航天着陆试验场指挥控制系统设计与实现
2013-03-05王晓斌黄伟吕智慧徐弘达
王晓斌黄伟吕智慧徐弘达
(1北京强度环境研究所,北京100076)(2北京空间机电研究所,北京100076)
1 引言
航天产品从预先研究到定型,需要进行大量的各种验证试验。对于航天器着陆验证试验,必须在大型试验场地中进行,并且需要相关测控设备按照一定的试验流程协同工作。
为了保障着陆试验的顺利进行,试验场需要建设指挥控制系统,负责试验过程的通信、指挥调度、监视、控制,通过试验数据监视、现场视频监视、语音调度、指令控制等手段完成对试验过程与状态的综合监控[1]。在试验准备阶段,通过试验仿真,检查各参试设备状态;试验结束后,通过信息回放和数据分析处理,完成试验结果分析评估。
2 系统组成与功能
指挥控制系统由时统子系统、通信子系统、语音调度子系统、视频监视子系统、大屏幕投影显示子系统、数据处理与存储子系统、指令发控台、指显工作站、扬声子系统等设备组成[2]。系统组成结构示意如图1所示。
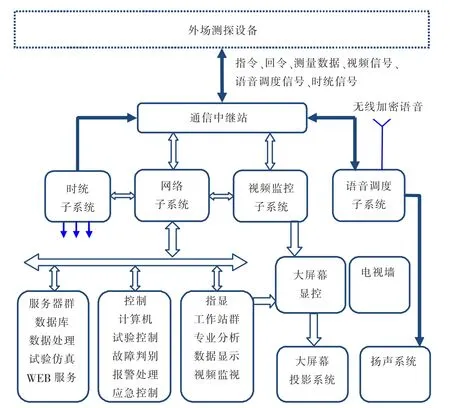
图1 系统组成结构示意图Fig.1 Diagram of composition of the command&control system
为了保证指挥控制系统运行的高可靠性,系统总体结构采用双机双网并行工作模式。作为数据传输核心的网络子系统,结构上采用双网热备路径冗余设计,保证数据传输的高可靠性。作为数据处理与指令发布核心的处理服务器、数据库服务器、磁盘存储阵列设备、控制计算机,设计上都采用双机并行技术,互为备份的设备同时工作,确保试验数据处理与存储、指令发布的安全。双机双网并行工作方式从系统结构上避免了由于单点故障而引起的系统宕机,保证系统的正常运行。
2.1 时统子系统
试验场测控设备必须在统一的时间基准下同步工作,这就需要在试验场建立时间统一系统(时统),为各测控设备提供统一的频率基准和时间基准信号。时间统一系统主要由测频单元、频标单元、时码单元、网络授时单元等部分组成[3]。组成结构示意如图2所示。
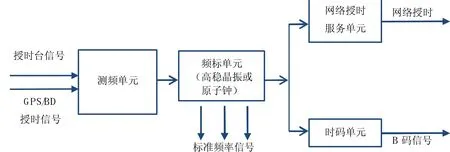
图2 时统子系统组成结构示意图Fig.2 Diagram of composition of time service subsystem
测频单元接收授时台无线电标准频率和时间信号,或者利用全球定位系统 (Global Position System,GPS)/北斗授时接收机进行标准频率与时间测定,以标准频率信号为参考基准,对本地钟进行校准,使本地频标的输出频率与参考基准保持精确同步;同时利用接收的标准时间信号对时码单元进行定时。
频标单元产生并输出标准频率信号,由高稳晶振或原子钟、频标切换部分以及频标放大部分组成。
时码单元为用户设备产生并输出IRIG-B时码信号。
网络授时服务单元通过网络为服务器、计算机、交换机等智能设备提供授时服务。
2.2 通信子系统
通信子系统包括网络子系统和通信中继站,用于完成时统信号传输、语音调度信号传输、视频信号传输、测量数据与控制指令传输。
出于安全考虑,试验区域与指控中心距离较远,因此需要在试验区域设立通信中继站,通过光纤实现外场与指控中心之间的时统、语音和视频信号传输。
通信中继站配备以太网交换机,连接外场测控设备,并通过两路聚合光端口与指控中心的网络子系统连接。
网络子系统承担外场测控设备与指控中心设备之间的数据传输以及指挥控制系统内部的数据传输,配置2套核心交换机、2套外场接入交换机、2套指显接入交换机,构成路径冗余网络[4-5]。网络拓扑结构示意如图3所示。
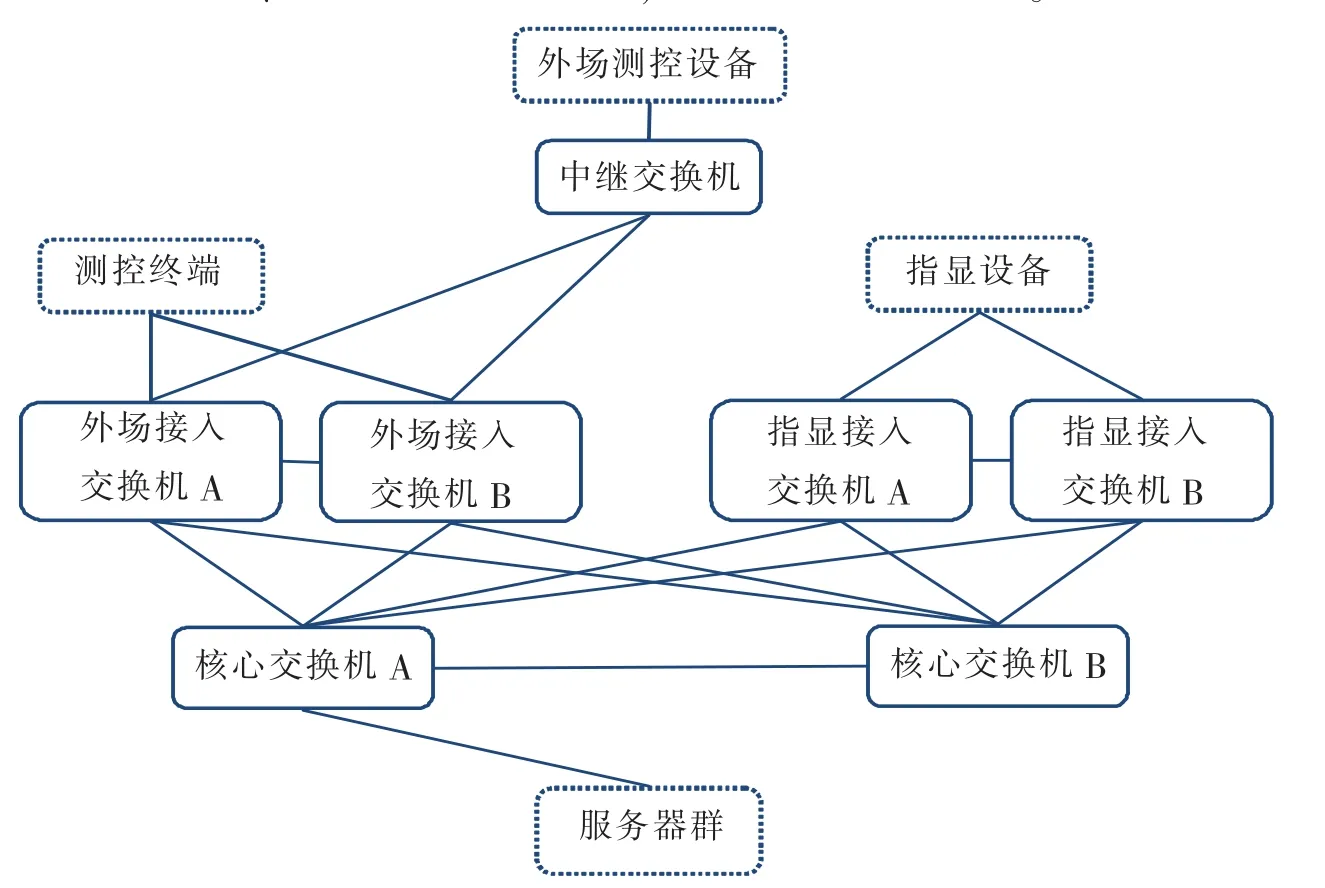
图3 网络拓扑结构示意图Fig.3 Diagram of topology of network subsystem
2.3 语音调度子系统
语音调度子系统完成语音调度、指挥功能。具有通播、广播、分组、单呼、多级调度、监听、录音、回放等功能。语音调度子系统包括调度主机、调度台、有线调度终端、无线基台、无线移动调度终端、话务监控台、录放音设备。
对于试验场固定试验站位,采用有线语音通讯方式,并在集中场合配置公共扬声器,用于广播;对于移动试验站位,采用无线加密通信方式,参试人员配备无线加密移动终端。
2.4 视频监控子系统
试验场一般都划分为不同的区域,完成不同的任务。为了直观地掌握现场情况,需要对各个区域进行视频监控。视频监控子系统主要由视频摄像系统、字幕叠加器、视频分配器、视频录像机、电视墙监视器等设备组成[6]。组成结构示意如图4所示。
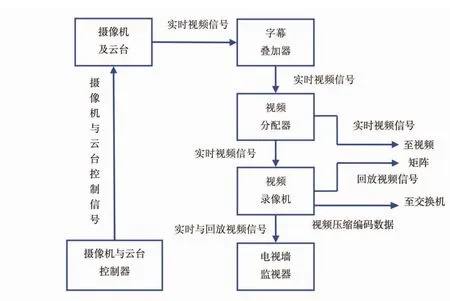
图4 视频监控子系统组成结构示意图Fig.4 Diagram of composition of video monitor subsystem
视频摄像系统包括摄像机、云台、摄像机控制器、云台控制器。摄像机与云台控制器实现对摄像机变焦、角度调整等操作。字幕叠加器对摄像机送来的各路视频信号叠加字幕信息,然后经过视频分配器分路,分别进入视频矩阵和录像机。视频录像机完成视频压缩编码与记录,同时通过监视接口将实时视频信号送至电视墙监视器。在回放过程中,视频录像机将记录的视频信号分别送至电视墙监视器和视频矩阵,也可以通过网际协议(Internet Protocol,IP)形式将记录的压缩编码视频数据发给显示工作站。
2.5 大屏幕投影显示子系统
大屏幕投影显示子系统负责将多路试验视频和计算机显示信号按照要求在大屏幕上投影出来。大屏幕投影显示子系统由视频矩阵、红-绿-蓝(Red-Green-Blue,RGB,一种图像信号传输方式)矩阵、图像处理器、投影机、投影幕组成[6],如图5所示。

图5 大屏幕显示子系统组成结构示意图Fig.5 Diagram of composition of largescreen dispaly subsystem
多路试验视频信号进入视频矩阵,从中选择多路输出至图像处理器;显示工作站、控制计算机等多路视频图形阵列(Video Graphics Array,VGA,一种使用模拟信号的电脑显示标准)显示信号进入RGB矩阵,从中选择多路输出至图像处理器。图像处理器对视频信号和VGA信号进行窗口组合布局,然后经过显示通道边缘融合,分成多路显示信号送至多台投影机进行画面显示。
在指控大厅有足够空间的情况下,可采用背投方式,方便投影机的调试与维护。另外需要关注图像处理器与投影机之间的信号匹配问题,保证投影画面的清晰和还原的真实性。
2.6 数据处理与存储子系统
数据处理与存储子系统接收测控设备发送的测量数据与状态信息,进行解析处理、记录,处理结果发送给指显工作站和指令发控台控制计算机。另外提供试验仿真功能,验证指挥控制系统以及其它设备运行状态的正确性。数据处理与存储子系统设备主要包括处理服务器、数据库服务器、仿真服务器、磁盘阵列、后备磁带库、存储区域网络(Storage Area Network,SAN)交换机。组成示意如图6所示。
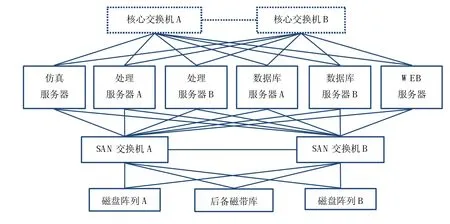
图6 数据处理与存储子系统组成结构示意图Fig.6 Diagram of composition of data process&storagesubsystem
2.7 指令发控台
指令发控台主要设备为2台并行工作的控制计算机,完成试验故障判别、应急控制、试验流程控制与状态监控。
2.8 指显工作站
根据系统规模配备多台指显工作站,各自以双网卡方式与指显接入交换机连接,构成集音视频信息、测量数据于一体的分布式综合显示信息网,供参试人员进行试验数据、视频的监视和判读。
2.9 扬声系统
扬声系统用于指控大厅以及其它场所的会议和语音调度广播,由麦克风、调音台、功放、音箱组成。语音调度子系统的调度语音通过调音台接入扬声系统,以便进行调度广播。
2.10软件系统
指挥控制系统软件包括系统软件、应用软件两部分[7]。层次结构如图7所示。
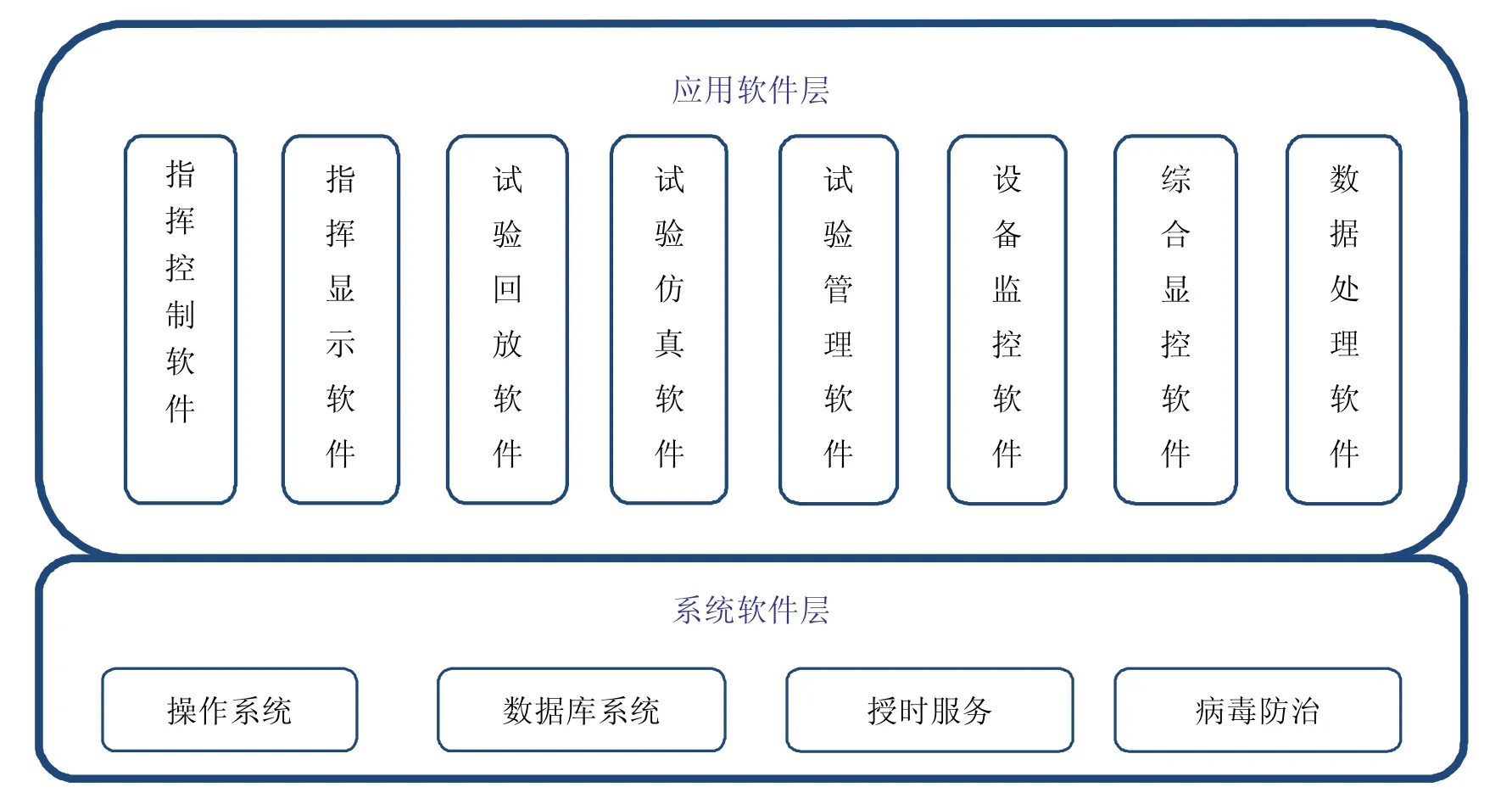
图7 软件层次结构示意图Fig.7 Diagram of hierarchy of software
系统软件包括服务器操作系统、工作站操作系统、数据库系统、网络授时软件、计算机病毒防治软件[8]。
根据功能、性能以及使用要求,将指挥控制系统应用软件分成多个不同类型的独立运行软件,包括指挥控制软件、指挥显示软件、试验回放软件、试验仿真软件、试验管理软件、设备监控软件、综合显控软件、数据处理软件。
指挥控制软件完成试验综合状态监视、任务状态切换、指令控制、故障判别与应急控制、声光报警。
指挥显示软件完成各专业数据、轨迹图形、三维动画、视频图像的实时显示与操作。
试验回放服务软件完成事后对试验过程、试验数据、视频的同步回放。
试验仿真服务软件模拟外场各参试设备测量数据、状态,完成指控中心各设备的状态检查与验证。
试验管理软件完成试验信息配置管理、故障判别专家系统配置管理、试验数据管理。
设备监控软件完成全系统硬件设备的状态监控。
综合显控软件完成时统和气象信息显示、视频信号切换控制、VGA信号切换控制、投影机显示控制。
数据处理软件完成试验数据存储、数据处理、数据分发等功能。
3 系统关键技术途径
3.1 高可靠传输网络设计
在任务期间,传输网络是一个实时通信系统,除了保证参试设备实现互通的基本要求以外,还需要保证参试设备数据流传输的连续性、实时性、及时性。网络的可靠性取决于组网设备本身的可靠性和网络架构的可靠性。如果只单纯提高组网设备的可靠性,是不能解决由单点失效造成的网络瘫痪问题的,因此必须从网络架构[9]设计上着手解决。
网络冗余设计一般采用组网设备冗余和链路冗余,其中设备冗余采用虚拟路由冗余协议(Virtual Router Redundancy Protocol,VRRP)、生成树协议(Spanning Tree Protocol,STP)、快速生成树协议(Rapid Spanning Tree Protocol,RSTP)、 多生成树协议 (Multiple Spanning Tree Protocol,MSTP) 技术,链路冗余采用STP、RSTP、MSTP、链路聚合控制协议(Link Aggregation Control Protocol,LACP)技术。
VRRP是一种容错协议,它可以实现2个核心交换机在第3层的热备份功能,保证当某1台交换机出现故障时另1台可以取而代之,从而保持通信的连续性和可靠性。
STP/RSTP/MSTP生成“树协议”,主要用来建立维护网络拓扑,通过有选择性地阻塞网络冗余链路来达到消除网络二层环路目的,消除循环链接导致的网络广播风暴,同时具备链路备份能力,提供网络拓扑的冗余备份功能。
LACP技术用来解决2台交换机间的带宽问题,将多条链路绑在一起作为一个逻辑链路使用,在客观上也起到了链路备份的作用。
在指挥控制系统中,采用星型千兆以太网,分为核心层、接入层2层结构,接入层和核心层皆采用组网设备冗余和链路冗余设计。
核心层和接入层各自采用2套互为热备的3层千兆交换机,每套接入交换机通过双回归聚合链路与2套核心交换机连接;外场测控设备分别通过2条路径与2套外场接入交换机连接;指显设备分别通过2条路径与2套指显接入交换机连接;指控中心服务器群中的各设备分别通过2条路径与2套核心交换机连接。由此形成网络冗余配置模式,消除了由于网络单点故障造成的通信中断隐患,确保数据传输的高可靠性。
另外,试验场测控设备种类较多,并且各类设备往往自成系统以完成专业化测控任务。各系统内部需要传输大量信息,为避免不同系统间信息的串扰和网络广播风暴,需要为各系统划分不同的虚拟子网(Virtual LAN,VLAN),在链路层隔离不同系统的信息。同时为了解决不同系统间的信息交互,又需要在传输层通过IP进行信息交换。通过在核心层与接入层合理划分VLAN以及IP交换配置,能够有效避免广播风暴和网络阻塞,确保数据与指令传输的实时性、准确性和安全性。
3.2 服务器冗余设计
在试验过程中,必须保证试验数据的连续实时处理和可靠记录。因此,为避免单点故障,数据处理服务器、数据库服务器、磁盘阵列设备都各自部署2套设备,形成双机系统[10]。
双机系统典型应用包括主从、互备、并行等模式。
1)主备模式
是最标准、最简单的双机热备方式。它使用2台服务器,1台为主机,另1台为备机。当主机工作时,备机处于待机状态。当主机出现故障时,通过软件诊测(一般是通过心跳诊断)将备机激活,保证应用在短时间内恢复正常使用。
2)双机互备模式
是在主备模式的基础上,2台服务器同时运行不同的应用程序,并且彼此均设为对方的备机。当某1台出现故障时,另1台可以在短时间内将故障机的应用接管过来,从而保证应用的持续性。
3)双机并行模式
2台服务器同时运行相同的应用程序,同时接收数据,进行相同的处理。
主备和互备模式都存在故障诊断与切换时间延迟。在此期间,会造成数据处理的间断,并且有可能造成试验数据丢失。试验数据是宝贵的资源,任何数据片段的丢失都可能造成极大的损失。因此,本系统采用双机并行工作模式,并且各设备都以冗余路径进行数据传输,以保证数据处理与存储的高可靠性。同时配备后备磁带库设备,用于异地保存试验数据,最大程度保护数据安全。
3.3 网络传输实时性与安全性设计
指挥控制系统软件通过以下几点来保障实时性和安全性:
1)对于实时性要求高和客户端数量多的软件,采用客户端/服务器(Client/Server,C/S)软件架构进行设计,以满足软件实时性要求;其它软件采用浏览器/服务器(Browse/Server,B/S)软件架构,以保证软件使用与维护的简便性。
2)采用多线程设计技术,利用不同优先级的线程完成实时性要求不同的任务,为高速处理线程分配高优先级,指令控制线程具备最高处理优先级,保证所有任务都能够在规定时间内得到处理。
3)指挥控制系统同时存在点对点、点对多点的网络传输方式。在点对点方式中,控制指令采用具有安全保障的传输控制协议(Transmission Control Protocol,TCP)方式进行传输,数据采用高效率的用户数据报协议(User Datagram Protocol,UDP)方式进行传输。在点对多点方式中,采用UDP组播协议进行传输,发送端只需发送一份信息,多个接收端同时接收,保证信息接收的同步性和实时性,同时又极大减轻发送端负荷。
4 结束语
试验场指挥控制系统是一个综合性系统。本系统已经在航天某着陆试验场中得到了成功应用,历经多次专项工程试验,圆满完成了“悬停”、“避障”、“缓速下降”等试验中的指挥与调度、视频监控、数据分析与处理、试验故障判别、试验控制、通信等任务。
(References)
[1] 毛庆华.航天试验靶场试验指挥与信息综合管理系统的研究[C].第6届全国青年管理科学与系统科学学术会议论文集,大连,2001:348-354.MAOQinghua.Research on Test Command and Generation Information Management System of Space-flight Trial Launching Site[C].The Papers of Academic Conference of the Sixth National Youth Administrative Science and Systematic Science,Dalian,2001:348-354.(in Chinese)
[2] 高媛,赵新国.航天试验指挥自动化系统体系结构[J].火力与指挥控制,2003,28(6):18-20.GAO Yuan,ZHAOXinguo.StudiesontheArchitectureof Command Automation Systemof AerospaceExperiments[J].FireControl&Command Control,2003,28(6):18-20.(in Chinese)
[3] 杨晓斌.航天测控监控显示系统的发展及设计[J].飞行器测控学报,1999,18(1):20-24.YANB Xiaobin.The Development and Design of Aerospace TT&CMonitor System[J].Journal of Spacecraft TT&CTechnology,1999,18(1):20-24.(in Chinese)
[4] 马红皎,胡永辉.GPS&IRIG-B码时间系统分析[J].电子科技,2005(7):21-25.MA Hongjiao,HUYonghui.Analysisof theGPS&IRIG-BCodeTimeSystem[J].Electronic Scienceand Technology,2005(7):21-25.(in Chinese)
[5] 李琳.局域网技术与应用[M].北京:清华大学出版社,2004:205.LILin.The Technology and Application of Local Area Network[M].Beijing:Tsinghua University Press,2004:205.(in Chinese)
[6] 张三洪.企业千兆以太网组网方案与实施[J].电力系统自动化,2001,25(13):50-53.ZHANGSanhong.Design and Implementation of Gigabit Ethernet Network in Enterprise[J].Automation of Electric Power Systems,2001,25(13):50-53.(in Chinese)
[7] 徐甲同,李学干.并行处理技术[M].西安:西安电子科技大学出版社.2001.XU Jiatong,LIXuegan.Parallel Process Technology[M].Xian:XIDIAN University Press,2001.(in Chinese)
[8] 张友生.软件体系结构原理、方法与实践[M].北京:清华大学出版社,2009.ZHANGYousheng.Theprinciple,Method and Practice of Software System[M].Beijing:Tsinghua University Press,2009.(in Chinese)
[9] Robert B.Switched,Fast,and Gigabit Ethernet[M].New York:Ziff-Davis Press,1996.
[10] 刘竹林.数据库设计与Oracle数据库应用教程[M].北京:清华大学出版社,2009.LIU Zhulin.The Design of Database and the Application Course of Oracle[M].Beijing:Tsinghua University Press,2009.(in Chinese)