基于LEO增强的COMPASS系统设计及性能分析❋
2013-03-17赵金峰于笑冯少栋邓琳
赵金峰,于笑,冯少栋,邓琳
(1.解放军69105部队,沈阳110005;2.解放军96610部队,北京102208;3.解放军理工大学通信工程学院,南京210007)
基于LEO增强的COMPASS系统设计及性能分析❋
赵金峰1,❋❋,于笑1,2,冯少栋2,邓琳3
(1.解放军69105部队,沈阳110005;2.解放军96610部队,北京102208;3.解放军理工大学通信工程学院,南京210007)
针对COMPASS系统的PNT(Position,Navigation,and Timing)性能在全球不均匀的现状,提出采用48星极轨或玫瑰星座的LEO(Low Earth Orbit)通信卫星对COMPASS系统进行性能增强的方案,并对其覆盖性能及各纬度带的平均覆盖仰角进行分析。在此基础上,研究并探讨了LEO星座通信卫星增强的导航系统组成和原理,并以位置精度因子和可见卫星数为指标,对比分析两类LEO星座增强下的导航系统性能。
COMPASS;低轨星座卫星通信系统;增强;位置精度因子;可见卫星数
1 引言
COMPASS系统是我国自主研发的卫星导航定位系统,是由地球同步轨道卫星(Geosynchronous Earth Orbit,GEO)、倾斜同步轨道卫星、中轨道卫星构成的混合结构。这样的一种空间段配置方式,决定了未来我国的卫星导航定位系统的覆盖性能不会是全球均匀的,在中国及其附近区域具有较高的多星可视概率,而在其他区域只能依靠中轨道卫星提供的覆盖,也就是说未来我国全球卫星导航定位系统所提供的PNT(Position,Navigation,and Timing)性能很可能在全球并不是均等的,在国外的性能可能会稍差一些。
随着COMPASS系统在民用、军事等应用领域的不断拓展和深入,人们对COMPASS系统首次定位时间、定位精度、完好性、连续性、可用性以及抗干扰能力的要求会越来越高,不仅要尽量缩短定位时间、提高定位精度、改善恶劣环境下的服务质量,还要求尽量利用其他各种手段提高COMPASS系统的生存能力,这促使我们有必要研究一些有效的增强手段。从美国Iridium系统辅助GPS系统的研究成果来看,利用LEO星座通信卫星对导航系统进行增强将是一种有效的方法。
2 COMPASS系统简介
根据“先区域,后全球”的建设思路,COMPASS卫星导航定位系统建设分为COMPASS I和COMPASS II两个阶段。COMPASS I计划在2012年前完成12颗BD2星的组网,实现区域覆盖,包括5颗在35 786 km高度运行的GEO、4颗在21 500 km高度运行的中轨道卫星和3颗分别处于3个轨道上飞行于35 786 km高度的倾斜同步轨道卫星[1]。COMPASS II则是在此基础上完成由5颗GEO和30颗非地球同步轨道卫星组成的卫星导航定位系统,从而实现全球覆盖[2-3]。
3 低轨星座卫星通信系统简介
3.1 48星极轨星座
极轨星座的卫星处于相同高度的圆形极轨道上,能够覆盖全球,在无人居住的两极地区具有很高的多星覆盖率,易于建立星间链路,Iridium系统采用此星座结构[4]。经过对比分析,采用48星的极轨星座方案可实现全球覆盖,具体参数如表1所示。

表1 48星极轨星座方案的主要技术参数Table 1 Polar constellation parameters
3.2 48星玫瑰星座
玫瑰星座的卫星处于相同轨道高度和倾角的倾斜圆轨道上。不同轨道面中卫星的覆盖区是重叠的,这样在人口稠密的中纬度地区具有较好的多星覆盖率,但不能覆盖两极地区,Globalstar系统采用此星座结构[4]。采用48星的玫瑰星座方案可实现南北纬80°覆盖,具体参数如表2所示。

表2 48星玫瑰星座方案的主要技术参数Table 2 Rose constellation parameters
4 系统设计
增强系统由以下几部分组成:导航卫星、LEO星座通信卫星、参考站网络、控制中心、信关站和用户终端,组成原理如图1所示。

图1 LEO卫星增强的COMPASS系统组成原理图Fig.1 The structure of LEO satellites enhanced COMPASSsystem
假设图1中导航卫星为COMPASS II卫星。LEO卫星为前面所述的48星极轨或玫瑰星座。参考站网络,通常由多个差分参考站组成,主要对可见的导航卫星和LEO卫星进行观测和测量,测量值包括基于码或载波相位、多普勒频移、导航卫星与星座卫星之间的钟差、从导航卫星解调获得的星历信息以及气象信息等。这些参考站应保持时间同步,参考站接收机可采用普通温补晶振。控制中心主要的功能是接收从参考站传输的信息,并综合利用这些信息通过数学模型计算出差分信息,并将差分信息传输到信关站。差分消息包括参考站测得的原始伪距、载波相位、多普勒频移、可见导航卫星的星历参数、导航卫星与LEO星座通信卫星的钟差、完好性数据(导航星的状态、差分数据的精度指示)以及其他辅助数据(参考站的位置、气象数据等)。信关站是指星座通信系统中的信关站,可为地面其他的应用提供差分消息。
5 性能评价指标
5.1 精度因子
在卫星导航定位系统中,定位与授时解算的精度最终可用精度因子和伪距误差之积来表示[5]。精度因子描述了不同的卫星几何分布对定位精度的不同影响,用户与卫星的几何分布越好,DOP(Dilution of Precision)值就越小,而在同等用户等效距离误差下,往往代表星座分布结构越好,定位精度越高[6]。
精度因子包括几何精度因子、位置精度因子、水平精度因子、垂直精度因子和时间精度因子5个参数,不同的应用对这些参数有不同的要求。
GPS接收机的定位结果(xu,yu,zu)由导航电文中解算的卫星位置(xj,yj,zj)和观测伪距ρj(j=1,
2,…,n,n是可见卫星数)决定,单点定位解算方程如式(1)所示:

其中:

n≥4时可采用最小二乘法求解式(3):

假设伪距误差矢量dP,则对位置和时间估计的误差是

通常假设dP各分量分布相同且相互独立,均方差等于卫星的用户等效测距误差,即

其中,cov(·)为协方差。所以

对称矩阵G=(HTH)-1的各分量定量地表示了伪距误差如何变换为dX的协方差的各分量,精度因子可由G的分量来定义

各种精度因子可表示为
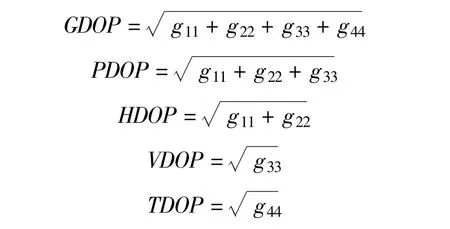
以上DOP的概念都是基于不加权的协方差矩阵得到,因此DOP并不能十分精确地反映系统的导航精度。尽管如此,在分析该系统的导航性能时,为了撇开其他一些非星座因素的影响,人们还是经常采用DOP值衡量星座的导航性能[7]。
5.2 可用性
导航系统的可用性是指系统服务可以使用的时间百分比,是在特定覆盖区提供可用服务能力的标志,与环境的物理特征和发送导航信号发射机的技术性能有关[8],可以理解为导航系统同时满足精度、完好性和连续性要求的概率。通常,可以将可用性等效为满足某一门限要求的定位精度。
一个地区同一时间内覆盖到的卫星数越多,可供选用的卫星越多,可带来以下好处:第一,通常可以得到更小的DOP值,提高定位精度;第二,服务可用性更高;第三,接收机自主完好性监测及故障检测与排除可用性更高,有利于保证系统的完好性。
6 性能分析
6.1 精度因子指标
DOP参数中的位置精度因子(Position Dilution of Precision,PDOP)可直接用于标定星座覆盖区域、分析星座服务可用性和导航定位精度等,具有较好的代表性。本小节选取PDOP值为指标,使用STK(Sim Tool Kit)软件仿真COMPASS II及其增强前后的性能,LEO卫星星座采用第3节中的极轨和玫瑰星座,分析在这两种方案下COMPASS II在增强前后全球范围内的PDOP值变化情况。
在空间域的统计中,选择仿真区域为全球,采样网格纬度/经度为1°;在时间域的统计中,仿真时间为2007年7月1日12∶00到2007年7月2日12∶00,取样间隔为1min。
(1)方案一:极轨星座
图2为最低观测仰角为10°时,COMPASS II经极轨星座增强前后全球范围内的PDOP值变化情况。

图2 最低观测仰角为10°时,增强前后全球范围内PDOP值变化情况Fig.2 The variety of PDOP by Polar enhanced at10°elevation
由图2可得出,COMPASS II在增强前后的PDOP值在全球范围内有较明显的改善,尤其是在高纬度地区改善较大。
(2)方案二:玫瑰星座
图3为最低观测仰角为10°时,COMPASS II经玫瑰星座增强前后全球范围内的PDOP值变化情况。

图3 最低观测仰角为10°时,增强前后全球范围内PDOP值变化情况Fig.3 The variety of PDOP by Rose enhanced at10°elevation
由图3可得出,COMPASS II在增强前后的PDOP值在全球范围内都有一定的改善,但在高纬度地区无明显改善。
表3中给出了两种方案的对比情况。

表3 增强后PDOP在全球范围内的改善情况Table 3 PDOP improvementwith LEO enhancement
在其他影响定位条件等同情况下,根据表4的统计结果,可以认为在全球范围内经极轨星座增强之后的系统可以达到一个更优的定位精度。
6.2 可用性指标
本小节选取仿真区域内的可见卫星数为指标,利用STK软件仿真COMPASS II及其增强前后的可见卫星数,然后利用Matlab处理仿真数据得出具体的比较结果。仿真条件与6.1节相同。
图4给出了可见仰角为10°时,增强前后系统的平均可见卫星随纬度的变化情况。

图4 最低仰角10°时,平均可见卫星数随纬度变化情况Fig.4 The number of visible satellites at10°elevation
从图中可以看出,增强前可见卫星数在9~16颗之间,中低纬度地区有较多的可见卫星数,高纬度地区可见卫星数随纬度升高而降低。经玫瑰星座增强之后,中低纬度平均可见星数都保持在17颗以上,但高纬度地区可见卫星数改善不大。经极轨卫星增强后各纬度带可见卫星数较平均,都在16颗以上,大大提高了系统性能。
对于处在城市、峡谷、山区及丛林等地区的用户终端,由于易受周围地形地物的阻挡或遮蔽的影响,通常只能看到高仰角的卫星,而大多数低仰角的卫星一般不可见,从而造成用户终端不能实现定位。图5为可见仰角为40°时,增强前后系统的平均可见卫星随纬度的变化情况。在增强之前,纬度65°以上的地区,导航卫星的个数小于4颗,通常不能正常定位。经极轨星座增强之后,即使在高纬度地区,可见卫星数也总多于4颗。

图5 最低仰角40°时,平均可见卫星数随纬度变化情况Fig.5 The number of visible satellites at40°elevation
7 结束语
本文针对COMPASS系统建设发展中存在的不足,提出了用于增强COMPASS系统的48星极轨和玫瑰星座方案,对其覆盖性能及各纬度带的平均覆盖仰角进行了分析,研究并探讨了LEO增强的COMPASS系统组成和原理。最后,以位置精度因子和可见卫星数为指标,对两类星座增强下的COMPASS部分性能进行了仿真分析。结果表明,48星极轨星座与COMPASS系统在星座构型上互补优势更为明显,在全球范围内经极轨星座增强之后系统的位置精度因子更小,在高纬度地区可见卫星数得到了明显提高,这与国外的相关研究得出的结论相似。
[1]刘基余.GNSS全球导航卫星系统的新发展[J].遥测遥控,2007,28(4):1-6. LIU Ji-yu.Recent Development of the Global Navigation Satellite System[J].Journal of Telemetry,Tracking and Command,2007,28(4):1-6.(in Chinese)
[2]谭述森.北斗卫星导航系统的发展与思考[J].宇航学报,2008,29(2):391-396. TAN Shu-sen.Development and Thought of Compass Navigation Satellite System[J].Journal of Astronautics,2008,29(2):391-396.(in Chinese)
[3]LU Mingquan.Simulation and Measurements on BeiDou-2 Positioning Performance[C]//Proceedings of PNT Symposium.Stanford,CA,USA:IEEE,2011.
[4]张更新.现代小卫星及其应用[M].北京:人民邮电出版社,2009. ZHANG Gen-xin.Modern small satellites and their applications[M].Beijing:People′s Post&Telecommunication Press,2009.(in Chinese)
[5]谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009. XIEGang.GPSPrinciple and receiver design[M].Beijing:Publishing House of Electronics Industry,2009.(in Chinese)
[6]孟健,孙付平,毛悦.伪卫星改善DOP值的数学分析[J].测绘科学,2008,33(3):52-54. MENG Jian,SUN Fu-ping,MAO Yue.The analysis of reducing DOP with pseudolites in theory[J].Surveying and Mapping,2008,33(3):52-54.(in Chinese)
[7]孟健,孙付平,丛佃伟.伪卫星增强区域卫星导航系统组网仿真[J].测绘科学技术学报,2008,25(3):213-215. MENG Jian,SUN Fu-ping,CONG Dian-wei.Plans of Augmenting Regional Satellite Navigation Using PLs[J].Journal ofGeomatics Science and Technology,2008,25(3):213-215.(in Chinese)
[8]GPS原理与应用[M].寇艳红,译.北京:电子工业出版社,2007. GPS Principles and Applications[M].Translated by KOU Yan-hong.Beijing:Publishing House of Electronics Industry,2007.(in Chinese)

赵金峰(1986—),男,黑龙江亚布力人,2012年于解放军理工大学获硕士学位,主要研究方向卫星通信、卫星导航;
ZHAO Jin-feng was born in Yabuli,Heilongjiang Province,in 1986.He received the M. S.degree from PLA University of Science and Technology in 2012.His research interests include satellite communication and satellite navigation.
于笑(1978—),男,辽宁沈阳人,博士研究生,主要研究方向为通信与信息系统;
YU Xiao was born in Shenyang,Liaoning Province,in 1978. He is currently working toward the Ph.D.degree.His research concerns communication and information system.
冯少栋(1981—),男,河南安阳人,2011年于解放军理工大学获博士学位,现为高级工程师,主要研究方向为卫星通信、卫星导航;
FENG Shao-dongwasborn in Anyang,Henan Province,in 1981. He received the Ph.D.degree from PLA University of Science and Technology in 2011.He is now a senior engineer.His research interests include satellite communication and satellite navigation.
Email:13feng@sina.com
邓琳(1987—),男,湖南衡阳人,2009年于南京邮电大学获学士学位,现为解放军理工大学硕士研究生,主要研究方向为卫星导航、卫星通信。
DENGLin was born in Hengyang,Hunan Province,in 1987.He received the B.S.degree from Nanjing University of Postand Telecommunications in 2009.He isnow a graduate student.His research interests include satellite navigation and satellite communication.
Design and Performance Analysis of LEO Satellites Enhanced COMPASS System
According to the status that COMPASS system′s PNT(Position,Navigation,and Timing)is asymmetry in theworldwide,the polar constellation and rose constellation are proposed to enhance the COMPASS,and then their coverage performances are simulated and analysed.Furthermore,the structure and principle of enhanced COMPASSsystem are discussed.By using the index of position dilution of precision and the number of visible satellites,the performance of enhanced system is comparatively analysed.
COMPASS;LEO constellation satellite communication system;augmentation;PDOP;number of visual satellites
TN96
A
1001-893X(2013)02-0131-05
10.3969/j.issn.1001-893x.2013.02.004
2012-05-09;
2012-09-18 Received date:2012-05-09;Revised date:2012-09-18
❋❋通讯作者:13feng@sina.com Corresponding author:13feng@sina.com
ZHAO Jin-feng1,YU Xiao1,2,FENG Shao-dong2,DENG Lin3
(1.Unit96105 of PLA,Shenyang 110005,China;2.Unit96610 of PLA,Beijing 102208,China;3.Institute of Communication Engineering,PLA University of Science and Technology,Nanjing 210007,China)