冷再生机电液伺服系统的反馈调节优化控制
2013-03-20杨海李威杨东霖
杨海,李威,杨东霖
(1.中国矿业大学机电工程学院,江苏徐州221116;2.成都地铁运营有限公司,四川成都610051)
沥青路面的就地冷再生技术,能使路面的废旧材料得到重新利用,是一项符合可持续发展规律的环保技术。沥青路面冷再生施工过程中,冷再生机喷洒装置喷洒出的泡沫沥青的性能直接影响到路面冷再生的成型质量,所以该装置控制系统的好坏直接关系到整个装置的运行效果。因此,建立了一套基于阀控液压马达系统的路面冷再生机泡沫沥青喷洒控制系统模型。对系统的特性进行分析,通过对系统模型进行优化和PID校正后得到了很好的控制效果。
1 冷再生机泡沫沥青喷洒装置
冷再生机的喷洒系统是保证工艺完成的关键工作装置,其工作过程为:随着冷再生机的行走,整机铣刨装置将旧路面铣刨并破碎,喷洒系统精确地控制各种再生剂的添加量,并通过喷洒杆上的喷嘴将再生剂均匀地喷入拌和罩内,经拌和转子与集料搅拌后,即可形成新的路用再生材料[1]。
所谓泡沫沥青,是通过将少量的水和空气注入到热沥青中(水和沥青均需精确计量),水遇到高温沥青被迅速汽化,从而使沥青产生微细的泡沫,体积迅速膨胀至原来的15~20倍而形成。泡沫沥青作为再生剂,可形成柔性基层。增加粒料的剪切强度和水稳定性,另外在不同的气候和施工环境下,泡沫沥青均具有良好的作业适应性和性能可靠性,其应用已越来越广泛。
在泡沫沥青喷洒系统中,控制器通过比例放大器控制电液比例阀,比例阀在阀控液压马达系统中对液压马达进行调速,从而分别控制连接液压马达的热沥青泵和发泡水泵的转速来精确控制水和沥青的流量,并通过泵转速传感器对流量进行反馈。由于发泡水和热沥青的流量控制系统的控制原理基本相同,均是阀控马达电液伺服速度控制系统,在此只对热沥青的流量控制系统做具体分析。沥青流量控制的液压控制系统框图如图1所示。
2 系统数学模型的建立
冷再生机泡沫沥青喷洒系统是一个比较复杂的系统,除控制主机外,冷再生机喷洒系统主要由比例驱动器、电液比例阀、液压马达、液压泵、速度传感器、液压管路以及负载构成。以下首先分析系统各环节的动态数学模型。
2.1 执行机构传递函数
执行机构采用的是意大利ATOS 公司的10 通径的DPZO-AE-171型三位四通带集成式模拟电子比例驱动器的先导式高性能电液比例方向阀。通常将电液比例阀简化为二阶振荡环节[2],则可知执行机构的传递函数为:

式中:Q(s)为电液比例阀在稳态工作点附近流量(m3/s);U(s)为偏差电压(V);Ka为比例驱动器增益,Ka=0.33 A/V;ωv为电液比例阀的等效无阻尼自振频率,ωv=320 rad/s;ζv为电液比例阀的等效无阻尼系数,ζ=0.7,量纲为1;s为拉普拉斯算子(下同)。
其中:Kq为电液比例阀在稳态工作点附近流量增益:

式中:qv为阀的流量,50 L/min;p为系统压力,p=30 MPa;Δp为阀前后压差,Δp=1 MPa;I为额定电流,I=3.3 A。
2.2 控制对象传递函数
由电液比例阀的线性化流量方程、液压马达的流量连续性方程以及马达轴上的力矩平衡方程[3]进行拉普拉斯变换并联立3个方程可得阀芯位移作用于马达的输出角位移传递函数方程。
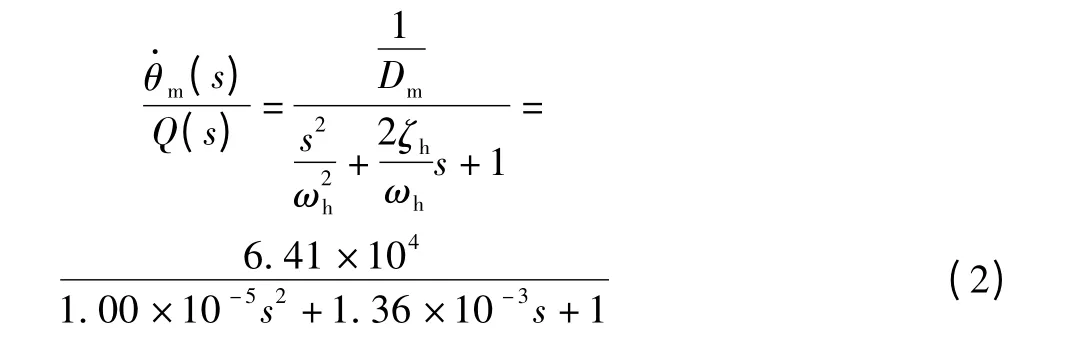
考虑到在实际应用中,液压马达后面连接的沥青泵作用在均匀介质沥青上,不会产生比较大的负载波动,在这里主要考虑液压马达角速度对控制器作用在比例放大器的控制电信号的影响。化简后可得马达输出角位移对流量的传递函数拉普拉斯变换为:
2.3 速度传感器的传递函数
速度传感器选用光洋KOYO型号为TRD-J1000-RZW 增量式旋转编码器。可将速度传感器视为比例环节,则有

式中:Kf为速度传感器的增益,Kf=0.21 V·s/rad;U(s)为偏差电压(V)。
2.4 阀控马达系统传递函数
综合图1和式(1)、(2)、(3)可得阀控液压马达电液速度控制系统相对于控制信号电压输入的传递函数方框图,如图2所示。图中前向通道中的环节依次表示图1中的比例驱动器、电液比例阀以及比例阀-马达液压系统(控制对象)的传递函数,负反馈环节表示的是泵转速传感器的传递函数。

图2 电液比例阀控马达速度控制系统传递函数方框图
3 系统特性分析
由系统结构可以看出,阀控液压马达速度控制系统是一闭环负反馈控制系统,系统通过转速传感器对泵转速的反馈并和系统设定电压比较得出的偏差电压来控制系统的前向电路,最终实现对转速的闭环控制。由图2可以看出,系统是一个四阶惯性系统,由于系统零极点分布的不同,系统的稳定性也大不相同,很容易产生震荡发散等不稳定现象。
由传递函数可知阀控马达速度控制系统输出泵转ξh为液速与输入电压的开环传递函数为:

系统开环增益[4]:

画出系统的开环传递函数的根轨迹图如图3所示。
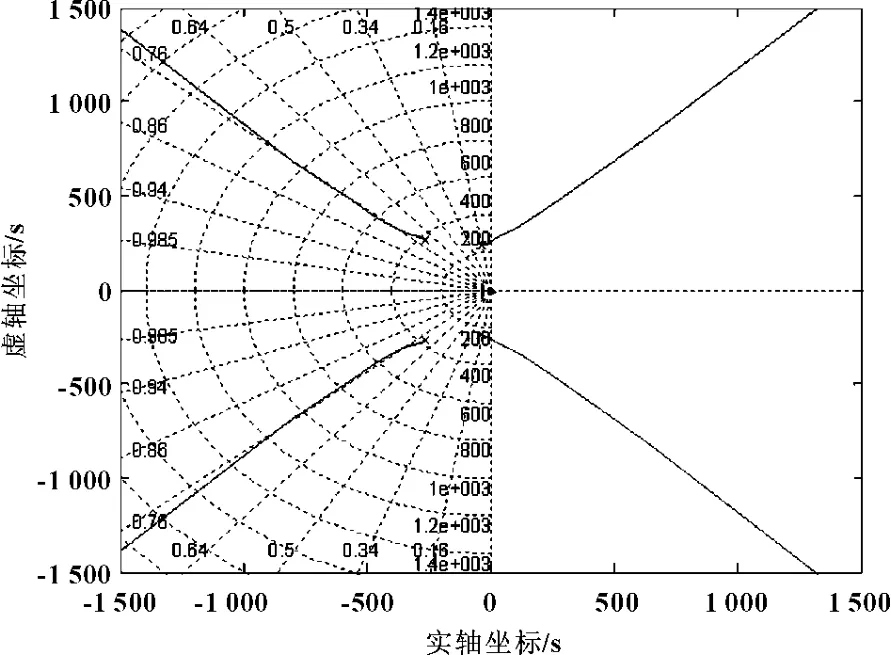
图3 控制系统开环传递函数的根轨迹图
由系统的根轨迹图可以看出系统零极点分布由两对共轭的复极点组成,其中一对共轭的复极点远离虚轴是另一对极点到虚轴距离的5倍以上,故可以认为距离虚轴近的那一对极点为系统的主导极点,在分析系统时可以直接忽略另外一对极点。由上面分析可以对系统作如下简化。
化简后的开环传递函数为:

画出简化后的开环系统Bode 图和闭环阶跃响应曲线如图4、5所示。
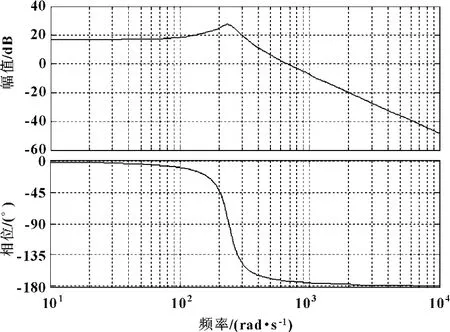
图4 化简后开环系统的伯德图
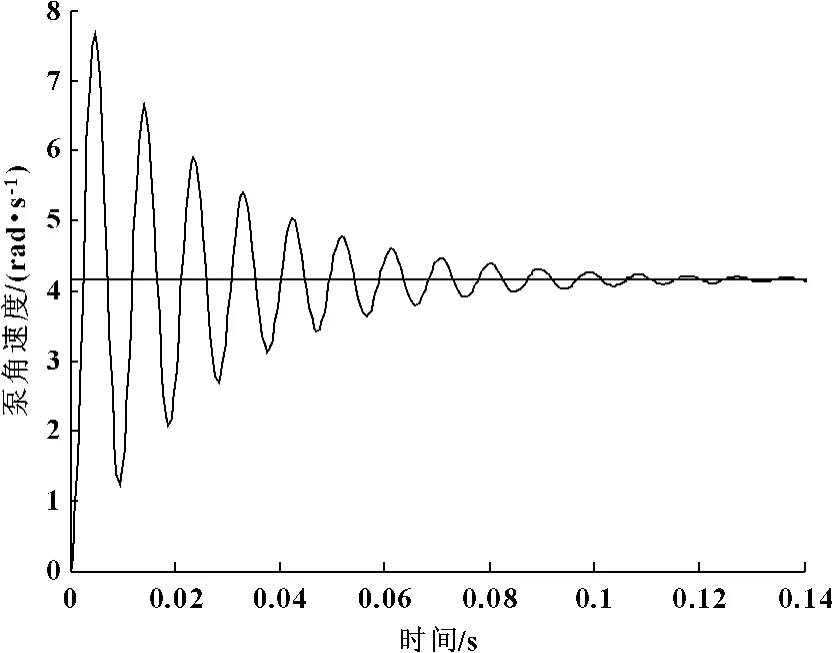
图5 闭环系统的阶跃响应曲线图
从系统频率特性曲线可以看出,当幅频特性在穿越0幅值线时,其穿越频率为-40 dB,系统的稳定裕量很小,在工程应用中很难达到稳定状态;通过闭环传递函数的阶跃响应曲线可以清楚地看到系统出现了很严重的超调和震荡。假如用这样的系统去做沥青泵流量的控制系统,将会使控制精度大大降低,严重将会损坏液压元件。
4 控制系统的PID校正
通过上述对阀控液压马达系统特性分析,可以知道系统本身很难达到预期的动态品质,要使系统具有良好的稳定性、低超调及快速响应性能,通常采用调节器来满足要求[5]。
对于化简后的系统为一个二阶系统,对于二阶系统,必须采用完整的PID校正才能实现任意极点配置。设固有传递函数和校正环节传递函数分别为

则系统的闭环传递函数为

假设得到的闭环传递函数三阶特征多项式可分解为

令对应项系数相等,有KD+a1=2ζωn+β,KP+
考虑到化简后的二阶传递函数具有很好的快速性,为了不改变系统的固有的好的特性,故构造出的理想二阶模型的零极点分布也应该和原模型有相同的数量级。二阶开环最佳模型的阻尼比为该系统稳定储备大,能满足实际要求。

该系统为一个二阶震荡环节,为了达到PID校正后的传递函数形式,在系统中串联一个一阶惯性环节后得到理想模型开环传递函数为

利用上述计算方法,由式(8)可得用PID校正环节优化了零极点后的PID参数值为:
KP=0.755,KI=144.6,KD=2.25×10-3
将PID校正环节放在系统的主回路上,可以得到校正后的控制系统框图和阶跃响应曲线图,如图6和图7所示。图6中,阶跃响应作为信号激励源,在经过前向通道增益后串联一个PID 调节器,调节后经过系统传递函数添加一个负反馈到输入端并进行信号输出,得到图7所示的响应曲线图。

图6 经过PID校正后的系统框图

图7 经过PID校正后的泵角速度阶跃响应曲线图
通过利用Simulink仿真后可以看出系统的阶跃响应曲线有一个比较大的响应斜率,也就是说系统有很好快速性,此外,系统基本没有震荡仅有少量的超调现象产生,基本可以看出接近于阶跃响应的输入信号的波形标准。因此可以认为校正后的系统具有良好的响应特性和稳定性。
5 控制器的计算机实现
以上的计算都是建立在模拟量的系统中,如果要在计算机中实现控制器,则需要把模拟量的控制器转变为可以被计算机识别的数字量控制器。需要经过z变换并画出控制器的z 变换实现的框图[6]。
首先对模拟量的控制器进行化简得出控制器的传递函数Gj(s)。

然后,利用Matlab 对控制器的传递函数进行z 变换,转换成在离散系统下的控制器传递函数。

对式(11)经过化简后可以忽略后面一项得到:

对该系统的数字控制器利用直接程序法进行离散化分析可以得到离散的控制器传递函数为:
u(k)=145.355e(k)+u(k-1)
这样就很容易实现对控制器的编程,并且在离散控制主机中实现。
6 小结
通过对冷再生机的阀控马达调速系统的建模仿真可以看出,现实中的阀控马达的系统特性是不稳定的,不能直接作为控制对象和执行机构来使用,否则会减少系统的控制精度,严重时还会减少元器件使用寿命破坏整个系统、损坏机器,造成不可估量的损失。
通过利用对高阶系统的零极点位置分析,可以将对系统影响小的极点进行优化处理,进而化简整个控制系统。将得到的二阶系统采用完整的PID校正,实现了对阀控马达系统的模型任意极点配置,使系统能够有很好的稳定储备而又不影响系统本身的快速性。并且对控制器进行z 变换离散化处理,以方便在计算机中编程实现。
在真实的系统中建立系统模型并且加入校正环节,可以使系统具有更好的稳定性,提高控制精度,这对解决现实工程应用的问题,具有非常重要的意义。
【1】刘大伟.路面冷再生机喷洒自动控制系统研究[D].徐州.中国矿业大学,2008.
【2】熊美华.电液比例阀控马达速度控制系统分析与仿真研究[D].西安:长安大学,2004.
【3】董景新,赵长德,熊沈蜀,等.控制工程基础[M].2版.北京:清华大学出版社,2003.
【4】黄银萍,唐志勇.工程机械电液比例阀控制系统模糊PID控制器研究[J].机床与液压,2010,38(13):52-54.
【5】陈小军,吴向东.基于液压比例位置控制的数字PID设计与实现[J].机械工程与自动化,2009(6):126-128.
【6】姜学军,刘新国,李晓静.计算机控制技术[M].2版.北京:清华大学出版社,2009.