基于机载激光点云数码影像外方位元素自检校
2013-03-10崔红霞苏国中赵绪辉
崔红霞,苏国中,赵绪辉
(渤海大学信息科学与技术学院,锦州121013)
基于机载激光点云数码影像外方位元素自检校
崔红霞,苏国中,赵绪辉
(渤海大学信息科学与技术学院,锦州121013)
为了研究航空数码影像的高精度定向,采用机载激光点云为虚拟地面控制点构建了航空影像与虚拟控制点的几何关系模型;一个地面点成像在多张数码影像上,为此基于所有同名光线交于一点的原理构建了自检校的几何模型和误差方程,构建并解算法方程获取到高精度定向数据。结果表明,此方法达到了无地面控制点的影像外方位元素自检校的预期结果。
图像处理;空间后方交会;共线方程;外方位元素
引 言
机载激光探测和测距(lightdetectionandranging,LiDAR)系统是一种安装在飞机上的主动式对地观测系统,是20世纪90年代初投入使用的一门新兴技术,机载LiDAR系统结合激光扫描系统、全球定位系统(globalpositioningsystem,GPS)及惯性测量单元(inertialmeasurementunit,IMU)快速准确地获取地面3维信息[1]。机载LiDAR系统一般都附带了电荷耦合元件(charge-coupleddevice,CCD)航空数码相机,在获取激光点云数据的同时获取光学影像,二者结合可快速获取正射影像以及高精度数值地形[2]。激光雷达点云和光学影像两种数据的采集特点不同,它们之间具备很强的互补性,例如激光点云具有离散化的特点,正好与影像的具有整体性和连续性的特点互补;而激光点云的边缘信息弱导致其测量精度低的特点则与影像的边缘信息强的特点互补,此外,影像颜色信息丰富正好可以弥补激光点云强度信息贫乏的缺点等。因此,关于如何利用二者互补的特点,达到影像与激光点云的高精度配准及快速信息融合的问题的研究成为业界关注的热点。基于数字摄影测量的方法,利用两幅或者多幅重叠的影像,以多视影像自动匹配的方法获取同名特征点;再利用各自影像已知的定位定向数据也就是外方位元素,以多基线空间前方交会原理同样可以生成一个3维点云;从而激光点云数据和相同区域影像的配准为两个3维点集合之间的配准,这是目前业界常用的方法。显然,影像之外方位元素是两个3维点集之间配准的关键,通过获取精确的外方位元素,可以达到匹配激光点云与相应影像数据的目的。而机载LiDAR系统的影像的外方位元素是基于同平台机载定位定向系统(position and orientation system,POS)直接获取的,由于存在GPS、惯性导航系统(inertial navigation system,INS)及相机之间的相对位置(偏心距)及姿态关系(偏心角),系统检校成为其关键,但目前的系统检校方法过分依赖地面检校场,从而会失去机载LiDAR系统和航空数码相机集成的直接获取3维信息的优势[3]。此外,系统检校结果容易受机动性、飞行高度等因素的影响,且检校方程中所包含的误差项相关性较强,因此,经检校纠正后获得的外方位元素通常存在检校的残差。由于机载激光扫描仪同平台的航空数码影像与相同区域激光3维点云数据有相对比较稳定的几何关系,而且多视影像之间又存在几何约束关系,因此,本文中探索利用同平台激光点云数据和多视光学影像的自检校方法以获取影像的高精度外方位元素,不但避免航空摄影测量检校对于地面检校场的过分依赖,而且进一步达到激光点云数据与影像配准的目的。
1 基于激光点云的航空数码影像外方位元素解算
航空数码影像的外方位元素包括3个外方位线元素和3个外方位角元素,前者可以由GPS本身的定位误差、GPS与数码相机之间的同步误差以及偏心距的测量误差、GPS摄站坐标的内插误差等引起;而惯性测量单元的漂移测量误差及其IMU视准轴检校误差等会引起外方位角元素的误差[4]。研究表明,影像外方位角元素误差比线元素误差引起的定位误差要大得多,是引起直接对地目标定位误差的最主要因素[5]。
1.1 基于激光点云的自检校概述
基于激光点云的自检校即以机载LiDAR系统生成的高精度的激光点云作为虚拟的“地面控制点”,进而以摄影测量的方法获取外方位元素。具体流程见下。
(1)利用机载GPS接收机与IMU惯性测量单元,以一定的频率采集GPS以及IMU数据,机载存储单元记录启动快门时所发出的脉冲信号事件时刻;GPS,IMU卡尔曼滤波后处理的结果作为同平台数码相机摄影时刻的外方位元素。
(2)利用步骤(1)得到的影像的原始外方位元素,以激光点云为地面模型基于数字微分纠正的方法生成正射影像,考虑到数码相机的畸变大的特点,在纠正模型中引入了航空数码相机的畸变误差;从而快速建立起了像点与地面3维点云的关系,可以获取“虚拟的地面控制点”。
(3)同一地物点成像在多张影像上,利用多光束交会于空间一点的约束条件,首先构建自检校关系纠正外方位角元素;其次,基于当代数字摄影测量中的多基线空间前方交会的原理解算精确的地物点坐标;最后,以上个步骤得到的地物点坐标为“虚拟地面控制点”,基于摄影测量的空间后方交会原理进一步解算影像的外方位线元素和角元素,达到自检校的目的。
1.2 外方位角元素自检校
激光点云数据为离散的3维地理坐标集,而航空数码影像为连续的光学影像。因此,航空影像的分辨率比激光扫描获得的点云数据高,以任意一个激光3维点为虚拟控制点,基于摄影测量的共线方程,都可以找到与其相对应的影像像点,如下式所示:
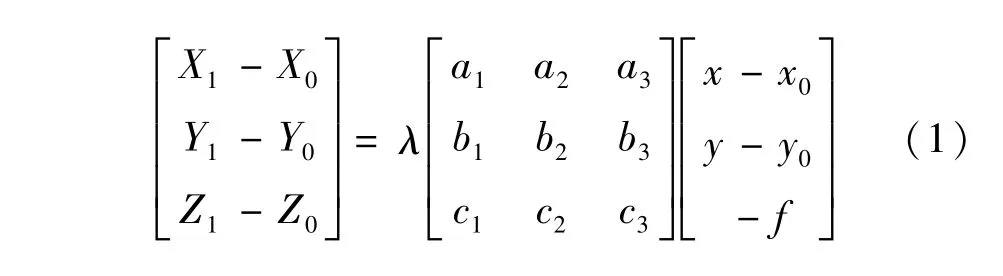
式中,x,y为像点平面坐标;x0,y0,f为影像的内方位元素;X0,Y0,Z0为摄站点的物方空间坐标,即影像的外方位线元素;X1,Y1,Z1为物点的物方空间坐标,λ为比例因子;ai,bi,ci(i=1,2,3)为影像的3个外方位角元素组成的9个方向余弦,如下式所示:
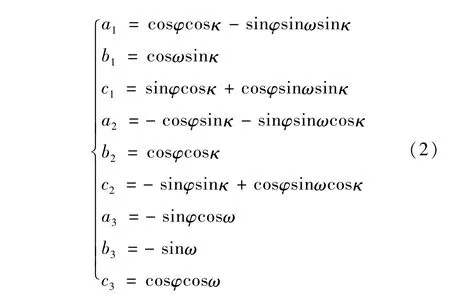
式中,φ,ω,κ为影像的3个外方位角元素;理论上,在没有误差时,同名光线应该交于空中一点。但是,由于相机检校的不完善以及外方位元素的测量误差等因素,同名光线不能完全交于对应的目标点。来自多个影像的同名光线交于对应目标点的位置错误应该小于某一范围。
假定物方有一个水平面,则n条同名射线分别于水平面交于(X1,Y1),(Xi,Yi),…,(Xj,Yj),…,(Xn,Yn),其中i,j=1,2,3,…,n,见下式:

式中,Δx,Δy为水平面上的第i点和第j点的x坐标和y坐标之差。现以第1片、第2片为例推导误差方程。假定外方位元素线元素没有误差,以外方位角元素为未知数,综合(1)式、(2)式线性化并泰勒展开取1次项,求各角元素的偏导数,将非线性方程转化为各角元素改正数的线性方程,得到误差方程见下式:

式中,dφ1,dω1,dκ1,dφ2,dω2,dκ2分别为角元素φ1,ω1,κ1,φ2,ω2,κ2的改正数,各个角元素改正数的系数为其偏导数。如上,列出各片匹配的同名点列立总体误差方程,采用逐点法化的方法,构建法方程求解(φi,ωi,κi),i=1,2,…,n。基于多基线空间前方交会[6]重新计算同名点对的空间坐标,作为虚拟的地面“控制点”。利用这些地面控制点,基于空间后方交会求解外方位元素,即由共线方程(1)式推导如下式所示的误差方程:
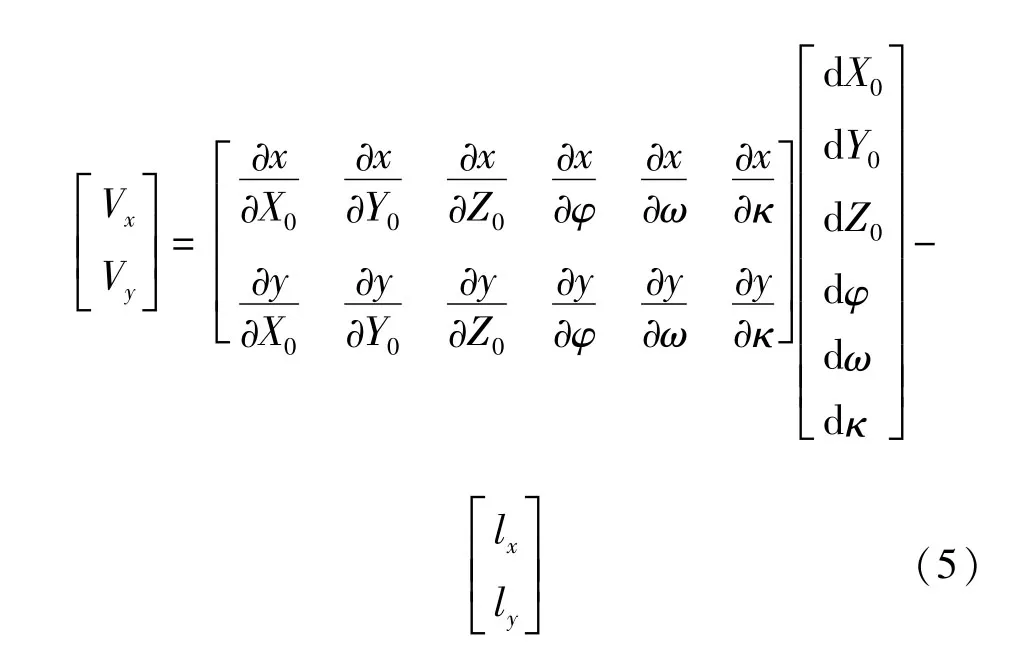
同理,所有同名点对联立总体误差方程写成矩阵的形式为V=BX-L。其中,V为观测值向量的改正数向量,X为外方位元素未知数增量向量,B为系数向量,L为观测向量。最后采用逐点法构建方程求解所有外方位元素(X0i,Y0i,Z0i,φi,ωi,κi),i= 1,2,…,n。
2 实验与分析
以原始的POS数据获取曝光瞬间的外方位元素,以多片空间前方交会[7]获取10个地面检查点3维坐标;以本文中所述的方法,对直接获得的外方位元素进行自检校,自检校后再进行多片空间前方交会,得到相应的地面检查点中误差如表1所示。未经检校的像片外方位元素进行直接对地目标定位的精度较低,且带有如前面所述偏心角等系统误差。而经过自检校后,检查点的精度提高了90%以上。由于仅选取了部分影像进行自检校实验,地面点的3维坐标依然存在一定误差,但实验结果仍能满足我国地形图航空摄影测量业内规范[8]规定的平原地区1∶2000比例尺的精度要求:即平面中误差小于1.2m、高程中误差小于0.5m。如图1所示,为利用自检校技术获取到高精度的外方位元素,以摄影测量的方法生成正射影像并与激光点云配准的结果。实验结果表明,基于影像外方位元素自检校方法能够获取较高精度的同平台影像定位定向,从而实现激光点云与影像的高精度配准。

Table 1 Self-calibration results
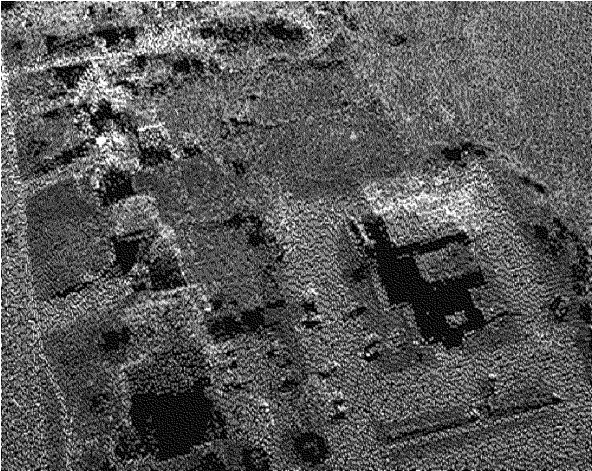
Fig.1 LiDAR point clouds with colorful information
3 结 论
机载LiDAR系统通常携带航空数码相机,机载激光扫描仪获取的激光点云与同平台航空相机获取的影像具有相对比较稳定的几何关系;一个3维点可以成像在多个影像上,多个影像之间也存在稳定的几何约束关系。为此,本文中探索了以激光点云为虚拟控制点,利用多视光学影像的几何约束关系进行影像高精度外方位元素自检校的方法;实验证明该方法达到了获取影像的高精度外方位元素的目的,不但避免航空摄影测量检校对于地面检校场的过分依赖,而且进一步达到了激光点云数据与影像配准的目的。
[1]ZHANG X H.Theory and method of airborne LiDAR measuring technology[M].Wuhan:Wuhan University Press,2007:101-104(in Chinese).
[2]LUO Zh Q,ZHANGH R,WUQ,etal.The airborne LiDAR technology[J].Land and Resources Informatization,2006,21(2):22-25(in Chinese).
[3]IP A,EI-SHEIMY N,MOSTAFA M.Performance analysis of integrated sensor orientation[J].Photogrammetric Engineering&Remote Sensing,2007,73(1):89-97.
[4]ZHONG L,MA H Ch,GUAN H Y,et al.Boresight calibration based fast registration between airborne LiDAR points clouds and synchronous images[J].Geomatics and Information Science of Wuhan University,2011,36(9):1035-1039(in Chinese).
[5]XIE Sh L,DONG X R.Error analysis and accuracy estimation of air-to-ground positioning system based on GPS/INS[J].Bulletin of Surveying and Mapping,2005,32(4):43-51(in Chinese).
[6]ZHANG Z X,ZHANG JQ.Digital photogrammetry[M].Wuhan:Wuhan University Press,2007:87-89(in Chinese).
[7]YUAN X X.POS-supported bundle block adjustment[J].Acta Geodaetica et Cartographica Sinica,2008,37(3):342-348(in Chinese).
[8]STATE BUREAU OF SURVEYING AND MAPPING.GB 7930-87 Specifications for aerial photogrammetric digitalmapping of1∶500,1∶1000,1∶2000 topographic maps[S].Beijing:China Standard Press,1998:8-10(in Chinese).
Self-calibrationofexteriororientationparametersofaerialdigitalimages basedonairborneLiDARpointclouds
CUIHong-xia,SUGuo-zhong,ZHAOXu-hui
(SchoolofInformationScienceandTechnology,BohaiUniversity,Jinzhou121013,China)
Inordertostudyhighpreciseorientationoftheaerialdigitalimages,thegeographicalrelationshipmodel wasderivedwithaerialdigitalimagesandvirtualgroundcontrolpointsfromairborneLiDARpointclouds.Boththeselfcalibrationgeographicalmodelanderrorequationswerebuiltbasedontheprinciplethatallcorrespondingimagerays intersectwithonegroundpointwhichwascapturedonmultiimages.Thehighpreciseorientationdataofaerialimageswas obtainedbysolvingthealgorithmequation.Theresultsshowthattheeffectofself-calibrationofexteriororientation parameterswithoutgroundcontrolpointsisachieved.
imageprocessing;spaceresection;collinearequation;exteriororientationparameters
P231
A
10.7510/jgjs.issn.1001-3806.2013.04.007
1001-3806(2013)04-0445-04
国家中小企业创新基金资助项目(12C26214405323)
崔红霞(1969-),女,博士,现主要从事计算机视觉和摄影测量应用技术的研究。
E-mail:lnchx316@sohu.com
2012-11-07;
2012-12-18
