电磁导航式智能车控制系统研究
2013-03-30侯代坡孔琳琳韩致信
侯代坡,孔琳琳,王 烁,杨 成,韩致信
(1.兰州理工大学机电工程学院,甘肃 兰州 730050;2.安徽理工大学机械工程学院,安徽 淮南 232001)
0 引言
全国大学生智能汽车竞赛以汽车自动导航技术为背景,采用MC9SXS128微控制器作为核心控制模块,主要针对电磁导航方式中道路检测传感器模块的设计,以及软件去除零点漂移方法进行讨论;为检测引导线与车体的相对位置,传感器模块设计了6个基本检测单元,使基本检测单元均匀分布在车体的前方成一字排布。电磁导航技术相对于图像检测方式和光电检测方式而言,具有抗干扰能力强、精度和可靠性高的特点。传感器输出信号为连续的模拟信号,易于实现智能车巡线的精确控制,更有益于增进高校学生对智能车的研究与探索。
通过传感器检测信号值的大小,并进行比较,判断引线的初步位置,最后通过一系列算法得出其精确位置。建立智能车自动循线控制系统,使其具备自动识别、自动循线和车速自动调整等功能。
1 检测模块硬件设计
智能车对起始线的检测采用干簧管串联方式,使用串联方式可以提高检测精度和灵敏度,易于实现干簧管的对称布置。道路引线检测传感器的驱动电压和转向舵机的驱动电压都为5V,直流电机电压(电池两端电压)为7.2V。采用7805,7806或2940稳压芯片。电机驱动芯片采用BTS7960,2片同时使用,用于控制电机的正反转。
智能车导航采用的是20kHz不断变化的正弦交流电,该电磁波属于甚低频电磁波。采用电磁感应线圈方案,其原理简单、价格便宜、频率响应快和电路实现简单。
放大电路采用LC震荡电路检测交变磁场,弱信号经放大电路放大,再经检波电路的检波,得到直流信号传输给单片机A/D模块进行转换,如图1所示。探头采集到的信号为毫伏级正弦信号,因此要对其放大整流。由于微处理器A/D接口采样电压范围为0~5V,取放大倍数为100。该电路前一级运算放大器对前级电路呈高阻状态,对后级电路呈低阻状态,因此对前后级电路起到缓冲隔离作用。后级运算放大器起到电压放大作用后,驱动发光二级管,根据发光二极管的亮度指示传感器检测交流磁场的强弱。

图1 信号检测系统的电路
2 传感器布局方式
2.1 传感器布局方式设计
由于导线周围的磁场分布为[1]:

由此得:

对于无限长直流来说,上式中θ2=0,θ1=π,则有:

并且磁力线的方向垂直于导线平面以导线为轴的一系列同心圆。同一圆上的磁感应强度相同。
在水平面内取与导线垂直于探头的方向为X方向,与导线平行的方向为Y方向,竖直方向为Z方向,在同一高度情况对水平位置信号进行测试得出如下结论[2]。
如图2所示,导线周围磁场的强弱为一左右对称图像,因此可用X方向调整车体的位置,调整转向舵机角度的大小。
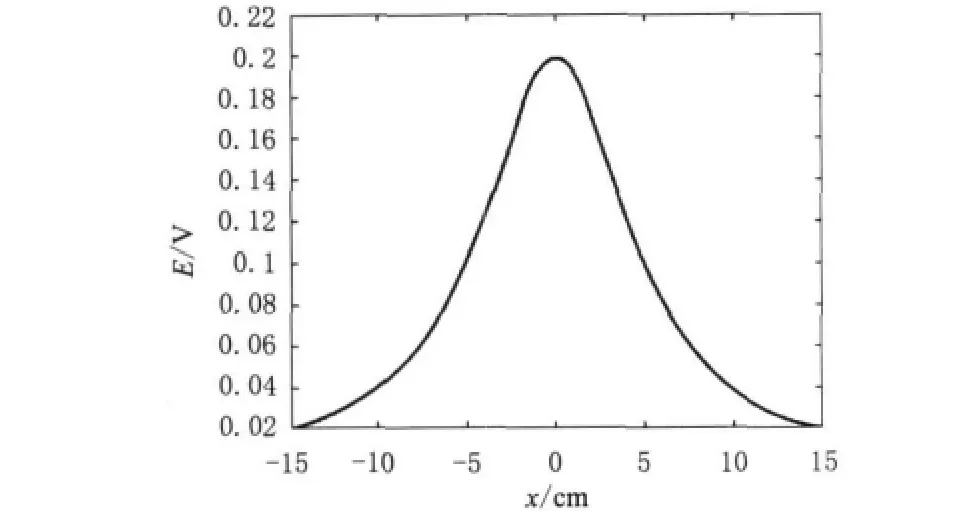
图2 线圈轴线(X轴)信号
传感器与赛道水平垂直放置,并且均匀分布于赛道前端。均布放置可以使得每个传感器检测过程中都能检测到数据,并且通过传感器的值不同,得到导线的初步位置,然后将数据传入微处理器,通过进一步分析得出道路中心精确位置,从而控制舵机转角的大小,使智能车在预定轨道行驶[3]。
2.2 数据分析
由表1和图3可知,当导线处于两传感器中央时,A/D采样信号差值(Ed值)为0;当将导线往左移时,Ed值小于0;当将导线往右移时,Ed值大于0。因此,导线位置在0~30cm之间变化时,A/D采样信号差值与探头中心距导线距离为单调函数。由此,利用A/D采样后信号差值大小确定赛道中线位置,起到导航作用。

表1 A/D采样后信号差值实测数据

图3 实测数据曲线
3 软件设计
3.1 软件主要功能与框架
智能车软件控制设计中,主要包括系统初始化、获取A/D值、数据检测、去除最大最小值、数据归一化处理、求均值、计算智能车车体位置和智能车方向控制等。
软件的主要功能有车体运行状态检测、电机PWM输出、车体速度控制、车体方向控制、车体运行流程控制、程序初始化、车模启动与停止控制、状态显示、上位机监控和参数设定等。
智能车控制系统软件流程如图4所示。

图4 智能车控制系统软件流程
3.2 软件分段插值标号算法
根据图3所示,A/D采样后信号差值的大小,与探头中心距导线的距离成单调分布规律,由此,可建立智能车方向控制策略[4]。利用左右对称的6个传感器,来判别道路中心位于6个传感器的哪个区间。将6个传感器由左至右进行编号{A,B,C,D,E,F},在微处理器中对6个传感器所检测到的信号值进行比较,得出最大值和次大值,从而判断出道路大体中心位置。此时得到的中心位置为6个传感器区间位置,为了控制的精确性,在6个区间之内采用插值标号的控制算法。由于两传感器检测信号差值成单调分布规律,所以在每个区间内根据图3所示进行分段插值,可根据实际需要将插入值分为3个,此时对应的舵机转角相应增加。为了控制的连续性,也可将插入值分为3~6个不等,实验证明,4个插入值即可满足转向需要。然后对插入值由左至右进行编号,每个编号对应不同的舵机转向角。
4 结束语
设计了电磁导航智能车检测系统,从硬件和软件的角度进行了详细论述,提出了一种简单高效的方向控制算法,实验证明,此方案具有良好的稳定性和精确性。采用此控制算法在第六届“全国大学生智能车大赛”中获得西部赛区决赛二等奖。但该方案还有改进之处,比如软件算法分段插值可以改为连续性控制方案,也可以增加道路情况预判策略。
[1]张昊飏,马 旭,卓 晴.基于电磁场检测的寻线智能车设计[J].电子产品世界,2009,16(11):152-155.
[2]李仕伯,马 旭,卓 晴.基于磁场检测的寻线小车传感器布局研究[J].电子产品世界,2009,16(12):41-44.
[3]马 蕾,王荣本.智能车辆导航控制技术[J].吉林大学学报,2004,34(4):582-586.
[4]胡广书.数字信号处理—— 理论、算法与实现[M].北京:清华大学出版社,1997.
