盖革模式APD阵列在激光雷达技术中应用
2013-03-20韩小纯王元庆
韩小纯,王元庆
(南京大学电子科学与工程学院,江苏南京210046)
1 引言
激光雷达技术是关系到国防安全的重要研究领域之一,不仅如此,其在自然灾害救援和地理测绘方面也有重要应用。目前,国际上已研制出多种体制的激光雷达,其中焦平面成像激光雷达备受关注。美国麻省理工学院林肯实验室自1996年开始研制基于GMAPD(Geiger-Mode Avalanche Photodiode)焦平面阵列的闪光激光雷达,并进行了飞行试验,证明其对地面伪装目标和树林中隐蔽目标具有良好的探测力[1]。
基于GMAPD阵列闪光激光雷达较其他体制激光雷达具有如下主要优点[2-3]:
(1)极高的探测灵敏度,可实现单光子探测;
(2)较高的测量精度,厘米量级;
(3)较高的探测效率,采用单脉冲焦平面阵列成像方式;
(4)较低的功耗;
(5)体积小,集成度高。
由于上述优点,国际上很多研究机构和公司已投入此研究。据报道,2011年林肯实验室在美国空军的支持下已完成ALIRT(Airborne Ladar Imaging Research Testbed)系统,并获得当年美国百大科技研发奖(R&D 100 Awards),ALIRT可在9 km高空作业,工作在3 km高度时距离分辨率可达一分米[4]。
我国由于探测器发展较慢,为了更好地借鉴国外最新的研究成果,提升我国的三维成像激光雷达技术水平,本文简述了GMAPD阵列激光雷达的工作原理及其各试验系统特性,重点介绍了麻省理工学院林肯实验室在此方面的研究进展。
2 GMAPD阵列器件简述
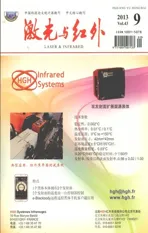
GMAPD阵列器件由盖革模式APD阵列和相应的计时集成电路阵列两部分构成,这两部分都是在各自独立的基片上按照统一的设计规范加工出来,然后利用桥接集成技术(Bridge Bonding)将两部分集成在一起[2]。如图1所示,这种桥接集成技术首先利用环氧树脂将CMOS计时电路和对应的APD阵列面对面胶合起来,在胶合的过程中两者之间没有任何电气连接。胶合之后形成了上面是APD阵列基底,中间为APD阵列,下面是CMOS计时电路阵列的“三明治”结构。然后,利用电化学刻蚀的方法将APD阵列的基底去除(APD阵列以背面照射的方式工作)。最后,在APD阵列的各单元之间刻蚀出通道,利用图案形成的方法在通道中形成“金属桥”以连接APD和计时读出电路。图2为利用桥接集成技术集成后的APD阵列显微照片。
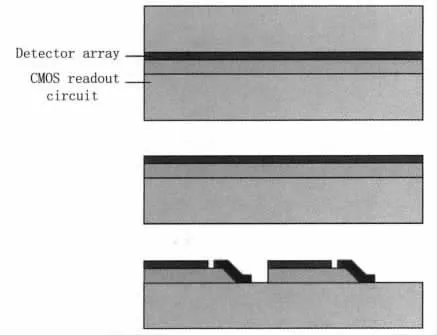
图1 桥接集成技术Fig.1 bridge bonding
现以32×32阵列GMAPD为例来具体说明其特性。阵列像元之间的间距为150μm,APD有效区域的直径为50μm,具有单光子探测能力。该阵列的设计目的是为了通过单激光脉来冲获取目标的三维信息,因此,每个像素单元都对应着一个独立的计时电路。光源发射的激光脉冲触发计时电路工作,当从目标反射回来的脉冲到达时,计时电路停止计时,并将计数结果保存供读出。这样焦平面上的每个像素单元都会得到由计时电路产生的距离信息,该计时电路的时间分辨率为0.5 ns,其对应的距离分辨率为7.5 cm。
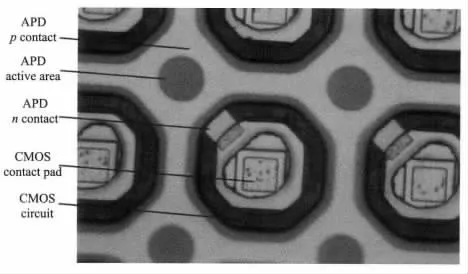
图2 APD/CMOS桥接后的显微照片Fig.2 photomicrograph of the same bridge-bonded APD/CMOS device
3 GMAPD焦平面成像激光雷达
2002年,林肯实验室相继研发了包括GEN-I(Brassbord)、GEN-II、GEN-III 三代实验系统[5],2003年和2011年分别研发了Jigsaw Ladar Sensor和ALIRT试验系统。在 GEN-I系统中,4×4的APD阵列被封装成一个独立的器件整合到印刷电路板上。每个APD单元对应着一个脉冲放大电路,放大后的脉冲信号通过同轴电缆传输到计时模块。而在GEN-II系统中,4×4的APD阵列集成了带有16个计时电路的CMOS芯片。GEN-III系统采用的则是完全将32×32APD阵列和32×32CMOS计时电路阵列相集成的传感器,相元数目更多,集成度更高。
2003年,Richard M.Marino领导的小组研发了Jigsaw Ladar Sensor系统,这个系统的突出特点是能够对遮蔽在树叶、伪装网后面的目标进行识别[3]。Richard M.Marino等人认为,单视角的激光三维成像,对于覆盖率为95%的目标只能得到很稀疏的抽样。如果能够获得目标从多个角度获取的点云数据,并将这些数据有效的综合就可以得到目标表面的密集抽样,利用这种方法实现对目标的可靠精确识别。表1列出了Jigsaw Ladar Sensor系统的主要参数。

表1 Jigsaw Ladar Sensor系统主要参数Tab.1 Jigsaw Ladar Sensor System Parameters
Jigsaw Ladar Sensor采用的是32×32 GMAPD阵列,在150 m作用高度横向分辨率为5 cm,距离分辨率为40 cm。其中,激光器采用了林肯实验室研发的微片激光(Microchip Lasers)技术,是一种被动调Q式的固态倍频Nd∶YAG激光器,工作波长为 532 nm,脉冲宽度 300 ps,脉冲频率 16 kHz[6-7]。图3给出了Jigsaw Ladar Sensor三维成像的一个实例,图3(a)是从多角度获取的目标原始点云数据融合后建立的三维场景图,从俯视的角度观看只能看到树冠而看不到隐藏在下面的军事目标。图3(b)和图3(c)是对三维场景的处理过程,将树冠层削去则隐藏在树下的坦克目标清晰可见[8],如图3(d),从而实现对伪装目标的精确识别。
2011年,林肯实验在美国空军的支持下完成了ALIRT(Airborne Ladar Imaging Research Testbed)系统的研制[9]。ALIRT能够从9 km高度对广域地形进行快速高分辨率三维成像,每小时可完成2000 km2区域的三维成像,其在3 km高度距离分辨率为10 cm。图4给出了ALIRT系统原理框图,ALIRT采用了32×128 GMAPD焦平面计时阵列[10],配合角度编码器实现大幅宽的快速三维成像。林肯实验室还为ALIRT系统设计了GMAPD数据读出子系统,其读出速率为160MB/s。为了将生成的3D距离图像精确地放置在世界坐标系中,ALIRT安装了全球定位系统(GPS)和惯性测量装置(IMU)用来确定飞机的位置和飞行方向。
图3 树冠下目标的提取识别Fig.3 recognition of the target below the tree canopy

图4 ALIRT系统原理框图Fig.4 a system block diagram of ALIRT
图5 是ALIRT产生的美国科罗拉多大峡谷三维地形图,左上角为大峡谷的实景照片。大峡谷的高度落差接近2 km,从图中不仅可以看出大峡谷的地形结构,还可以看到清晰的细节,可见ALIRT系统的作用距离和精度都达到了很高的水平。

图5 美国科罗拉多大峡谷的ALIRT成像Fig.5 ALIRT imagery of the Grand Canyon
4 结语
文中介绍了美国林肯实验室研发的盖革模式APD阵列,并给出其在激光雷达应用方面的最新研究进展。基于GMAPD阵列的激光雷达具有灵敏度高、距离分辨率高、作用距离远、快速高效和能对伪装目标精确识别等优点。林肯实验室已经研制了GEN-I、GEN-II、GEN-III、Jigsaw Ladar Sensor 和ALIRT等试验系统,这些激光雷达系统所表现出来的出色性能在军事和民用方面都受到广泛关注。随着探测器技术的不断发展,GMAPD阵列性能将会进一步提升,也将在夜视系统、深空探测和侦察应用等领域中有更加广泛的应用。
[1] Wu Lijuan,Li Li,Ren Ximing.3D imaging simulation of APD arrays laser radar system based on Geigermode[J].Infrared and Laser Engineering,2011,40(11):2180 -2186.(in Chinese)吴丽娟,李丽,任熙明.盖革模式APD阵列激光雷达的三维成像仿真[J].红外与激光工程,2011,40(11):2180-2186.
[2] Brian F Aull,Andrew H Loomis,et al.Geiger-mode avalanche photodiodes for three-dimensional imaging[J].Lincoln Laboratory Journal,2002,13(2):335 -350.
[3] Richard M Marino,William R Davis,Jr.Jigsaw:A Foliage-Penetrating 3D Imaging Laser Radar System[J].Lincoln Laboratory Journal,2005,15(1):23 -36.
[4] MIT Lincoln Laboratory.MIT lincoln laboratory wins four 2011 R&D 100 awards[EB/OL].http://www.ll.mit.edu/news/2011R-DAwards.html,2011 -08.
[5] Marius A.Albota,Brian F.Aull,et al.Three-dimensional imaging laser radarswith geiger-mode avalanche photodiode arrays[J].Lincoln Laboratory Journal,2002,13(2):351-370.
[6] J J Zayhowski.Microchip lasers[J].Lincoln Laboratory Journal,1990,3(3):427 - 446.
[7] John JZayhowski.Passively Q-switched Nd:YAG microchip lasers and applications[J].Journal of Alloys and Compounds,2000,302 -304:393 -400.
[8] Michael EO'Brien,DanielG Fouche.Simulation of3D laser radar systems[J].Lincoln Laboratory Journal,2005,15(1):37-60.
[9] Robert Knowlton.Airborne ladar imaging research testbed[M].America:Lincoln Laboratory,2011.
[10] R&D Magazine.Faster mapping at higher altitudes[EB/OL].http://www.rdmag.com/award-winners/2011/08/faster-mapping-higher-altitudes,2011 -08 -14.