷信号,旋翼转速信号,机体振动信号等经过预处理后转换为数字信号,与动态分析仪连接,进行数据分析。
在4片桨叶的挥舞及摆振柔性片上均贴有应变片以测量其挥舞及摆振弯曲应变。这些信号均通过穿过空心旋翼轴及电机轴的导线和集流环传给数据采集与处理系统。除此之外,还要测量旋翼的转速信号和一个方位角信号。
在“模拟机体”上沿纵向及横向安装加速度传感器,测量其纵、横向转动的角加速度。在约束“模拟机体”运动的弹性片上贴有应变片,由其弯曲应变通过标定可推出其纵、横向转动角度。
系统的数据采集、分析软件是基于NI LabVIEW平台编制的,具有使用简单,扩展性能好等特点。数据采集分析软件提供“功能模块”和“图形显示模块”(图6)。

图6 数据采集分析软件界面
功能模块包括数据采集模块、数据处理模块和数据保存模块。
数据采集模块完成对信号采集通道的配置和管理。数据处理模块对采集的信号进行处理,包括加窗函数、FFT变换、功率谱函数、频响函数等。数据保存模块提供对采集数据的自动保存。
图形显示模块为用户提供了方便灵活的图形操作界面,用户只需拖动需要观察的数据通道至图形显示区,即可观察该通道数据图线;同时,提供的Cursors功能,为用户提供了方便的查看和比较图线数据点精确值的功能。
3 结束语
构建了一套完整的模拟旋翼/机体耦合系统的直升机旋翼动力学综合实验系统,研制了旋翼操纵控制软件,实现了旋翼的变频率、变幅值、多通道的实时闭环控制,实现了旋翼动力特性的仿真,能够模拟直升机旋翼/机体耦合的各种状态和设置模拟故障。
该实验系统已应用于海军航空工程学院各层次的实验教学,解决了教学训练过程中直升机旋翼系统实验手段欠缺的难题,该系统还可应用于直升机部队的模拟排故、训练。依托该实验系统,取得了较好的教学科研成果,效果显著。
【1】航空航天工业部科学技术研究院.直升机动力学手册[M].北京:航空工业出版社,1991.
【2】RICKETTS Rodney.Experimental Aeroelasticity History,Status and Future in Brief[R].NASA Technical Memorandum 102651,1990.
【3】TONGUE B H.Response of a Rotorcraft Model with Damping Non-linearities[J].Journal of Sound and Vibration,1985,103(2):211-224.
【4】JOHNSON Wayne.Rotorcraft Dynamics Models for a Comprehensive Analysis[C]//The American Helicopter Society 54th Annual Forum,Washington DC,1998.
【5】ZHANG Xiaogu.Physical Understanding of Helicopter Air and Ground Resonance[J].Journal of the American Helicopter Society,1986,31(4):4-11.
【6】胡国才,向锦武,张晓谷.前飞状态直升机旋翼/机体耦合动稳定性分析模型[J].航空学报,2004,25(5):451-455.
【7】高亚东,张曾锠.直升机旋翼不平衡故障诊断试验研究[J].振动、测试与诊断,2009,29(2):214-216.
【8】王焕瑾,高正.高速直升机方案中旋翼自转状态的实验研究[J].空气动力学学报,2004,22(2):151-155.
【9】STREHLOW H,RAPP H.Smart Materials for Helicopter Rotor Active Control[C]//AGARD/SMP Specialist’s Meeting on Smart Structures for Aircraft and Spacecraft,1992.
【10】SAHASRABUDHE Vineet,GOLD Phillip J.Reducing Rotor-Body Coupling Using Active Control[C]//The American Helicopter Society 60th Annual Forum,Baltimore,2004.
