基于旋翼结构微多普勒特征的目标识别方法
2013-03-12谭源泉王厚军李良超
谭源泉 王厚军 李良超 廖 欢
(1.电子科技大学电子工程学院,四川 成都611731;2.四川九洲电器集团有限责任公司,四川 绵阳621000)
引 言
目标微动特征反映了雷达目标的电磁散射特性、几何结构及运动特征,为雷达目标特征提取提供了新的途径.直升机具有大的旋翼,会形成区别于固定翼飞机的微多普勒特征;螺旋桨飞机的旋转叶片较小,具有区别于直升机的调制特征.因此,利用微多普勒特征对空中目标探测和识别具有非常重要的价值[1],也是近几年研究的热点问题.
国内外研究者对利用微多普勒特征识别空间真假目标[2-3]、刚体和非刚体目标的微动特性与微动特征提取方法[4-8]、微多普勒分析技术在直升机类目标微运动特征提取和目标识别中的应用[9]、飞机旋翼产生的旋转部件回波(JEM)特征研究[10-12]、基于特征谱散布特征的低分辨雷达目标分类方法[13]、微动目标雷达特征提取[14]、直升机旋翼的叶片结构对调制回波的影响[15]等方面开展了研究工作.
这些文献仅仅利用飞机目标旋翼的微多普勒调制特征实现飞机目标的粗分类,没有分析其他关于目标旋翼结构及运动特征的更精细特征的提取方法.本文基于飞机目标旋翼结构及微调制特性,提出了一种新的旋翼目标自动辨识方法,在分析了旋翼飞机目标的回波信号组成的基础上,对飞机旋翼回波信号进行建模,从利于目标分类的角度,分析了基于回波频谱、JEM调制、旋翼结构及运动参数三类特征的提取方法,通过仿真验证了所提出的目标辨识方法的有效性.
1 飞机回波信号模型
直升机目标的雷达回波主要由机身回波、主旋翼回波、尾翼回波和轮毂回波四部分组成[14],还包括噪声分量.主要考虑飞机机身回波和主旋回波.由于易受机身遮挡,尾翼经雷达波束照射反射的回波不稳定,轮毂回波幅度较小,对谱宽有一定的影响.
在不考虑有源和地杂波及其他干扰的情况下,从低分辨率雷达正交接收机得到的信号包络至少包含机身分量、旋转部件回波(JEM)分量和噪声分量,其等效模型[13]为

式中:as(t)是防空雷达系统对回波的综合影响,包括发射信号、接收机方式和天线扫描方式的影响;Sf(t)、Sjem(t)、wn(t)分别是机身分量、旋转部件分量和噪声分量;Cf、Cjem、Cn分别是归一化机身分量、JEM调制分量和噪声分量的强度系数.
1.1 主旋回波信号
以雷达为坐标原点建立雷达与螺旋桨相对运动坐标系,如图1所示.假设桨叶形状及桨叶间夹角相同,螺旋桨以速度ν1水平匀速飞行;桨叶旋转中心方位角为α,俯仰角为β;螺旋桨旋转中心相对于雷达高度为h.其他参数如下:N为单个螺旋桨的叶片数;fr为桨叶转速;L为有效桨长;f0为雷达载频;λ为雷达波长;R0为初始时刻雷达至旋转中心的距离;θ0是基准叶片的初始相角,t时刻的旋转角变为θt=θ0+2πfrt.
令雷达远场扫描,通常电磁波波长远小于螺旋桨长度,因此,可认为雷达的后向散射工作于光学区,可将每个螺旋桨叶片作为线性目标处理.
若飞机旋转部件由n个散射中心组成,则合成调制散射回波复矢量为
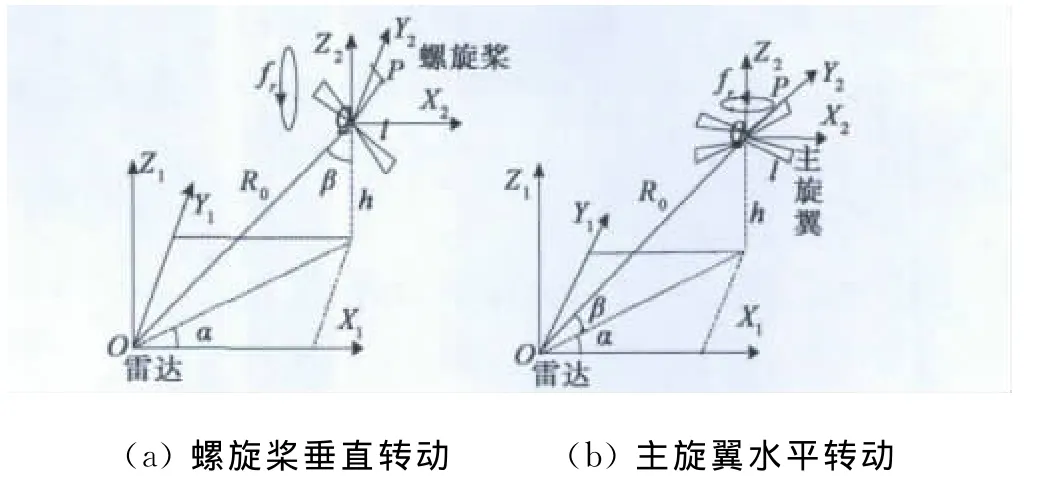
图1 雷达与旋翼间的相对运动关系

式中:ak和Ψk(t)分别为第k个桨散射的幅度和相位函数.
对叶片散射点回波积分,可得某t时刻,单桨调制回波为
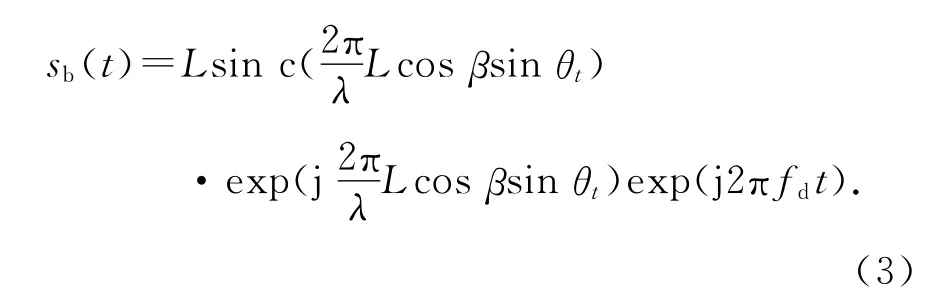
因此,N个桨的调制回波可表示为
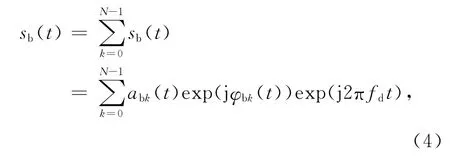
式中幅度分量abk(t)和相位分量φbk(t)分别为
式(3)经傅里叶变换可得理想旋翼回波JEM的频域特性
式(7)表明调制谱由一系列谱线组成,对于第m发旋转部件,谱线间隔为fTm=qNmfrm,由桨叶数Nm和桨叶转速frn决定,N1m为单边谱线个数.
理论参数模型表明:只要不同目标具有不同的旋转部件、结构参数和运动参数,其调制谱特性就有一定的差别,可将这些微特征作为飞机分类与识别的有效特征.
1.2 机身回波信号
机身运动可视为刚体平动,在雷达观测时间内,若直升机不做转弯等机动运动,可将其运动状态视为匀速运动,因此,对发射的线性调频信号,回波信号为单频信号,仅有一多普勒频移,其频移仅与目标相对雷达的径向速度有关.
2 特征提取理论方法
2.1 频谱特征提取
1)对称性特征
对于旋翼目标其金属叶片前后沿雷达散射截面(RCS)值相差较大,奇数叶片其微多谱勒频谱存在单边性,其微多谱勒频谱的正负区能量不对称;固定翼飞机的回波信号频谱为机身运动的单频信号,主频两侧为对称分布的杂波和噪声频谱.目标多普勒频谱分布的不对称性,可作为识别旋翼飞机和固定翼飞机的一个有效特征[14].去除点列x中心M 点,负频区顺序前N点频谱点列记为x(1),x(1)=(x1(1),x2(1),…,xn(1)),正频区逆序后N点频谱点列记为x(2),x(2)=(x1(2),x2(2),…,xn(2)),则对称性特征为
2)能量特征
对于旋转翼飞机目标,其旋翼调制引起频谱展宽,机身的多谱勒谱与调制频谱的能量相对关系可以作为一个有效特征[14],用于识别旋转翼目标,令
令

定义能量特征为

2.2 JEM调制特征提取
双谱分析方法具有较好的特征估计性能[11],取不同共轭位置谱三阶累积量,可得不同的双谱定义并产生不同的对称区域.对式(4)采用的复信号三阶累积量定义为

式中:s(k)为回波零均值复包络;s*(k)是s(k)的复共轭.其对应的双谱为
式(13)中令f1=f2=f得对角切片B(f,f).
对式(13)取m=n得到三阶累积量的主对角切片:

2.3 旋翼结构及运动特征提取
由式(4)可知,对于单个叶片回波,其微多普勒由exp(jφb(t))决定,其微多普勒为
由式(15)可知:直升机总回波的多普勒由N个相位等间隔的正弦曲线组成,其间隔为2πk/N;旋转速度决定微多普勒频率.以上分析可知,估计直升机回波中微多普勒正弦曲线个数可知叶片个数.
由(5)式可知,回波幅度为脉冲形式,且sinc函数在自变量为零时取得最大值,回波幅度取最大值的时刻是sin(2πfrt+θ0+2πk/N)=0.因此,可以通过估计回波信号幅度峰值闪烁频率估计出旋翼转速.
观察组护理后收缩压为(141.3±13.1)mm Hg、舒张压为(83.4±7.8)mm Hg、总胆固醇为(5.1±0.7)mmol/L、甘油三酯为(2.7±0.3)mmol/L、纤维蛋白原为(3.2±0.8)g/L;对照组护理后收缩压为(159.7±14.2)mm Hg、舒张压为(94.6±8.4)mm Hg、总胆固醇为(6.7±0.9)mmol/L、甘油三酯为(4.5±0.8)mmol/L、纤维蛋白原为(3.5±0.9)g/L,观察组各项指标改善情况优于对照组(P<0.05)。
假设已经估计出雷达波束与目标旋转平面的夹角β,且其频谱宽度和旋翼转速也已经估计出的情况下,可通过式(16)估计出目标旋翼长度为

3 仿真实验及结果
3.1 模型验证及结果分析
仿真中所用参数:雷达脉冲重复频率fPR=5 kHz,无遮挡Ar=1,旋翼有效桨长为L=L2-L1,雷达波长λ=0.43m,初相角θ0=0°,方位角α=0°,设飞机静止在高空,飞机相对于雷达的俯仰姿态角为β=30°,三类飞机的桨叶结构参数见表1所示.
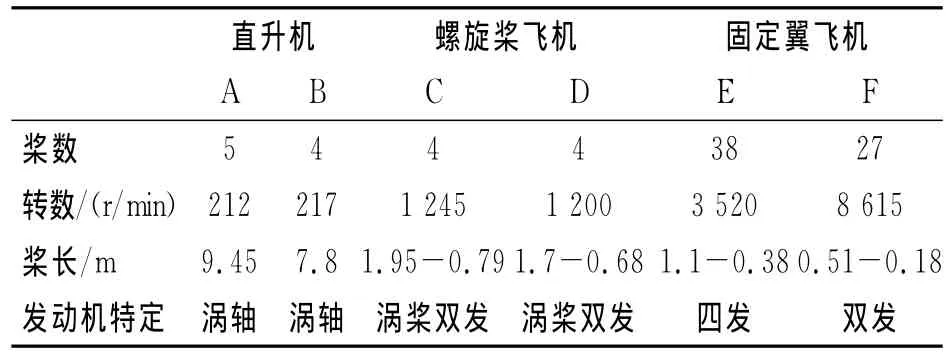
表1 三类飞机结构及运动参数
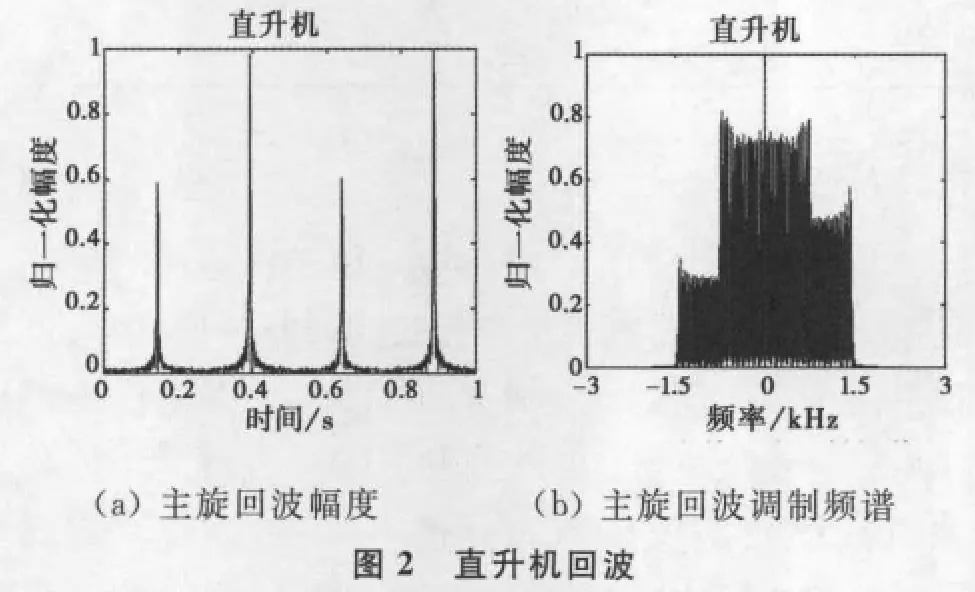
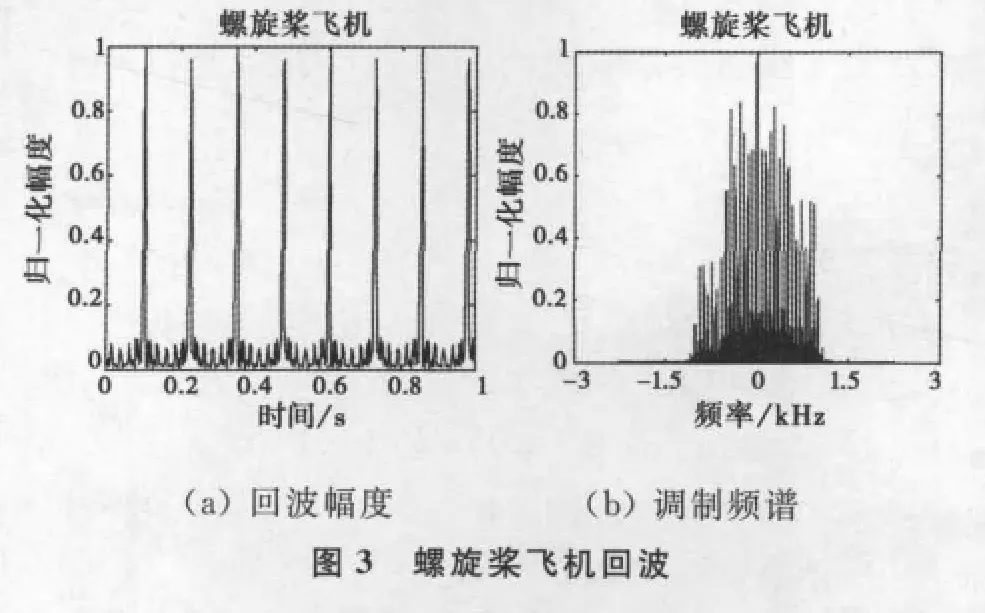
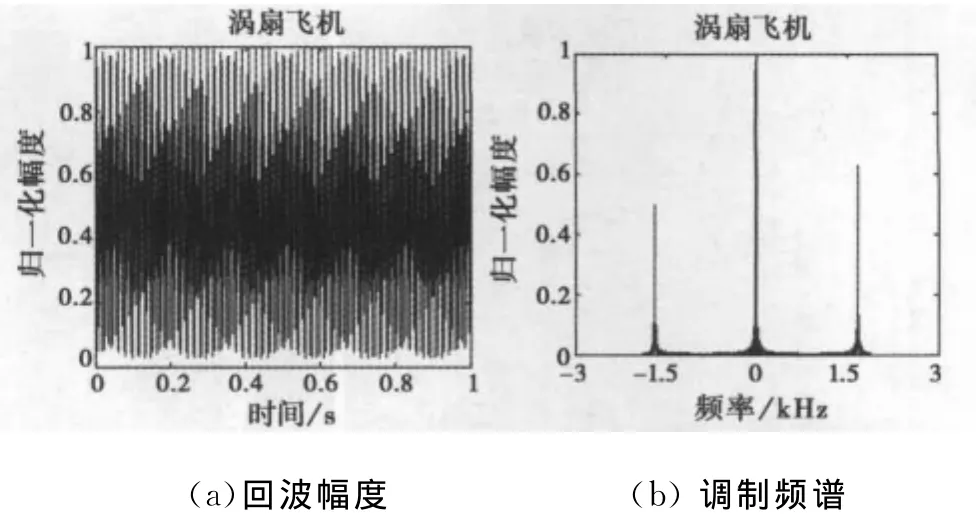
图4 涡扇喷气式飞机回波
由图2可知:直升机桨叶转速较慢,回波中大闪烁尖峰较少,频谱连续性较强,谱间间隔较小.由图3可知:螺旋桨飞机桨叶转速相对较快,回波在时域的抽样点增多,相应的闪烁尖峰增多,谱间间隔增大.由图4可知:喷气式飞机的涡扇高速旋转使回波闪烁尖峰的点数较前两种飞机明显增加,谱线也更加离散.
分析可知,对于固定参数的雷达,三类飞机旋转部件的桨数和转速不同是造成回波频谱差异的主要原因.低速旋转时闪烁尖峰较少,频率周期也相对较小;高速旋转时回波中闪烁尖峰较多,频率周期较大.比较图2~4可知:各类目标的调制谱宽度、能量等特征具有较大差别,可以利用它们区分不同类型的飞机,精确提取其调制周期特征,也可用于识别不同类型的飞机目标.在实际中,还应该考虑螺旋桨的遮挡对回波的影响,尤其是螺旋桨飞机的桨和喷气式飞机的涡扇,仅在正对雷达的很小角度内才有回波.
根据公式(3)~(7),按照表1中所给的B、D、E型号的数据设置仿真参数,三类飞机的幅度谱及频率谱如图2~4所示.
3.2 目标分类仿真实验及结果分析
基于第2节所提取的特征,提出了一种自动辨识飞机目标的快速实用方法,采用能量、对称性特征区分固定翼和旋转翼飞机,利用JEM特征区分直升机和螺旋桨飞机,再利用从回波中提取的叶片结构特征进一步识别旋翼飞机的具体型号.分类流程图如图5所示.
仿真试验中,对直升机只考虑主旋翼回波和机身回波,则直升机回波信号由主旋回波和机身单频信号组成,固定翼飞机回波信号为机身单频信号.对回波信号加入一定信噪比的高斯白噪声,然后进行采样后FFT计算,按照特征对两类飞机进行分类;通过比较螺旋桨飞机与直升机的结构差异,分析出其周期调制特征具有较大的类间差异,利用双谱估计法稳定地提取目标旋翼调制特征,然后与该型飞机的理论特征值比较,即可判别旋翼飞机是属于螺旋桨飞机还是直升机.
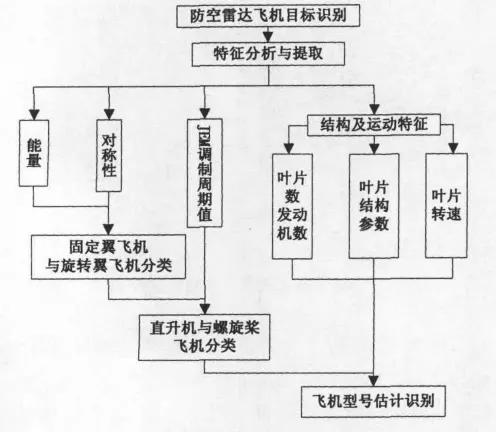
图5 飞机目标识别流程框图
根据对称性及能量的计算公式,得到三类飞机目标的对称性特征及能量特征分布图,喷气机对称性特征分布于0~0.01的区间内,螺旋桨的对称性特征主要分布于0.01~0.05的区间内,直升机受大的扇叶的影响,频谱对称性特征更明显;喷气式飞机的能量主要由机身多普勒分量组成,主频两边能量较弱,能量特征值一般处于0.002 5以下,而螺旋桨和直升机能量特征都远大于该值,经统计固定翼式飞机的能量及对称性特征分布,从而确定判定门限T1=0.01,判别固定翼与旋转翼飞机目标.
仿真参数设置:
1)雷达参数:与3.1节模型验证仿真参数一致;
2)飞机参数:飞机参数如表1所示,有效桨长为L=L2-L1,转速wr,桨叶数N;
3)其他参数:此时设飞机目标以速度ν=60m/s慢速飞行,目标与雷达距离R0=5km.
对回波信号加入信噪比为RSN=20dB的噪声,对每个飞机目标进行300次实验,每个型号飞机的前150个数据作为训练样本,后150个数据作为测试样本,利用统计学的方法得到特征的均值和标准差,利用特征的最近邻方法实现目标的分类,得到目标识别率,分类识别结果如表2所示.
从仿真实验结果可以看出,本文所采用的逐级最近邻分类方法是有效的,算法具有简单、实时性好的特点.文献[14]分别采用对称性和能量作为旋翼与固定翼目标分类的特征,对于这两类目标具有较高的识别率,但不能区分具有旋转翼的不同目标.文献[10-11]利用与旋翼扇叶个数及转速有关的JEM特征,对具备旋翼结构的不同类型飞机也有一定的识别效果.文献[13]采用脉间谱特征对三类目标分类,识别性能较好.本文方法综合利用了以上几种特征,不仅明显改善了有/无旋翼结构的不同类型飞机的正确识别率,而且也显著改善了具备旋翼结构的不同类型飞机的识别率,综合识别能力明显优于其他方法.进一步的研究表明,从高分辨率雷达回波中提取关于目标旋翼结构及运动参数等精细雷达特征,可达到飞机目标型号识别的目的.
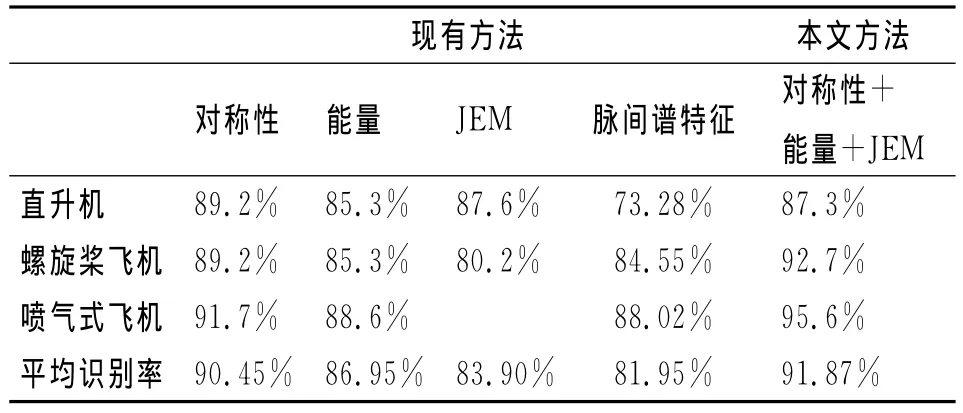
表2 不同特征下三类飞机的正确识别率及平均正确识别率
4 结 论
由于直升机具有大的旋翼,其调制特征明显区别于固定翼飞机,通过精确提取其调制周期特征,可以区别带有不同调制部件的飞机.本文提出的旋翼飞机目标辨识方法,充分利用了回波的频谱特征和调制特征,可实现有/无旋翼的不同飞机甚至具有旋翼结构的不同飞机目标的自动分类.仿真实验证明该方法比现有方法有更高的综合辨识能力和正确辨识率.
[1]吕金建,丁建江.弹道导弹识别技术发展综述[J].探测与控制学报,2010,32(4):7-14.LÜJinjiang,DING Jianzhong.Review of target recoginition techniques for ballistic missile[J].Journal of Detection &Control,2010,32(4):7-14.
[2]高红卫,谢良贵,文树梁,等.基于微多普勒特征的真假目标雷达识别研究[J].电波科学学报,2008,23(4):775-780.GAO Hongwei,XIE Lianggui,WEN Shuliang,et al.Research on radar target identification of warhead and decoys based on micro-Doppler signature[J].Chinese Journal of Radio Science,2008,23(4):775-780.(in Chinese)
[3]关永胜,左群声,刘宏伟.基于微多普勒特征的空间锥体目标识别[J].电波科学学报,2011,26(2):209-215.GUAN Yongsheng,ZUO Qunsheng,LIU Hongwei.Micro-Doppler signature based cone-shaped target recognition[J].Chinese Journal of Radio Science,2011,26(2):209-215.(in Chinese)
[4]CHEN V C,LI F.Micro-Doppler effect in radar:Phenomenon,model,and simulation study[J].IEEE Transactions on AES,2006,42(1):2-21.
[5]CHEN V C,LI F,HO S S,et al.Analysis of micro-Doppler signatures[J].IEE Proc-Radar Sonar Navig,2003,150(4):271-276.
[6]CHEN V C.Micro-Doppler effect of micro-motion dynamics:a review[J].Proc of SPIE,2003,5102:240-249.doi:10.1117/12.488855.
[7]CHEN V C.Analysis of radar micro-Doppler signature with time-frequency transform[C]// Proceedings of the 10th IEEE Workshop on Statistical Signal and Array Processing.Pocano,2000:463-466.
[8]RAJ R G,CHEN V C.Analysis of radar human gait signatures[J].IET Signal Processing,2010,4(3):234-244.
[9]GRENEKER G,GEISHEIMER J.Extraction of micro-Doppler data from vehicle targets at X-band frequencies[J].Proc of SPIE,2001,4374:1-9.
[10]丁建江.对空情报雷达自动辨识螺旋桨飞机[J].电子学报,2005,33(B12):2386-2390.DING Jianjiang.Automatic identification of propellers in surveillance radar[J].Acta electronica Sinica,2005,33(B12):2386-2390.(in Chinese)
[11]丁建江.常规雷达JEM特征分析与目标分类的研究[J].电子与信息学报,2003,25(7):956-961.DING Jianjiang.Studies of analysis of JEM signatures and classification of targets in the conventional radar[J].Journal of Electronics and Information Technology,2003,25(7):956-961.(in Chinese)
[12]丁建江,张贤达.常规雷达飞机回波调制特性的建模[J].系统工程与电子技术,2003,25(11):1407-1410.DING Jianjiang,ZHANG Xianda.Modeling of the modulation signature for aircraft returns in the conventional radar[J].Systems Engineering and Electronics,2003,25(11):1407-1410.(in Chinese)
[13]陈 凤,刘宏伟.基于特征谱散布特征的低分辨雷达目标分类方法[J].中国科学:信息科学,2010,40(4):624-636.CHEN Feng,LIU Hongwei.Based on the characteristics of the spread spectrum characteristics of low resolution radar target classification method[J].Science China Information Science,2010,40(4):624-636.(in Chinese)
[14]陈行勇.微动目标雷达特征提取技术研究[D].长沙:国防科技大学,2006.CHEN Hangyong.Research on Radar Signature Extraction from Target with Micro-motions[D].Changsha:University of Defense Technology,2006.(in Chinese)
[15]李 琨,曾勇虎.直升机旋翼雷达特征信号分析[J].电光与控制,2009,16(5):23-26.LI Kun,ZENG Yonghu.Analysis of radar signatures of helicopter rotary blades[J].Electronics Optics &Control,2009,16(5):23-26.(in Chinese)