运用半导体激光器进行监听以及音源定位的研究*
2013-03-11潘丽娜庄紫云张学典
潘丽娜,庄紫云,王 戈,张学典
(1.上海理工大学 光电信息与计算机工程学院,上海 200093;2.同济大学 第一附属中学,上海 200438)
引 言
窃听技术由于其重要的应用意义,一直没有停止过发展。如今监听技术已经广泛使用在战争情报获取、侦破案件等重要领域。如战争中,为得知敌方相互之间联络的内容,常把电线接在敌方通讯线路上进行窃听,以掌握战争之主动权。现在的案件侦破中,安全人员把微型无线话筒放在嫌疑人经常出没的地方,监听他们谈话内容,掌握确凿的证据。监听要求相当隐蔽,不易被发现,所以需要采用各种巧妙的方法与技术。其中激光监听由于其不易被发现,不用安装等优点,发展逐步成熟,并走向应用。
采用激光技术进行监听,可以听到戒备森严,人无法接近的房间内的声音信息。激光窃听具有监听距离长,不易被发现,无需提前安装设备等优点。
目前普遍的激光监听实验是采用一个有玻璃(镜子)窗的木箱(模拟房屋),在箱内放一部收录机,当收录机放音时,声波使木箱上的玻璃产生振动,经玻璃反射的激光束光斑也随之发生振动,即反射的激光光束就带有了收录机的声波信息。当振动的光斑照射在硅光电池上时,光点面积也就发生了相应变化,经光电转换可以得到声音信号[1]。但这仅仅停留在实验阶段,尚未得到真正的应用。
文中通过分析激光监听技术的基本原理,提出实地进行长距离监听的方法和对声源进行定位的算法,并探索如何获得更好的监听效果的方法。
1 基本原理与实验装置
1.1 基本原理
系统的原理框图如图1所示,由激光器以一定的角度发射两束激光打在监听目标所在的房间两扇窗户玻璃上,在各自反射角方向接收调制过的激光信号,光信号通过光电转换,得到微弱的电流信号,再对信号进行电流转电压、滤波以及放大处理,还原为清晰的音频信号。
对接收到的两个音频信号进行最大相关性拟合计算,可以获得音频所在的位置。
1.1.1 声音振动信号至光电流信号的转换
理论上,声音是由物体振动产生,以声波的形式传播[2]。室内传播的声波遇到玻璃使其产生微小机械振动,从而使反射光斑做线性振动。如图2(a)所示,L 为系统到玻璃的距离(10~15m),X 为从接收屏到光源的距离,设原始的声音信号为S(t),玻璃面振动Z(t),光斑振动L(t),最后电信号为E(t),可以根据相似三角关系得出:
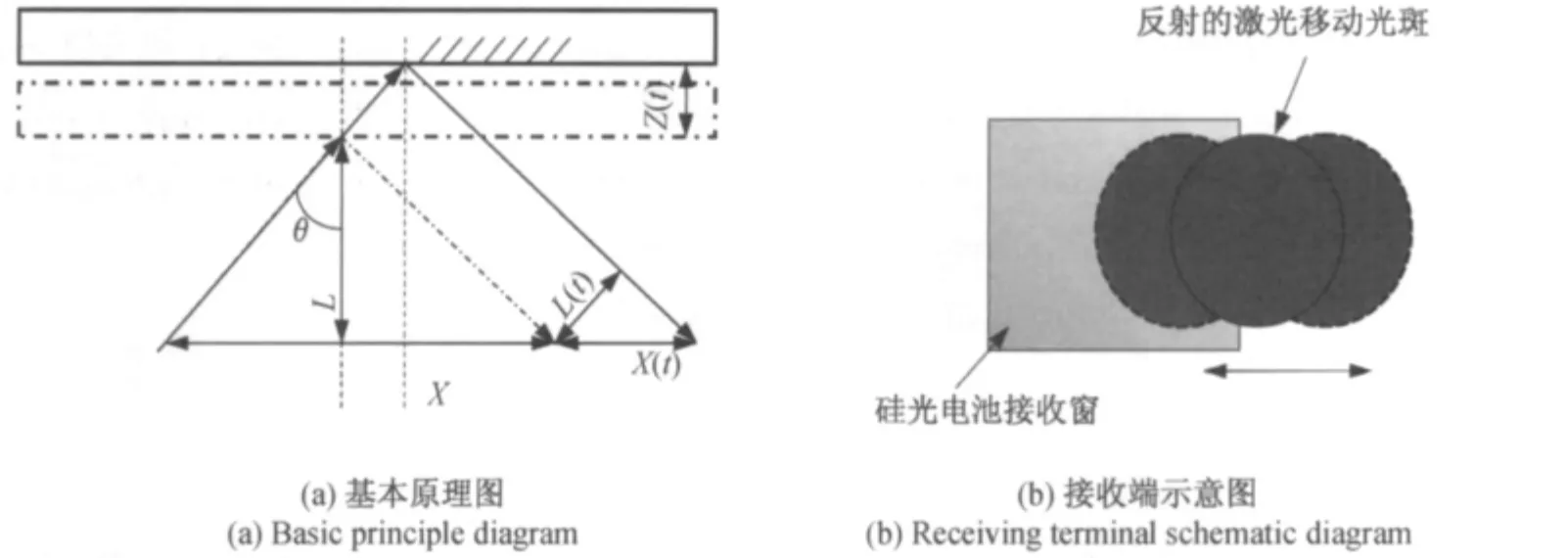
图2 基本原理示意图Fig.2 Basic principle diagram
由于玻璃的振动与声音信号呈线性关系,有:

其中,系数a与传输距离、空气环境、玻璃的材质等相关。
根据光的反射定律,θ为入射角,假设接收器是垂直于反射方向,则光斑在硅光电池边沿的位移L(t)为:

由于入射角在整个过程中是不变的,因此也属于线性关系,设比例系数为b,有:

硅光电池接收到的光斑面积因光路偏移而发生变化。假设光斑分布均匀,光斑面积的瞬时变化为ΔA,有:

设输出电流的交流部分为ΔI,有:

式(5)、式(6)中,c、d 为比例系数,因此最终的电流信号为:

综上所述:最后得到的电流信号与原始声音信号呈线性关系,实际情况经过试验也证明了其线性关系。整个系统完成了声音信号—玻璃振动—光信号—微弱的电信号—放大—还原成声音。
1.1.2 声源定位
基于时延估计的声源定位方法是近几年发展起来的一种传声器阵列声源定位方法[3]。声源定位技术是通过声学传感装置接收声波将其转化为电信号再利用该电信号进行分析处理,从而实现对声源位置进行探测识别并对目标进行定位及跟踪的一门技术。声源定位的方法中基于到达时差(time difference of arrivals,TDOA)的源定位方法的计算量一般比较小,有利于实时处理。这类方法可以适用于像语音这样的非平稳宽带信源,在只有单个信源时能较好地工作,定位的精度与的估计精度有关[4]。
TDOA 研究的核心是时延估计分析。时延估计分析的方法有很多,而利用比较广泛的是广义互相关法。由于本系统主要应用在室内场所,其噪音空间相对平稳以及混响相对较小,故采用运算量较小的广义互相关(generalized cross correlation,GCC)方法[3]来对第一步的时延进行估计分析。
模型如图3所示,在室内的特定地点摆放声源,声源距离窗户的距离L0是固定的。分别用两个相同的激光发射系统以同样的方向分别发射两束激光至玻璃窗户上,在各自的反射角方向放置相同的监听接收装置。声源距离激光达到玻璃的两个靶点分别为R1、R2,两个靶点相距L3。当获取到两个靶点返回来的声音信号,并对其进行滤波放大处理以后,利用声源定位算法求出声源距离两个靶点的水平距离L1,L2。
相关分析是比较两个信号时间域相似程度的基本方法。假设两个接收装置接收信号的离散事件信号模型为:
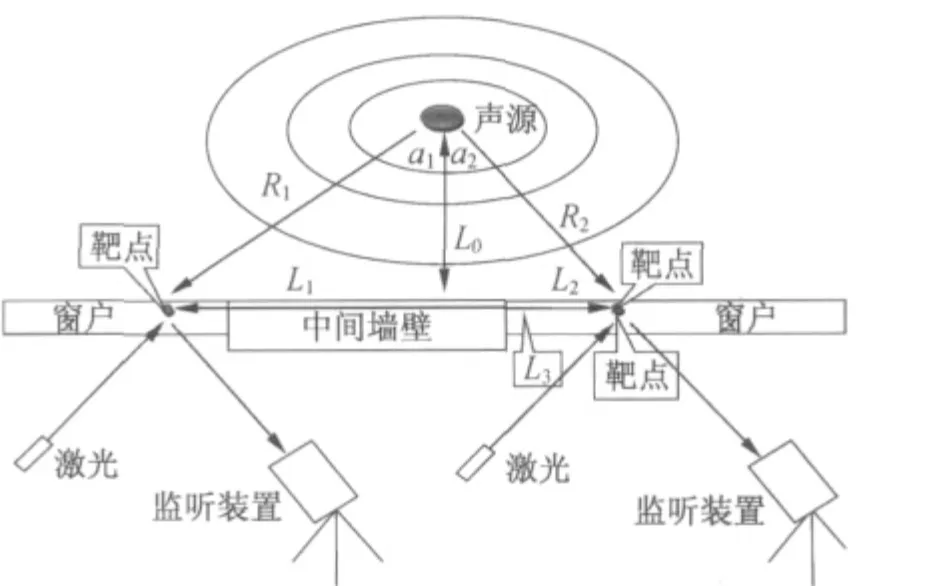
图3 系统装置构成图Fig.3 System device constitution diagram

其中Sn(n-tn)为声音信号,Nn(t)为噪声信号。Sn(n-tn)和Nn(t)是互不相关的,Nn(t)之间也是互不相关的。t1和t2是声波从声源处发出到监听装置接收到信号的时间,则t12=t1-t2就是两个接收端接收到信号的时延。
X1(n)和X2(n)的相关函数R12可以表示为:

将式(8)和式(9)代入式(10),得:

由于Sn(n-tn)和Nn(t)之间互不相关,用RS表示S1(n-t1)、S2(n-t-t2)的相关函数,所以上式可得:

由自相关函数的性质可知,当t-(t1-t2)=0时,R12达到最大值[5]。
由式(12)可以获得时间差t1-t2,由时间的延迟,已知系统到玻璃的距离L(10~15m),假设此时室内的声音传播速度约为380m/s,则可以算出声源的位置。
1.2 实验装置
基于上述实验要求,该系统主要包括两部分:发射装置和接收装置。使用到的实验装置有:普通家用有源音箱、功率为5mW 波长为650nm 的红光激光发射器、硅光电池、自制遮光圆筒、三脚架、微弱电信号放大电路、电烙铁、双面胶等。
1.2.1 发射装置系统
发射装置如图4(a)所示。发射系统由电源、半导体激光器以及设计的光路组成。电源采用便携式电池,发射器选取的是650nm 半导体激光器,原因是激光单色性好、相干性好、方向性好、有很好的大气传输特性,并且成本低,可见光便于光路调整。
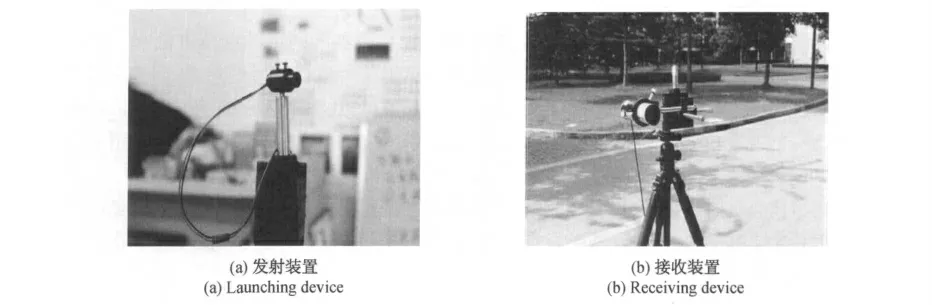
图4 系统装置图Fig.4 System devices
1.2.2 接收装置
接收装置如图4(b)所示,由光学聚焦镜、硅光电池、滤光片组成。滤光片可以消除不同环境下日光的干扰,避免传感器的饱和。凸透镜将光线聚焦至焦点后,使光斑作用在硅光电池上,提高接收系统的信噪比。
1.2.3 信号处理部分
由于硅光电池输出的是电流信号,并且交流部分较小,而带有较大的直流成分,因此必须采用电流转电压电路和放大电路,对微弱的交流信号进行放大,同时抑制直流成分。图5(a)为信号处理步骤的框图。图5(b)所示的是电流转换电压电路,其中Ii1所示的是由硅光电池输出的是电流信号,Uo1为转换后输出的微弱电压信号。
放大电路的要求如下:高增益、低噪声;高精度、高共模抑制比;大输入阻抗、低输出阻抗;足够的带宽和负载能力;线性度高、漂移小。为达到以上要求,选用AD620来构建放大电路。
AD620为仪用放大器,具有良好的、稳定的性能。从芯片特性可以看出,该芯片具有较宽的供电电压范围,较低的噪声,足够的带宽(120kHz),满足使用需求。AD620的放大倍数G 通过外接反馈电阻RG决定,RG单位为kΩ。可以通过以下公式计算:

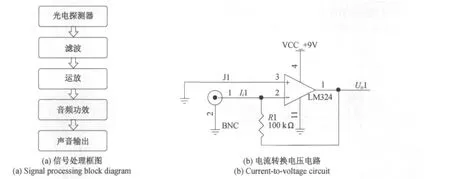
图5 信号处理部分Fig.5 Signal processing part
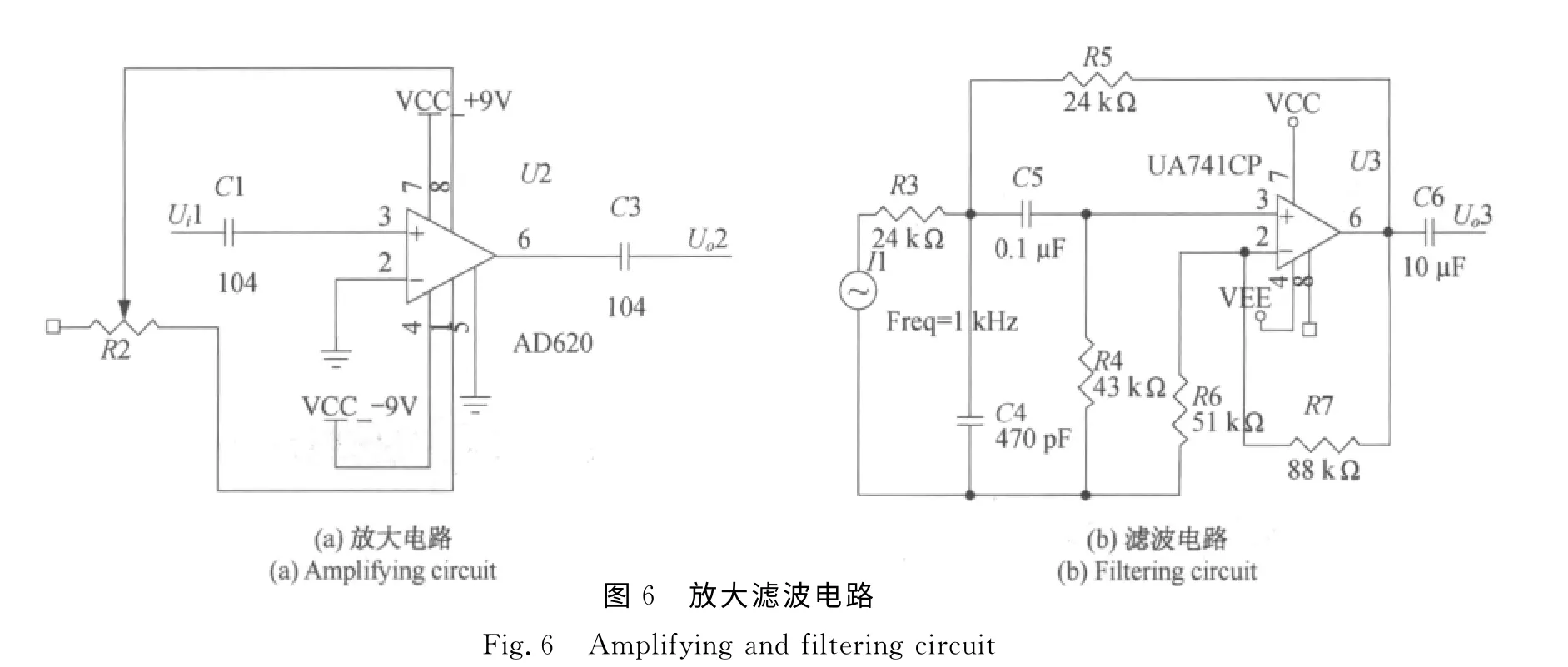
AD620采用单端输入,电路图如图6(a)所示。在输入端前加一个电容C1,一方面起隔直流作用,另一方面限制放大器的带宽,防止高频的电磁波噪声经放大器放大。反馈电阻(R2)采用可变电阻,这样在调试时可以方便调整放大倍数。
选择741运放芯片来构建有源滤波电路。由于滤波器的带宽较窄,且对滤波平坦性要求不高,因此可以采用单片741来构建带通滤波电路。该电路参考了文献[6]中的电路。中心频率为1kHz,3dB频带约为0.2~4kHz,覆盖了人声的音频范围。电路原理图如图6(b)所示。
2 实验结果与分析
2.1 实验结果
图7 所示的是音频采集与声源定位软件。该软件具有除噪、滤波、录制、播放、音频定位等功能。音频采集与声源定位软件在接收完信号以后,通过调用MATLAB软件对信号进行数字滤波并放大。现场实验也得到了应有的效果。
经过长时间的重复实验和改进,得到了较多比较理想的实验样本。软件滤波效果如图8所示,其中图8(a)所示的是未经过处理的音频样本,带有较大的环境背景噪声,内容为一位中年女性依次朗读阿拉伯数字1~10,其中时间间隔为1.5s。图8(b)是对图8(a)中的音频波进行滤波除噪,获得的音频波形,可见滤波除噪效果显著。

图7 软件界面Fig.7 Software interface
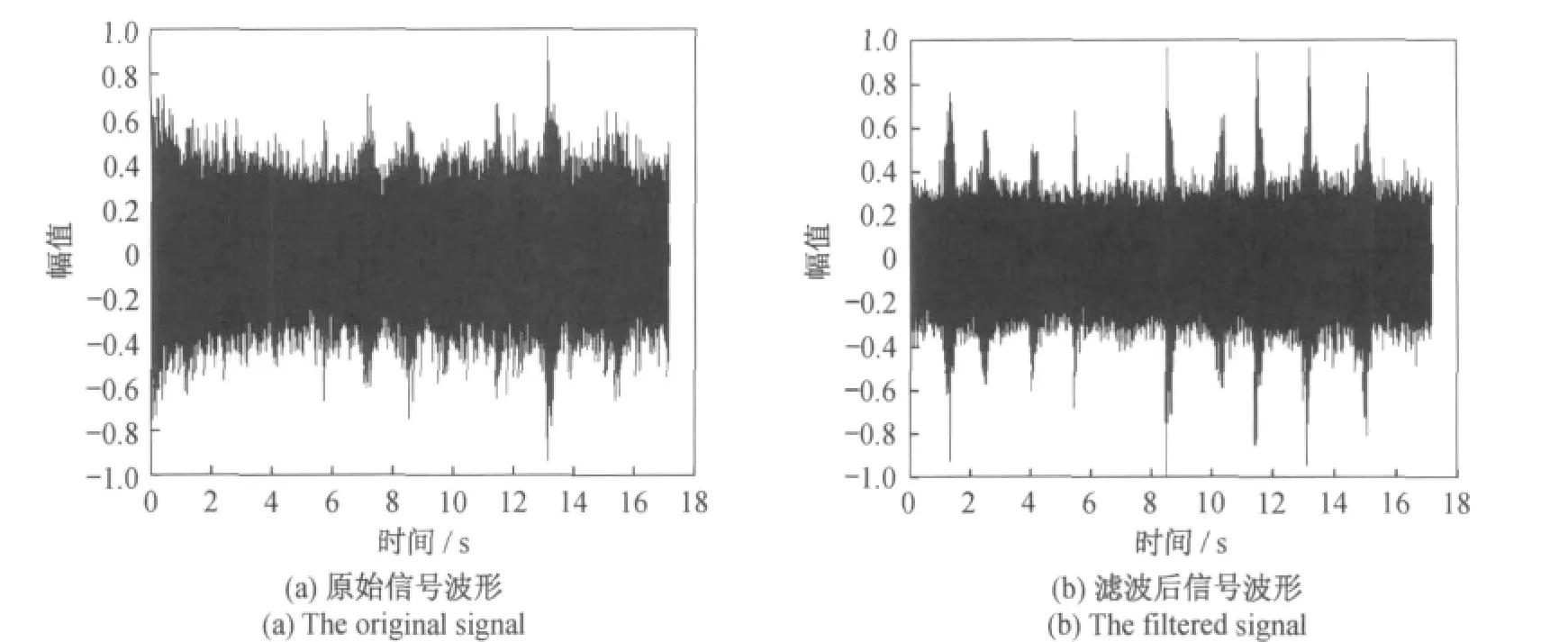
图8 软件滤波效果Fig.8 Software filtering effect
音频采集与声源定位软件所录制的音频是两个声道的音频,得到两组相似并且存在时延的音频信号后,利用GCC做相关性分析。图9(a)是采集到的两个声道的音频样本,上图是左声道,下图是右声道,两个波形有细微的时间延时。通过GCC相关性分析可以得到如图9(b)所示相关性分析图,结合图3所示的模型,可以计算出这个微小的时间延时[7]。
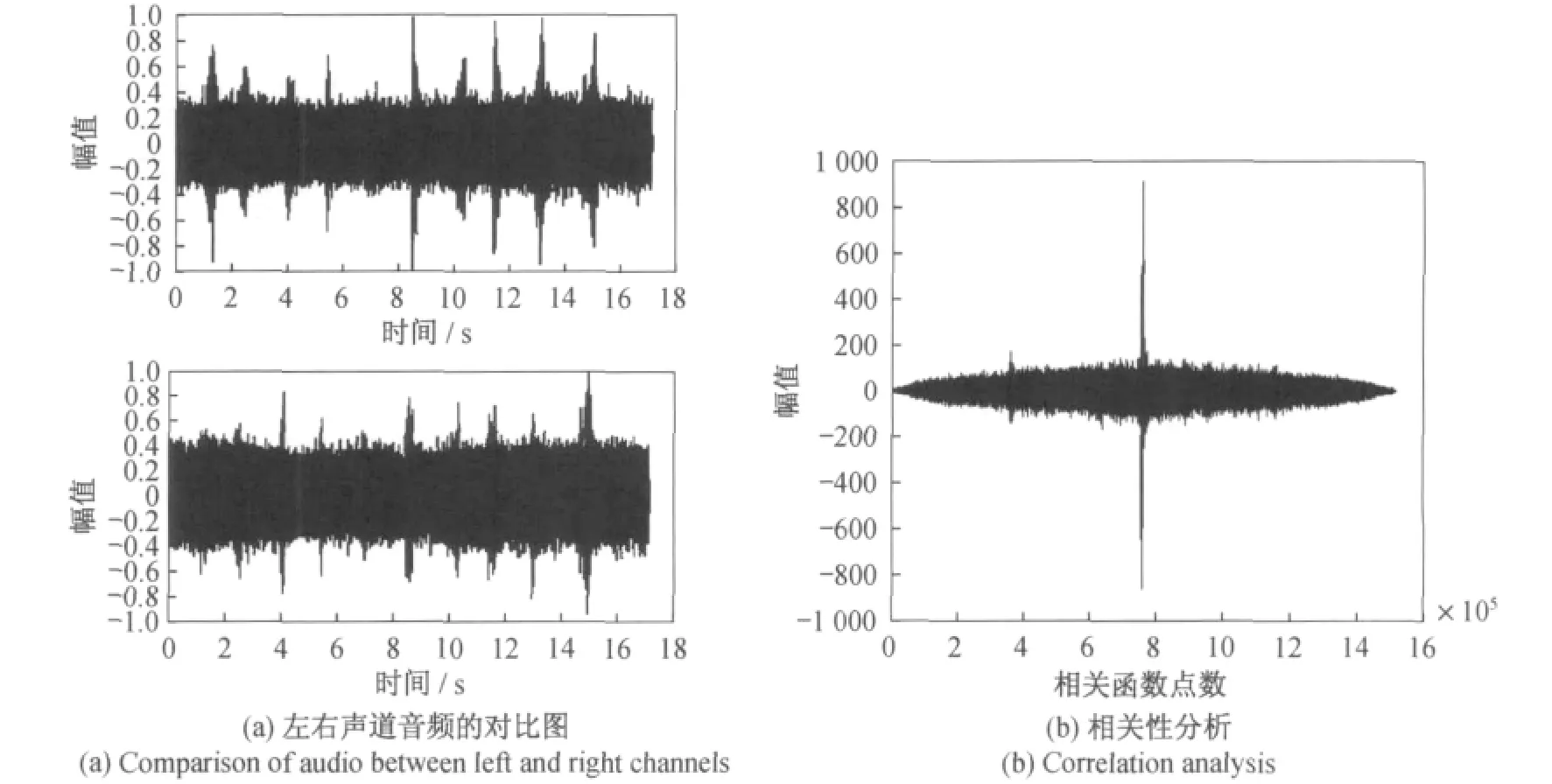
图9 利用GCC对音频定位Fig.9 Audio positioning using GCC
2.2 干扰因素分析
实验结果表明,有一些不可避免的干扰因素会影响监听和定位结果,造成监听音质有损和定位精确度下降,归类为以下几点:
(1)玻璃表面的洁净程度,洁净程度越高,反射光光强度越大,监听效果就越好;
(2)空气中的粉尘等颗粒物,会对光波进行阻挡导致失真,引起多杂音;
(3)外界环境光的干扰,可以通过单色滤光片和遮光罩来减小其对音频的质量影响;
(4)距离不可过大,因为距离增大,光路变长,使接收器接收的光斑变大,从而导致接收器灵敏度降低。虽然激光的方向性较好,但普通激光器的光束在较长距离上仍然会形成较宽的激光光束,在玻璃上形成弥散斑;
(5)风力的干扰作用会使玻璃产生轻微的振动,这会给监听的声音引入比较大的噪音,从而影响监听效果。
3 结 论
通过理论分析和实验仿真,实现了激光监听并且定位的功能。在室内声源音量为40~90dB的范围内,可以得到清晰的监听音质和定位效果。利用激光进行监听,要实现好的监听效果,仍然有许多地方需要继续研究和改进。为了保证监听的隐蔽性,可以改用红外光,同时更改相应的光电探测器。因为红外光是不可见光,在调光路的时候,可以带上耳机寻求最好效果点辅助调光路。另外,对其光路要求严格,如不能快而准地接收到反射光,就不能达到监听目的。可利用“猫眼”效应,实现发射机与接收机的组合,从而方便监听的选址,并实现自动判断是否瞄准目标,这样很大程度上缩减准备时间,达到更快更好监听的目的。
[1] 戴 玮,沈建华.激光监听实验的开设与研究[J].大学物理实验,2009(4):44-47.
[2] MORSE P M.振动与声[M].南京大学翻译组,译.北京:科学出版社,1974.
[3] 龚文汀.时延估计技术[J].舰船科学技术,1990(4):21-33.
[4] 林福严,王 力,伟雷冀.声源定位中声音到达各阵元时延估计的虚拟仪器实现[J].信息化纵横,2009,28(13):34-36.
[5] 严素清,黄 冰.基于广义互相关的时延估计算法研究[J].信息技术,2005(12):26-28.
[6] 赵官华,唐 芳.激光监听演示实验仪器的制作[J].物理与工程,2010,20(3):62-64.
[7] 潘 岳,王 健.双马赫—曾德尔型干涉仪定位技术研究[J].光学仪器,2012,34(3):54-59.