气囊式无人机缓冲系统的着陆侧翻现象
2013-03-05吕航何欢陈国平
吕航 何欢 陈国平
(南京航空航天大学机械结构力学及控制国家重点实验室,南京210016)
1 引言
缓冲气囊以其较轻的质量,良好的折叠性能、低廉的成本等独特优势[1],为高价值返回器的软着陆或回收提供了一种有效的缓冲技术,成为航天航空空投与软着陆技术领域一个极富应用前景的热点研究方向。不同构型的缓冲气囊在不同的领域中起到了良好的缓冲保护作用[2-3]。
无人机着陆缓冲气囊是一种用非弹性的、柔性的、不透气的材料制成的可充气的囊体系统。当无人机着陆时,气囊在冲击载荷作用下被压缩产生变形,吸收无人机冲击能量,然后通过排气装置排出囊内气体,及时释放所吸收的能量,从而达到缓冲无人机冲击过载、保护无人机回收安全的目的[4]。
缓冲气囊在着陆时,与地面有相当大的反作用力,接触面积和受压缩的行程大,因而缓冲的加速度峰值小,缓冲效果明显;它一旦启动,其展开、缓冲过程自动完成,可靠性高。但是,着陆缓冲气囊主要缺点在于展开后,与无人机形成的组合体高度高、质心位置高,稳定性差;对地面风和地面坡度的影响敏感,在着陆时容易发生反弹、倾倒,乃至翻滚[5]。
针对某些特殊的着陆环境,采用气囊系统作为缓冲装置是非常有效的。然而,气囊缓冲系统的一个缺点是难以控制着陆状态下存在侧向速度时引起的无人机的侧翻现象。
随着计算机仿真技术的高速发展,研究人员越来越多采用了数值模拟技术进行设计,该方法能够提高试验质量,减少试验次数,甚至使部分试验工作能够被仿真模拟取代,从而大大降低昂贵的试验成本[6],而且通过仿真可以很好的优化气囊结果的设计参数,工程设计和理论分析中主要关注的缓冲气囊参数,如气囊体积、气囊高度、触地面积、着陆速度、初始内压、爆破气压、排气口面积等直接影响缓冲特性的参数都可以通过仿真计算进行优化调整。
本文以无人机为研究对象,通过仿真分析手段研究无人机在典型着陆环境下的动力学行为。为改善着陆过程中的侧翻问题,引入翼尖触地速度为评价指标,分析了着陆侧向速度对侧翻过程的影响,并以仿真分析结果为依据,提出了减缓侧翻现象的途径。
2 动力学模型
某无人机的缓冲气囊模型如图1所示,图(a)为缓冲气囊几何模型,该模型为梯形台结构,气囊高450mm,上底面长700mm,宽410mm,下底面长1 300mm,宽450mm,气囊两侧各有1个直径为75mm的排气口。在Dytran中划分气囊单元,图(b)为气囊的有限元模型。

图1 某无人机着陆缓冲气囊模型Fig.1 Model of cushion airbag of atypeof UAV
缓冲系统动力学模型包括无人机模型、气囊模型和地面模型。无人机着陆缓冲气囊系统的动力学模型如图2所示,无人机底部安装2个梯型台形状的缓冲气囊。气囊下底面距离地面的高度为888mm。

图2 无人机着陆缓冲气囊系统动力学模型Fig.2 Dynamicsmodel of airbag cushion system for the UAV
考虑到飞行器总体着陆缓冲性能指标分析的需要,将无人机和着陆面定义为刚性体。气囊织物采用线弹性模型,材料密度ρ=875kg/m3,弹性模量E=6.43GPa,泊松比µ= 0.3,厚度δ=1.07 mm。无人机的属性如表1所示,表中Ix,Iy,Iz分 别为无人机绕着X,Y,Z轴的转动惯量;坐标原点在无人机模型的机头顶点处。

表1 无人机属性Tab.1 Property of the UAV
3 着陆缓冲过程仿真
3.1 各工况的仿真计算
气囊初始压力为105kPa,气囊排气口爆破膜的爆破压力设计为117.091kPa,外部环境压力为101.325kPa。
考虑无人机以垂直地面速度8m/s着陆,并带有水平横向速度。缓冲着陆计算中,考虑不同水平横向速度的影响,制定了如表2所示的分析状态。

表2 无人机着陆缓冲分析状态Tab.2 Analysis conditions of impact process for the UAV
分别计算无人机在各个工况下的缓冲效果,以垂直方向速度为8m/s,水平横向速度为8m/s的着陆状态为例,气囊着陆缓冲系统的着陆缓冲时间历程如图3所示。
缓冲仿真中,无人机以预定方向和速度着陆,在这个过程中,气囊由初始设置气压平衡至预定充气气压105kPa。当无人机压缩气囊使气囊内气压达到爆破压力117.091kPa时,气囊开始排气。以第7种着陆工况为例,在计算时间达到183.7ms时,无人机右侧机翼触地,之后立即发生反弹。按照对无人机典型着陆各工况的仿真实验,无人机会出现数次反弹撞地。
工况7中的无人机质心垂直方向过载曲线、速度曲线、气囊的压力和体积变化曲线分别如下:
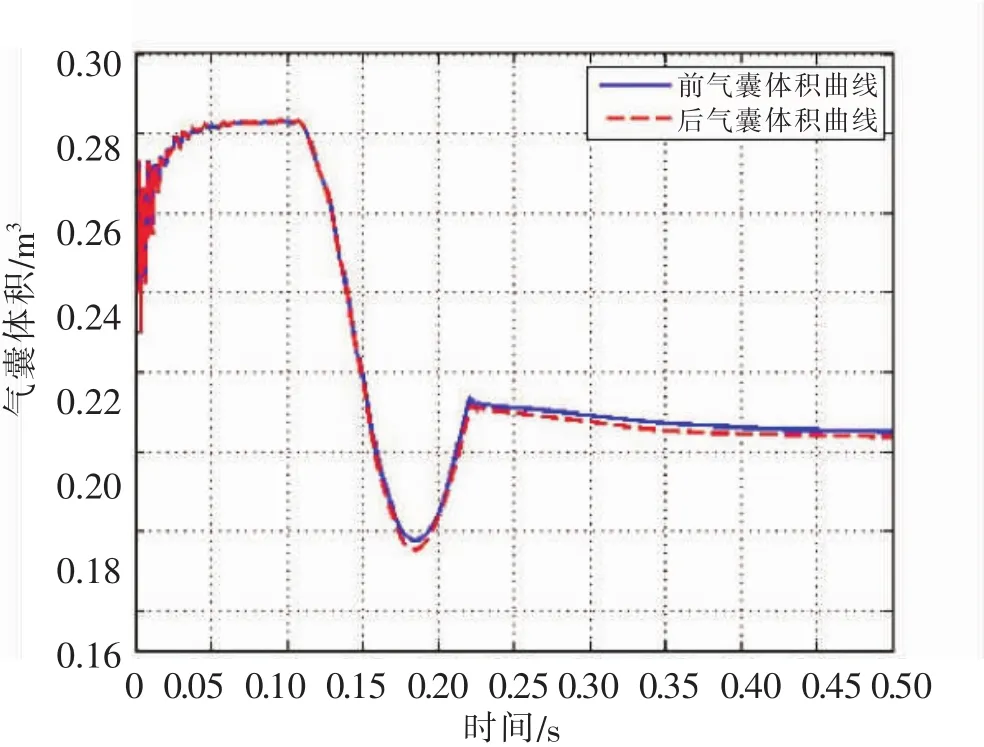
图7 前后气囊的体积变化曲线Fig.7 Volume curvesof fore airbag and aft airbag
由工况7的仿真垂直方向过载曲线可以看出,未触地前无人机的最大过载值为21.7gn。在183.7ms时机翼触地,无人机过载急剧增大,质心速度也迅速逆转,由于仿真实验中将无人机和地面均当做刚体处理,使得机翼触地后无人机立即反弹;实际中无人机回收时机翼触地可能产生无人机破损或者侧翻。前后气囊压力和体积也都在翼尖触地后达到峰值,之后回复到与环境大气相平衡的状态。
3.2 触地参数与横向速度的关系
无人机在缓冲着陆时,由于侧向速度引起的地面摩擦导致地面给气囊底面施加横向的外力,再加上缓冲气囊和无人机本身的高度,就形成了使无人机发生滚转的力矩,很容易导致机翼触地或者机身翻倒。为了使无人机缓冲着陆的侧翻现象具有可研究性,本文引入了当无人机发生触地时的机翼翼尖的垂直速度和机身质心角速度作为评估标准,量化的来探讨侧翻与横向速度的关系。
按照缓冲着陆的不同状态分别计算无人机的缓冲过程,可以得到在触地时无人机的翼尖速度和质心角速度,如表3所示。图8、图9表示它们与横向速度的关系曲线。

表3 各工况触地参数Tab.3 Parameters in different touchdown conditions

图8 翼尖触地速度与横向速度关系曲线Fig.8 Relationship between wingtip touchdown velocity and lateral velocity

图9 质心角速度与横向速度的关系曲线Fig.9 Relationship between UAV mass-center angular velocity and lateral velocity
由仿真结果可以看出,无人机在横向速度为0m/s,1m/s的工况下没有触地现象,在其它工况下均发生触地,随着横向速度从2m/s增加到8m/s,翼尖速度从3.97m/s增大到9.96m/s,质心角速度从10.74rad/s增大到16.04rad/s,负号表示方向向下,由此可见,无人机在较小的横向速度下具有稳定性,不会发生触地,在无人机的横向速度增加的条件下,触地时翼尖的垂直速度和质心角速度均增大,无人机发生侧翻和破损的可能性增加。
4 侧翻原因探讨
某采用气囊缓冲着陆系统的无人机在回收过程中会发生侧翻现象,这也即是本文的研究问题。从缓冲着陆仿真实验可以看出,无人机在垂直方向速度8m/s,横向速度为8m/s,6m/s,4m/s,3m/s,2m/s的时候均发生机翼触地,而在横向速度1m/s和0m/s的时候无人机没有触地现象。而且,随着横向速度的增加,无人机的触地翼尖速度和质心角速度增大,发生侧翻的可能性变大。因此,在实际使用中,在相同垂直着陆速度的情况下,应该尽量减小无人机的横向速度。
由于仿真实验中将无人机和地面均作为刚体处理,因此在触地发生时,无人机会发生反弹跳起。实际操作中,无人机的机翼一旦发生触地,很可能引起机翼损坏,极大的增加了无人机着陆的过载,在横向冲击强度足够大时,就会发生侧翻。因此,解决着陆侧翻问题的一个充分条件就是减少无人机触地的可能性。
假设有这样一个长方体模型,正以垂直速度和水平横向速度着地,那么在接触地面之后,模型受到与水平速度相反的地面摩擦力f1,如果模型受到地面的支持力为N,摩擦因数为µ0,则模型在地面滑行时所受到的摩擦力为f1=µ0N,方向相反于水平速度;如果在模型着陆时,使其具有纵向速度,那么在纵向就会产生摩擦力f2,与横向摩擦力f1共同构成µ0N,在µ0N不变的情况下,因为f2的产生,f1就会减小,如图10所示。设摩擦角θ为纵向速度与合速度的夹角,d为模型质心到地面的距离,则模型所受到的摩擦力及滚转力矩为:
横向摩擦力f1=µ0N× sinθ
纵向摩擦力f2=µ0N× cosθ
滚转力矩M=f1×d
式中 滚转力矩M即是可能引起模型发生翻滚的外力,M值由f1与d的积决定。
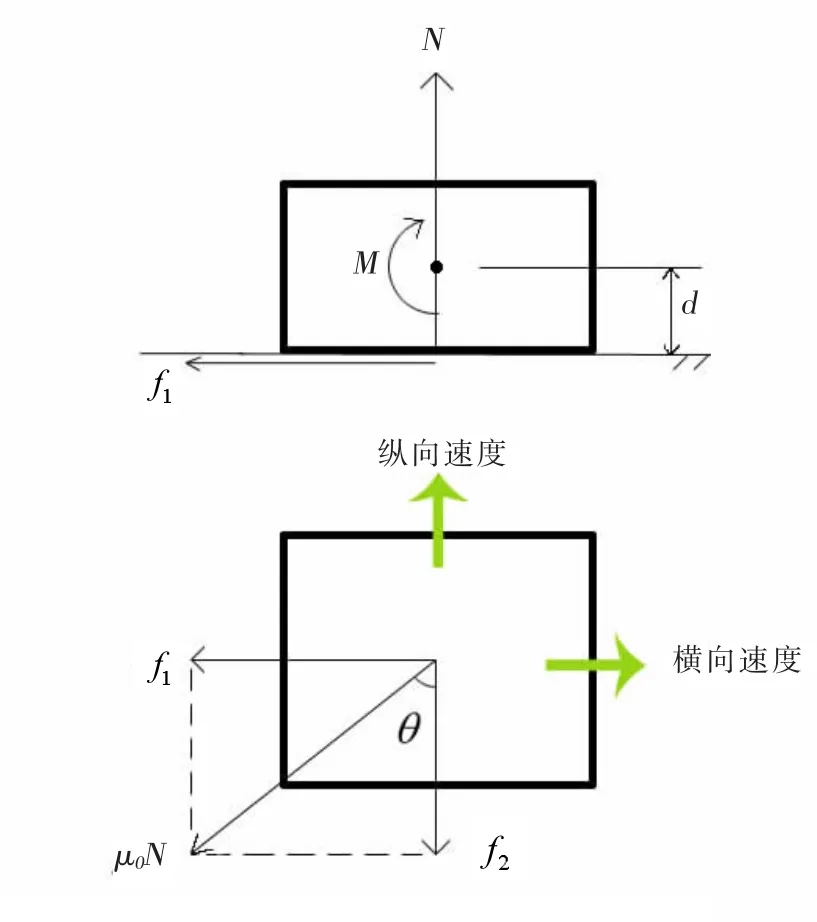
图10 模型在地面所受的摩擦力Fig.10Frictionforcefromtheground ofcuboid model

图11 无人机着陆所受到的滚转力矩和摩擦角 Fig.11Turn-overmomentand frictionangleinlandingprocessof theUAV
对于缓冲着陆中的无人机来说,它所受到的滚转力矩如图11所示,地面摩擦力f=(mgn+ma),其中m gn为无人机重力,ma为垂直方向过载力,为气囊与地面的摩擦因数;如果无人机质心到地面的距离为D,那么它所受到的横向摩擦力为fUAV=f×s inθ,翻滚力矩为MUAV=fUAV×D。
同样,以垂直方向速度8m/s,水平横向速度为8m/s为例,分别对无人机水平纵向速度为0 m/s、4 m/s、8 m/s、11 m/s、14 m/s、17m/s、20 m/s几种着陆状态进行模拟,计算得到触地翼尖速度和质心角速度随纵向着陆速度变化的关系分别如图12、图13所示。
可以看出,在上述着陆状态下,只有当着陆纵向速度超过8m/s以后,翼尖触地速度开始随纵向速度的增加而降低。对比图7可以归纳出,当纵向速度与合速度之间的夹角小于45°的情况时,翼尖触地速度会随夹角的减小而降低。
当纵向速度为20m/s时,其翼尖触地速度为1.96m/s,质心角速度为6.89rad/s。其翼尖速度和质心角速度甚至小于先前的横向速度2m/s工况的参数,如图14所示。

图12 翼尖触地速度与纵向速度的关系曲线Fig.12 Relationship between wingtip touchdown velocity and longitudinal velocity

图13 质心角速度与纵向速度的关系曲线Fig.13 Relationship between UAV mass-center angular velocity and longitudinal velocity
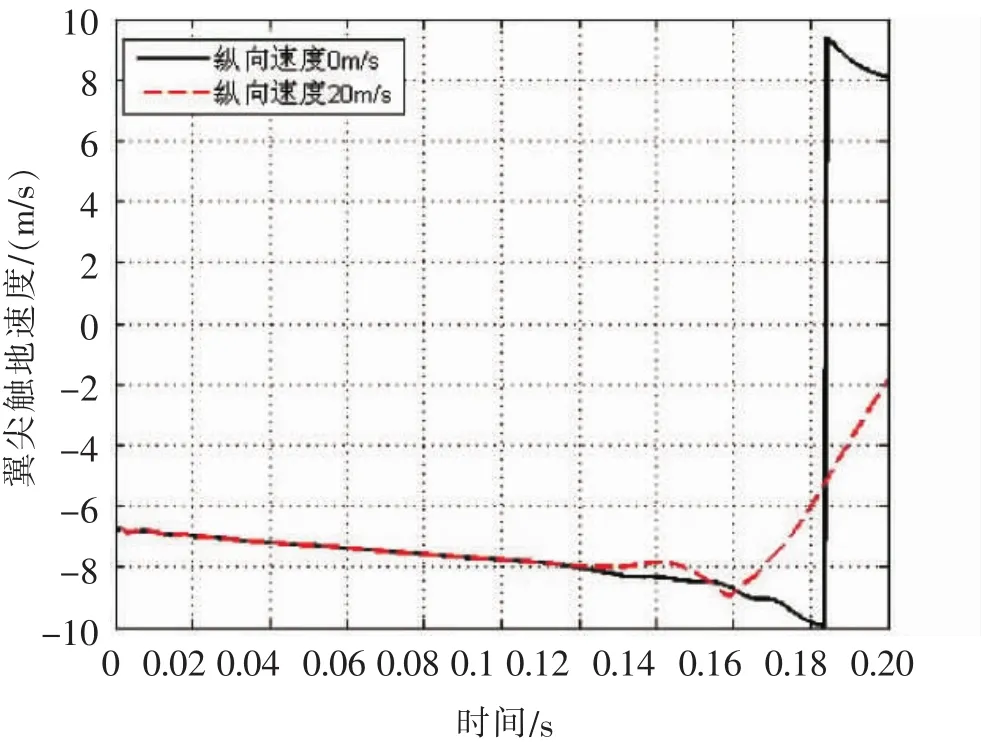
图14 纵向速度为0m/s和20m/s时的翼尖触地速度时域曲线Fig.14 Wingtip touchdown velocity curves in time domain with 0m/s and 20m/slongitudinal velocity
对比纵向速度20m/s和没有纵向速度两种状态的翼尖触地速度可以发现,20m/s纵向速度的工况下,触地时翼尖速度降低了80.3%,而且发生翼尖触地时刻从183.7ms延迟到199.8 ms。
5 结束语
本文计算结果表明,横向速度对某无人机着陆侧翻的影响非常显著,在给定垂直着陆速度和纵向水平速度条件下,横向水平着陆速度越大,侧翻的情况越严重。在垂直着陆速度为8m/s的时候,当横向着陆速度降低到1m/s以下时,该无人机不会发生触地现象。
分析结果表明,着陆侧翻与无人机着陆过程中的摩擦力作用在无人机系统上的滚转力矩有密切联系。在着陆过程中,滚转力矩由摩擦力的侧向分量及摩擦力距离机身质心的高度决定。因此,为减缓或防止无人机产生着陆侧翻,应重点考虑如何减少着陆过程中的摩擦角,并控制气囊充分压缩状态下无人机质心的高度。
在实际着陆状态中,减少摩擦角的方式可以有两种,一是尽可能将横向水平着陆速度降低,二是适当增大纵向水平着陆速度。
控制气囊充分压缩状态下的无人机质心高度的方式必须考虑更改气囊几何尺寸,降低充气囊体的初始高度,并尽可能使气囊高度接近气囊有效行程。
此外,无人机着陆过程中的反弹问题也需要多方面考虑,因为它关系到气囊是否有效的起到了缓冲作用,改善排气装置,或使用具有可控排气口的装置可能是提高气囊着陆缓冲性能的有效方式。
(References)
[1] 戴华杰,胡振东,咸奎成,等.火星探测器气囊缓冲系统着陆过程仿真[J].力学季刊,2010,31(4):555-561.DAI Huajie,HU Zhendong,XIAN Kuicheng,et al.Simulation Analysis for Landing Process of a Mars Detector with Airbag Buffer System[J].Chinese Quarterly of Mechanics,2010,31(4):555-561.(in Chinese)
[2] 温金鹏,李斌,杨智春.缓冲气囊冲击减缓研究进展[J].宇航学报,2010,31(11):2438-2445.WEN Jinpeng,LIBin,YANG Zhichun.Progress of Study on Impact Attenuation Capability of Airbag Cushion System[J].Journal of Astronautics,2010,31(11):2438-2445.(in Chinese)
[3] 黄刚,李良春,林健.着陆气囊的缓冲机理与技术分析[J].装备环境工程,2011,8(4):86-89.HUANG Gang,LI Liangchun,LIN Jian.Analysis of Cushion Mechanism and Technology of Landing Airbag[J].Equipment Environmental Engineering,2011,8(4):86-89.(in Chinese)
[4] 张元明.无人机回收减震气囊的理论研究[J].液压与气动,2005(1):7-9.ZHANG Yuanming.Study of Air Bag Impact Attenuation System for UAV[J].Chinese Hydraulics&Pneumatics,2005(1):7-9.(in Chinese)
[5] 林华宝.着陆缓冲技术综述[J].航天返回与遥感.1996,17(3):1-16.LIN Huabao.Landing Impact Attenuation Technologies Review[J].Spacecraft Recovery and Remote Sensing,1996,17(3):1-16.(in Chinese)
[6] 尹汉锋,文桂林,韩旭.空投设备缓冲气囊的优化设计[J].系统仿真学报,2008,20(5):1325-1327.YIN Hanfeng,WEN Guilin,HAN Xu.Optimal Design of Airbag Impact Attenuation System for Airdropping Equipment[J].Journal of System Simulation,2008,20(5):1325-1327.(in Chinese)
[7] 邓春燕,裴锦华.全向式气囊着陆装置缓冲过程的仿真研究[J].南京航空航天大学学报,2009,41:97-102.DENG Chunyan,PEI Jinhua.Modeling and Process Simulating about Folding and Inflating of Omni-Directional-type Airbag[J].Journal of Nanjing University of Aeronautics&Astronautics,2009,41:97-102.(in Chinese)
[8] 马常亮,何欢,陈国平.气囊着陆缓冲系统的排气孔面积优化[J].航天返回与遥感,2009,30(4):6-10.MA Changliang,HEHuan,CHENGuoping.The Optimization of Venting Areaof Airbag Landing System[J].Spacecraft Recovery and Remote Sensing,2009,30(4):6-10.(in Chinese)
[9] Richard B T,Robin CH,Cliff EW,et al.Modeling and Simulation of the Second-generation Orion Crew Module Air Bag Landing System[C].AIAA SPACE 2009 Conference&Exposition,2009.
[10] Allouis E,Ellery A,Welch C S.Entry Descent and Landing Systems for Small Planetary Missions:Parametric Comparison of Parachutesand Inflatable Systemsfor the Proposed Vanguard Mars Mission[J].Acta Astronautica,2006,59:911-922.