基于三维激光扫描技术的建筑物轮廓拟合精度研究
2013-03-03孔祥玲欧斌
孔祥玲,欧斌
(重庆市勘测院,重庆 400020)
基于三维激光扫描技术的建筑物轮廓拟合精度研究
孔祥玲∗,欧斌
(重庆市勘测院,重庆 400020)
三维激光扫描技术可以高精度、海量、快速地获取被测对象的三维坐标,构建出被测对象精准的三维立体模型,这种高精度的三维立体模型在各个行业有着广泛的用途。然而轮廓线提取精度是三维立体模型制作精度中起决定性因素之一。本文采用RIEGL VZ-1000三维激光扫描仪,对重庆人民大厦进行了扫描,研究了建筑物扫描点云间隔设置和轮廓线拟合提取方法。
三维激光扫描技术;空间分辨率;点云数据;扫描
1 引 言
随着激光技术、计算机技术、微电子技术、半导体以及传感器等技术的发展和应用需求的推动,激光测量技术逐步由点对点的激光测距装置,发展到采用非接触主动测量方式,快速获取物体表面大量采样点三维空间坐标的三维激光扫描测量技术。与其他非接触式测量方法相比,该技术具有较大的偏置距离和测量范围,对某一区域扫描时,采集点位密度大,数据信息丰富,可以真实反映现实环境;测量准确度高,特别适合测量表面复杂的物体及其细节的测量,实现目标的精细化测量;测量速度快,节约大量的时间,使工作效率提高,劳动强度降低,投入费用也有减少;抗干扰性好,在昏暗的条件下或者夜间都不影响测量。
三维激光扫描技术可以高精度、海量、快速地获取被测对象的三维坐标,构建出被测对象精准的三维立体模型。在三维激光扫描仪的精度评价中,其扫描数据的三维立体建模精度是反映仪器测量精度的重要指标之一,为了解三维激光扫描建筑物轮廓的提取精度,本文采用RIEGL VZ-1000三维激光扫描仪,对重庆市人民大厦相邻两个墙面作为研究对象进行了扫描,研究了建筑物轮廓扫描云间隔设置和轮廓线拟合方法。
2 三维激光扫描仪选用
本次研究需要扫描距离长、精度高、速度快且扫描点云均匀的扫描仪。奥地利RIEGL公司推出RIEGL VZ-1000三维激光扫描仪,其采用了脉冲法测距方式,拥有RIEGL独一无二的全波形回波技术(waveform digitization)和实时全波形数字化处理和分析技术(online waveform analysis),每秒可发射高达300,000点的纤细激光束,提供高达0.0005°(1.8″)的角分辨率,扫描距离可达1 km。除此以外,基于RIGEL独特的多棱镜快速旋转扫描技术,它能够产生完全线性、均匀分布、单一方向的扫描激光点云线。因此本采用RIEGL VZ-1000三维激光扫描仪进行试验。
3 场地选择及常规测量方案
选择便于设置点位和观测要求的人民大厦相邻两个墙面作为研究对象,如图1所示。

图1 人民大厦相邻两个墙面
在人民大厦前方布设5个基准点,作为观测控制网,采用TCA2003全站仪(0.5″,1+1PPm)按四等精度要求对控制网进行测量,运用清华山维Nasew平差软件对测量数据进行平差,计算出控制网的坐标,控制网如图2所示。
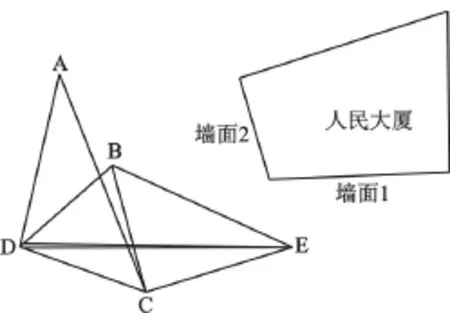
图2 控制网布设示意图
根据研究的要求,分别在人民大厦相邻墙面上布设了特征点,在墙面2上布设Z1、Z2、Z3、Z4、Z5、Z6,在两个墙面的交界处布设Y1、Y2、Y3、Y4、Y5、Y6。使用TCA2003全站仪,分别在B点和C点设站,采用前方交会方法测量特征点的点位坐标,作为三维激光扫描获取轮廓线的比较数据。特征点点位布设如图3所示。

图3 人民大厦墙面特征点布设示意图
4 三维激光扫描外业数据采集
对人民大厦两个墙面采用RIEGL VZ-1000三维激光扫描仪进行扫描。分别在B、C、D和E点上架设激光扫描仪,对其进行严格的对中整平,为了提高各站点云数据拼接精度,每次在测站点设站时其余各点上均架设后视标靶,每站对墙面和后视标靶进行扫描。在B点只扫描墙面2,在E点只扫描墙面1,在C点同时对墙面1和墙面2进行扫描,在D点采用两种不同空间分辨率参数设置扫描墙面1和墙面2及其轮廓交线。在扫描过程中实时监控扫描数据情况,保证获得较好的扫描数据。在扫描结束后对获取的数据进行检查,保证数据的完整性。
5 数据处理与分析
5.1 数据处理
内业处理按照点云数据滤波、点云数据平滑处理、点云数据的分割、不同测站扫描数据的拼接和融合等环节进行。其中难点是对点云数据的厚度处理,根据三维激光扫描仪得到的点云包含四维信息,即三维坐标和回光信号强度,在数据处理中首先剔除回光信号强度相对较弱的点,采用信号强度较强点云进行后期处理。
具体处理时,将在B点和E点设站扫描获取的墙面点云数据进行最终拼接、拟合并提取墙面相交处轮廓线;对在C点设站扫描获取的点云数据,按常规方法处理后提取墙面相交处轮廓线;对D点按两种不同空间分辨率获取的墙面点云数据分开处理后,提取各特征点的坐标。
5.2 空间分辨率设置对建模精度的影响
扫描的空间分辨率指扫描点的采样间隔,反映了对被测物体扫描的精细程度。对每一个目标的扫描,都需要事先设置扫描分辨率。在对被测物体进行扫描之前,要依据激光束发散角的大小及距离的远近设置激光扫描仪的分辨率。图4中表明不同分辨率所获得扫描数据的情况。
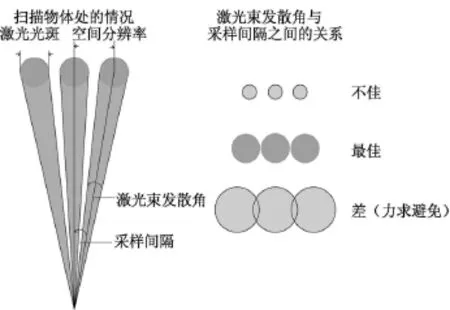
图4 激光束发散角与采样间隔之间的关系
为验证不同扫描间隔对点云数据建模精度的影响,在D点设站对人民大厦进行扫描时,利用RIEGL VZ-1000三维激光扫描仪具有的点云间隔设置功能,分别选用了100 m距离10 mm和2 mm两种点云间隔进行扫描,扫描得到的点云数据经处理后的效果如图5和图6所示。

图5 点云间隔10 mm的扫描数据
图6 点云间隔2 mm的扫描数据
对两种不同点云间隔扫描数据建立表面模型,拟合墙面上特征点Z1~Z6的坐标,并与TCA2003全站仪测量相对应点的坐标进行距离量取,得到不同点云间隔设置下的模型精度,其结果如表1所示。
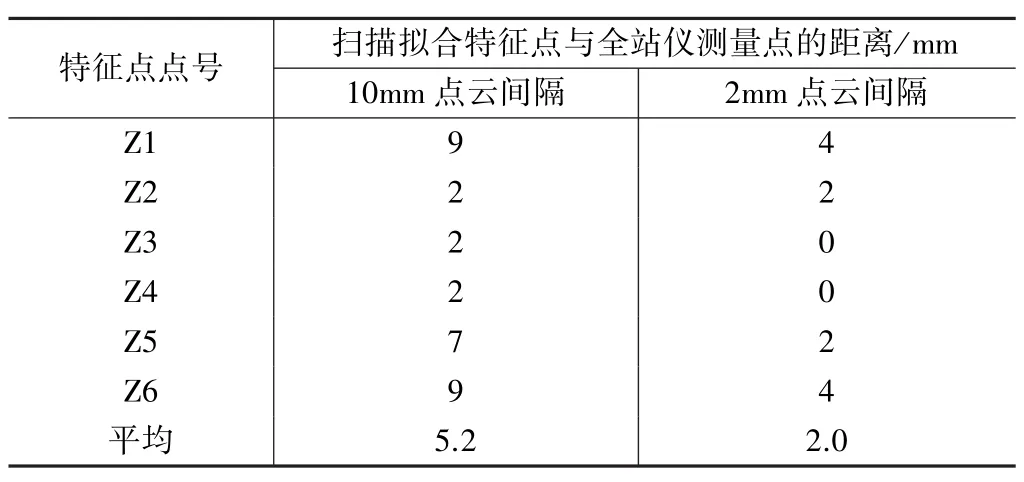
不同点云间隔设置数据处理表 表1
通过数据分析可知,在点云激光标靶不重叠的情况下,高密度的点云间隔拟合平面精度高于低密度点云拟合平面精度。当建筑物表面为平面且结构简单时,采用高密度扫描和低密度扫描得到的点云数据质量都能达到毫米级。在实际工作中,对于非高精度的测量项目,可以采用厘米级的点云间隔设置进行扫描,这样可以有效缩短外业扫描时间,提高工作效率,同时也能满足工程需要。
5.3 轮廓线提取方法研究
建筑物的表面可以看作是由许多不同形状的平面组合而成的,各个平面的交线就可以看做是建筑物的轮廓特征线。轮廓线提取精度是三位立体建模精度中起决定性因素之一,也是反映仪器测量精度的重要指标之一。因此,本次研究采用两种方法测量提取建筑物轮廓线并进行比较。
第一种方法是直接整体扫描两个墙面,并对点云数据建立表面模型,从而提取轮廓线,如图7所示(图中竖线表示提取的建筑物轮廓线,4个点表示全站仪测量的轮廓线上点数据,数值表示提取轮廓线与测量点之间的差值)。

图7 直接扫描数据拼接后拟合轮廓线与测量点间的距离示意图
第二种方法是通过分别单独扫描相邻的两个墙面,对两个墙面进行平面拟合,再通过计算两个拟合平面交线来提取轮廓线,如图8所示(图中竖线表示提取的建筑物轮廓线,4个点表示全站仪测量的轮廓线上点数据,数值表示提取轮廓线与测量点之间的差值)。

图8 两次扫描数据拟合轮廓线与测量点间的距离示意图
把两种方法得到的轮廓线数据与TCA2003全站仪测量数据进行比较结果如表2所示。

拟合轮廓线与全站仪测量特征点的距离 表2
从表2可以看出,两个平面交会拟合的轮廓线与全站仪测量特征点的距离要大于直接扫描整个建筑物拟合轮廓线的距离,说明直接扫描整个被测量体获取轮廓线的精度要高于将被测量体分开扫描后拟合轮廓线的精度。但是,两种方法扫描的误差都在毫米级,因此对于常规测量两种方法都可以满足精度要求,而高精度测量时应采用第一种方法。
6 结 语
本文采用三维激光扫描技术,针对建筑物轮廓线在点云数据中的拟合提取精度以及数据采集时扫描点云间隔设置对精度的影响等进行了研究。得出了在点云激光标靶不重叠的情况下,高密度点云间隔获取的数据拟合平面精度高于低密度获取的点云拟合平面精度;直接扫描整个被测量体获取轮廓线的精度要高于将被测量体分开扫描后拟合轮廓线的精度。对于本文中采用的方法,数据处理结果都能达到毫米级,在实际工作中,建议对常规工程采用厘米级扫描间隔设置,这样既能满足工程需要也能提高工作效率;对于有高精度要求的项目,可以选定需要区域采用毫米级的点云间隔进行扫描。
[1] 杨俊志,尹建忠,吴星亮.地面激光扫描仪的测量原理及其检定[M].北京:测绘出版社,2012.
[2] 张毅,闫利,杨红等.地面三维激光扫描的系统误差模型研究[J].测绘通报,2012,1:16~19.
[3] 朱光.三维激光扫描测量技术探究及应用[J].模具工程,2009(4):52~53.
[4] 马立广.地面三维激光扫描测量技术研究[D].武汉:武汉大学,2005.
[5] 欧斌,黄承亮.三维激光扫描技术在分方测量中的应用研究[J].城市勘测,2012,2:123~125.
[6] CJJ/T8-2011.城市测量规范[S].
两江新区地理国情监测技术达国内领先水平
(本刊讯)近日,由重庆市勘测院承担的“两江新区地理国情监测”项目在北京顺利通过重庆市科学技术委员会组织的以中国工程院刘先林院士为主任的专家委员会评审。与会专家一致认为该项目成果整体上达到了国内领先水平。
该项目针对山地城市特点,结合两江新区现状条件,利用翔实准确的数据源,形成了形式多样的监测成果,建立了两江新区多源数据本底数据库,构建了可视化查询检索应用平台。该监测技术创新地采用了高精度的多源数据分类提取方案、有效抑制线性噪声的变化检测、改进的遥感影像指数分析、地理国情信息的综合分析等技术。同时,还利用了重庆市勘测院的国家发明专利技术提取地面光谱影像变化数据。
两江新区地理国情监测项目在两江新区的应用将有力推进新区建设,帮助了解和掌握两江新区基本地形地貌、城市建设、社会经济等各方面的综合情况,为两江新区的科学管理和合理规划提供决策支持,同时也为重庆市即将全面开展的地理国情普查工作提供了宝贵的经验。
(重庆市勘测院 胡开全供稿)
The Research of Building Contour Fitting Precision0020Base on 3D Laser Scanning Technology
Kong Xiangling,Ou Bin
(Chongqing Survey Institute,Chongqing 400020,China)
3D Laser Scanning Technology cans high-accuracy,magnanimity,fast get object’s 3d coordinate,and establish precise 3dmodel of object,precise 3dmodel iswidespread used in allwalks of life.But contour line extraction accuracy is decided to one of the factors in 3d modelmaking precision.This paper used RIEGL VZ-1000 3d laser scanner to scanning the people of Chongqing building,research the method of building scanning the point cloud interval setting and contour line extraction.
3d laser scanning technology;spatial resolution;point cloud data;scanning
1672-8262(2013)03-117-04
P234.4
B
2012—07—27
孔祥玲(1973—),女,高级工程师,主要从事工程测量工作。
