仿生蛇形机器人的设计及研究
2013-03-11卢亚平宋天麟
卢亚平,宋天麟
(苏州大学 应用技术学院,江苏 苏州215325)
随着仿生学的发展,人们把目光对准了生物界,探索新的运动模式有了新的进展。蛇是无四肢动物中最庞大的一类,在几千年的进化历史中,它能进行多种运动以适应不同的生活环境(如沙漠、水池、陆地、树林等)。仿蛇形机器人就在这种背景下诞生了。蛇形机器人可适应各种复杂地形的行走,如在战场扫雷、侦测、爆破、矿井和废墟中探测营救、管道维修以及外行星地表探测等[1],其性能优于传统的行走机构,在许多领域具有非常广泛的应用前景。本文通过对蛇的运动方式进行分析并就仿生蛇的关节结构进行设计,提出系统控制方案。
1 蛇类运动研究
在自然界的不同环境中,生存着不同种类的蛇,它们的运动方式也有所不同,大致可分为以下几种:(1)蜿蜒运动:蛇体摆动近似于正弦波的规律,依靠腹部蛇鳞与地面的摩擦作用产生推动力。蜿蜒运动时,蛇体作横向的波动,形成若干个波峰和波谷,在弯曲处的后边施力于地面,沿从头部到尾部方向传播,由地面的反作用实现运动。(2)伸缩运动:在蛇通过长直的狭窄通道时常采用这种运动方式。该运动可分为两个节拍,先以前部作支撑,收缩肌肉向前拉后部,再以后部作支撑,通过肌肉收缩向前推动前部。这种运动的效率比较低。(3)侧向移动:这种运动常见于生存在沙漠中的蛇类。运动中蛇腹始终都只有很小的部分与地面接触,而相邻接触部分之间的躯体是抬起的,分顺序接触地面,然后抬起,依次循环,产生一个侧向的运动。这种运动的效率比较高,能获得较大的加速度,适合在柔软的沙地运动。
在以上运动方式中,最常见的是运动效率最高的蜿蜒运动,然后是伸缩运动,侧向运动比较少见。通过对蛇的运动分析可见,无论哪一种运动方式,都可以看成是一系列的波形传递,如图1所示。YZ平面沿Y方向上下运动,实现伸缩运动;XY平面沿Y方向左右运动,实现蜿蜒运动;如果YZ平面和XY平面沿Y方向进行空间复合运动,就产生所谓的侧向移动[2]。

图1 蛇运动方式的波形传递
考虑仿生蛇设计的便利性,选择蜿蜒的运动方式,并假设以正弦波传递。可以知道在波形传递过程中各个关节相对旋转角度的变化,从而控制波形稳定地向前推进。蛇形机器人是一个多连杆系统,通过各相邻连杆的协调动作向前推进。Serpenoid[3]曲线己经被广泛应用到蛇形机器人上,以Serpenoid曲线为例对蛇形机器人的运动步态进行规划。Serpenoid是指一个穿过X-Y坐标系原点的曲线,如果满足以下条件,就可以被称为蜿蜒曲线:

其中a、b、c三个参数将决定曲线的形状,通过改变Serpenoid曲线的这三个参数,既可以改变蜿蜒曲线的传播波型、传播幅度,也可以改变曲线的传播方向。由Serpenoid曲线的定义可得到N关节组成的近似Serpenoid曲线蛇型机器人蜿蜒运动的角度。
2 仿生蛇形机器人结构设计
设计了仿生蛇形机器人三个部分的关节模型,分别是头部关节、驱动关节和尾部关节,并用计算机辅助设计软件UG NX7.0绘制出了各个关节的模型。蛇形机器人的加工材料有硬铝、PVC塑料、ABS塑料、树脂等,考虑到机械加工性能、塑性、韧性、强硬度等,最终选定了光敏树脂。加工方法选择快速成型加工,其核心思想是离散堆积成型。运用激光快速成型技术,加上最适合该技术的光敏树脂材料,加工理想的关节实物[4]。
2.1 仿生蛇形机器人驱动关节设计
仿生蛇由13个关节串联而成,每个关节都具有一个独立的自由度,前3个关节(舵机11、12、8)负责蛇形机器人抬头和摇头动作,从第4个关节开始为驱动关节,通过关节(舵机)0、1、3、4、6、7、9、10相互配合完成蜿蜒运动,模拟蛇形曲线推动整个蛇形机器人身体的前进。关节(舵机)2、5完成转弯,蜷缩动作。图2所示即是运用UG NX7.0软件绘制的仿生蛇形机器人驱动关节建模。

图2 驱动关节的UG建模
2.2 仿生蛇形机器人尾部设计
仿生蛇形机器人尾部设计不仅要考虑外型,还要把它设计为整个系统的动力来源,因所需控制舵机较多,电源采用锂聚合物电池。电池较重,为满足运动要求,需安放在蛇的尾部。图3所示即为运用UG NX软件绘制的仿生蛇形机器人尾部关节建模。
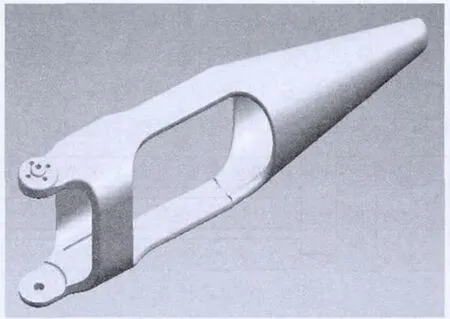
图3 尾部的UG建模
2.3 仿生蛇形机器人头部设计
仿生蛇形机器人头部设计是模仿人脑的功能,它集超声波测距模块(仿生蛇眼)、声控电路模块(仿生蛇耳)、MCU控制模块(仿生蛇大脑)、32路舵机控制模块(仿生蛇小脑)等重要控制单元为一体,如图4所示。其中MCU控制模块为上位机,负责各信息的处理;舵机控制模块为下位机,负责各舵机角度的控制,完成基本动作要求。因各模块结构复杂且尺寸不一,因此无法通过快速成型加工得到较合适的蛇头模型,只能采取手工加工完成头部的设计,再用电路板直接拼装而成。其中,采用U形金属支架连接舵机和头部,使蛇形机器人可以做到抬头和低头的动作。仿生蛇形机器人关节连接如图5所示。

图4 仿生蛇形机器人头部结构
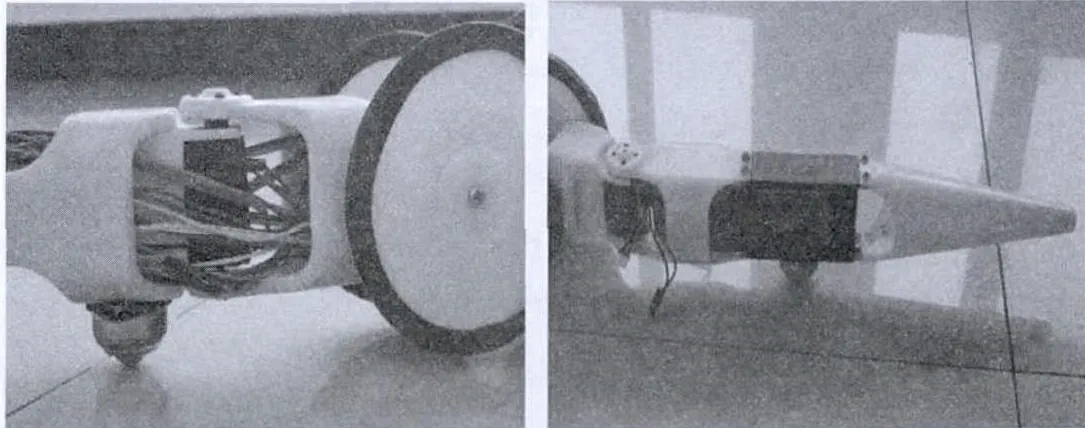
图5 仿生蛇形机器人关节连接
3 仿生蛇形机器人控制系统设计
蛇形机器人基本的设计思想是通过改变各个关节之间相对运动角度来使蛇体达到相应的运动姿态,从而实现蛇体的运动。通过对蛇类蜿蜒运动的研究,计算出蛇在不同运动形态的各个关节之间的相对转角的公式,通过控制每个关节的转角,实现蛇的连续蜿蜒运动。整个控制系统设计框图如图6所示。即将主控单元通过扩展板进行扩展,将32路舵机控制板、超声波传感器模块和声控模块连接为一整体,通过扩展板将各个模块与主控单元协调控制,实现对机器人的控制。
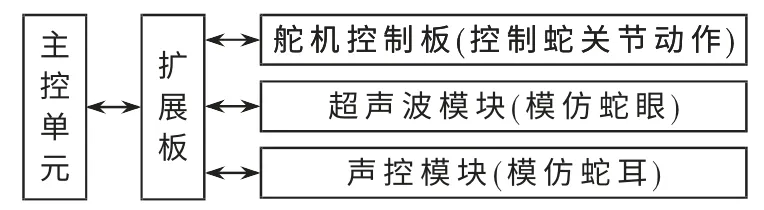
图6 控制系统框图
蛇形机器人的主要控制流程包括声控信号检测、超声波距离检测、蜿蜒前进模式、蜷缩模式、警觉模式等,如图7所示。在系统运行后,程序即进入蜿蜒运动控制状态,同时不断扫描声信号和分析超声波测距传感器所收集的距离信号,当声信号强度超过调定的阈值信号后,系统进入蜷缩模式和警觉模式;当超声波测距传感器采集到前方障碍物距离小于30 cm时,系统进入避障模式,由蛇形机器人颈部的舵机控制头部左右摇动,超声波传感器采集两侧的距离信号,通过比较后,转弯避开障碍物,继续做蜿蜒运动前行。

图7 蛇形机器人控制流程图
主控单元采用Arduino的AVRmega168-20PU微控制器与32路伺服舵机控制器串口连接,通过主控单元上位机给伺服舵机控制器传递控制指令,即可实现多路伺服舵机的单独控制或同时控制,控制指令精简,控制转角精度高,以至能够完成蜿蜒前进、转弯、蜷缩等动作。
蜿蜒前进根据Serpenoid曲线公式,设置蜿蜒舵机角度,各舵机角度如表1所示。舵机转角范围一般为180°,居中时角度为90°,控制舵机的PWM范围一般为500~2 500,居中90°时的脉宽数为1 500[5]。
蜿蜒运动程序编写如下:

表1 蜿蜒舵机在各时刻角度表
注:#为舵机号,P为脉宽数(500~2 500),S为速度,T为动作完成时间。
本文所有设计图都是在UG中完成的。历时3个月完成实体,使用资金约15 000元,获得江苏省第四届大学生机器人大赛创新设计组一等奖。整体组装结构如图8所示。本设计虽然完成了基本动作但还存在许多不足之处,由于舵机的扭力大小关系,无法使仿生蛇的所有竖直方向上的关节都能够完成预想的动作。但是还是能够使仿生蛇大体上完成预想的动作,包括水平转动、蜿蜒前进、声控后的动作等。建议以后改进时把万向轮安置在所有关节底部,使其保持在一条水平线上,然后使用一个大功率的驱动元件放置在蛇头之后的一个关节上来单独负责前进的驱动力,舵机则负责水平和竖直的转动。这样就能使仿生蛇比较灵活地转动,不受摩擦力的约束,同时又能使蛇正常前进。
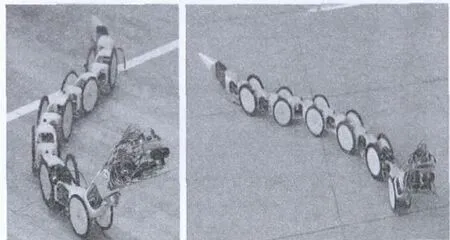
图8 仿生蛇整体组装结构图
[1]王立权.机器人创新设计与制作[M].北京:清华大学出版社,2007.
[2]黄恒,颜国正,熊翔.蛇形机器人的运动策略[J].电机与控制学报,2002,6(3):249-251.
[3]孙洪,马培荪.蛇形机器人一种基于serpenoid曲线的蠕动步态[J].机械设计与研究,2008,24(1):39-41.
[4]宋天麟,王立军.蛇形机器人的研究与开发[J].机械制造与自动化,2005,34(6):120-121.
[5]卢亚平,宋天麟.基于舵机控制的防生鱼设计[J].微型机与应用,2011,30(14):72-74.
