从机载LiDAR点云数据中快速提取建筑物的方法研究
2013-03-03龚威平李云帆陈卓龙超
龚威平,李云帆,陈卓,龙超
从机载LiDAR点云数据中快速提取建筑物的方法研究
龚威平1∗,李云帆1,陈卓2,龙超3
提出一种从机载LiDAR点云数据中快速提取建筑物的方法。首先通过渐进三角网滤波得到地面点和不规则三角网,再通过三角网的区域生长和多条件阈值提取出候选建筑物轮廓,然后对提取出的初始建筑物点云采用两种策略去除噪声点,最终得到准确的建筑物点云,并通过实际数据进行了验证。
LiDAR;建筑物提取;滤波;区域生长
1 前 言
随着地球空间信息技术及其相关学科的飞速发展,三维数字城市的构建已经成为城市规划和建设领域的重要组成部分,能够为城市发展提供科学决策依据,全面提高政府规划、宏观调控、市场监管、社会管理与公共服务等方面的水平和效率。数字城市建设的首要内容是城市地区建筑物三维信息的获取,而作为一种新型的主动传感器,机载激光雷达(Airborne LiDAR)通过集成定姿定位系统和激光测距仪,无需摄影测量处理的影像匹配过程即可直接获取目标的高密度三维点云数据,同时可以准确获取地物间的几何拓扑关系,是一种经济、可靠的地表三维空间数据采集技术,目前已经成为城市三维建筑物模型获取的一种重要手段,具有广阔的应用前景[1~6]。因此,研究如何快速、准确地从LiDAR点云数据中提取出建筑物具有重要的现实意义。
从机载LiDAR数据中提取建筑点云数据包含以下两步:①从原始DSM数据中提取出建筑表面点,即建筑脚点;②分割建筑点。通常将这种建筑物提取的策略称为F-S方法[7]。众多学者在此领域展开了研究,如Weidner和Ameri等利用DSM和DTM之间的差异检测出建筑物区域[8,9];Masaharu等将点云分割成建筑物区域和非建筑物区域,再利用边界追踪算法分割单个建筑[10]。尤红建等直接应用激光采样点的原始三维位置来提取建筑物的方法,通过DSM影像的分割、边缘提取、边缘跟踪等步骤准确地提取建筑物的边缘轮廓线[11]。总体上说,通常使用的方法都是先检测出建筑物区域,然后针对这些区域进行边界跟踪、提取。
本文在总结现有文献的基础上,提出一种从机载LiDAR点云数据中快速提取建筑物的方法,结合了点云滤波、区域生长和点云去噪等多种技术,并通过实际数据对其进行了验证。
2 机载LiDAR点云滤波
机载LiDAR点云数据滤波是指从点云中分离地面点和非地面点的处理技术和方法[12],是建筑物提取步骤的重要前提。机载LiDAR点云数据是一种特殊形式的数字表面模型(DSM),其中包括地面表面和地物表面。地物与地面的高差造成地物边缘处的不连续性,所有滤波算法本质上都是基于对这种不连续性的估计。依据各种算法对于局部范围内地面点结构特征的假设不同,产生了各异的表面不连续性的估计方法,一般有:①基于局部脚点间斜率(或高差)的估计方法;②基于局部属性估计与内插的方法;③基于分割后拓扑关系重建的估计方法。国际摄影测量与遥感学会(ISPRS)曾专门对其中8种滤波算法进行了详细的测试和评价[13,14]。其中Axelsson提出的渐进加密式三角网滤波算法十分适宜本文研究背景,其优势在于:①该算法普适性较强,在多种地形条件下均有较好的效果;②滤波的同时可以获得地面点构成的TIN,便于下文候选建筑物区域提取。
迭代加密三角网滤波算法的基本思想即将整个地形表面逐渐细分为一系列细小的三角形平面面片,从而将LiDAR点云滤波转换为搜索一系列具有相同地形特征的平面面片的过程,其流程为:
(1)对点云数据构建格网索引,格网的大小由用户设定,取决于点云数据中最大地物(通常为建筑物)尺寸,以确保每个分块内必然包含地面点。对于格网中的每个分块,搜索其最低点作为地面种子点;并对所有地面种子点构建TIN,作为初始的地表模型。
(2)第二步是一个迭代过程,每次迭代中,依次判断余下脚点是否满足加入地面的条件。①点到地面高度的判别依据;②点与地面构成坡度的判别依据。
(3)“镜像点”修正。以上的判别准则对于连续地表效果较好,但是对于地表高程突变处的脚点通常会出现高度阈值超限的情况,从而被错误地分为地物点。算法将该点所在的三角形的邻接三角形都纳入考虑范围,加入“镜像点”修正在地表不连续处的判断准则。
(4)算法重复上述过程直到所有点都分类为地面点或者地物点,或者达到用户事先设定的某个限制条件,如迭代次数上限、三角形个数上线、三角形边长下限等等。
3 建筑物点云提取
3.1 候选筑物区域提取
如前文所述,应用渐进加密式三角网滤波算法的优势在于可以直接得到由地面点构成的二维Delaunay三角网,即TIN形式的DEM。由于建筑物点云已经作为地物点被剔除,因此潜在的建筑物区域必然对应着DEM中的空洞区域,也就是TIN中具有较大边长的三角形组,如图1所示。本文提出一种基于长度约束的三角形生长算法,对建筑物区域的点云进行定位和提取。此方法旨在快速获得候选建筑物区域的初始位置,并得到其相应的边界多边形。记滤波所得地面点三角网为Dt,这个过程实际上可以转化为求取Dt中空洞区域的问题。包括以下步骤:
(1)Dt中的三角形具有两个标记属性:其一为访问与否,取值为{Tag_Unvisited=0,Tag_Visited=1};其二为是否包含长度超限的边,取值为{Tag_TooLong= 0,Tag_Normal=1}。
(2)设定三角形最大边长阈值T_EdgeLength,通常为目标区域内最小建筑物的宽度。对Dt中所有三角形进行一次迭代,将包含长度超限边的三角形标记为Tag_TooLong,其余三角形标记为Tag_Normal,并将所有三角形标记为Tag_Unvisited。
(3)创建一个空的临时三角形链表Ltri和用于保存三角形分组的链表Lgroup,进行迭代生长过程:
①迭代Dt中所有三角形,如果当前三角形Tri未访问且被标记为Tag_TooLong,则作为生长的起始三角形,并加入Ltri中;
②创建一个新的三角形分组G,并将Tri加入其中;
③判断Tri的三个邻接三角形,如果其标记为Tag _TooLong且Tag_Unvisited,那么将其加入G,并加入Ltri的末尾,同时将Tri标记为Tag_Unvisited;
④重复①~③的过程,直到Ltri为空,则分组G的生长结束。将G加入Lgroup并跳转到步骤①。
(4)对于最终生长完成之后的三角形分组,通过搜索组内相邻三角形标记不一致的边,并按照逆时针顺序将其连接,即可得到建筑物初始区域的边界。

图1 候选建筑物区域提取
3.2 剔除非建筑物区域
由上述过程所得到的初始建筑物区域,存在许多错误检测结果。这些错检结果通常是由比较茂密的植被区域与低反射率区域(如水体)所造成的。为了能够准确地从中提取出正确的建筑物初始区域,以下多个参数被用来剔除错误检测结果。
(1)面积大小阈值
通常建筑物面积通常不小于50m2,所以,对于Lgroup中面积小于该阈值的三角形分组G予以剔除。由于本文主要针对城市地区的建筑物提取,一般取50 m2。
(2)最小包含点数阈值
建筑物具有一定的面积下限,因此其所包含的点云数量也具有一个最小值,这个值的大小与建筑物的最小面积与点云数据的平均点间距相关。同时,某些低反射区域(如水体等)仅包含极少的回波点,这些区域仅仅通过面积阈值是无法正确剔除的,而包含点数可以有效去除这些错误。本文一般取200为最小包含点数的阈值。
(3)多次回波比例阈值
多次回波是机载LiDAR的特性之一,也是区分建筑物区域与植被区域的重要特性[15]。机载LiDAR发射的每一束激光都具有一定的半径,当脉冲打到植被树冠上时,其中一部分能量立即反射回去,形成首次回波;剩下部分能量继续前行,穿透树冠打到树枝或树干上形成第二次回波;再有部分能量继续穿透植被打到地面上,形成末次回波,故同一束激光能同时获得多个距离观测值。因此最终机载LiDAR系统记录的回波信息包括单次回波和多次回波(首次回波、中间回波、末次回波)。通常大部分单次回波和末次回波多是来自于地表以及建筑物,而首次回波和中间次回波来自于植被。树丛分离的主要根据是在由树丛所形成候选区域中所包含的多次回波脉冲的比例较真实建筑物区域更大。目前绝大多数商业化的LiDAR系统都能够提供多次回波信息,因此这种方法是可行的。
3.3 噪声点的剔除
通过上述步骤,得到了候选建筑物区域的轮廓多边形,通过依次判断激光脚点是否在某一个建筑物多边形内可以获得每一个建筑物区域所包含的点云。这只是一种粗略提取,目的是尽量包含所有建筑物脚点,因此提取的结果中包含了很多的噪声点,需要进一步的剔除。这主要涉及两个方面:
(1)利用平均空间距离阈值剔除噪声点
本文针采用一种基于k-d树的平均空间距离方法对噪声点进行剔除[16],主要包括以下步骤:
①构建k-d树,建立拓扑关系;
②求点云中任意一点p的KNN邻域;
③计算该点与邻域内个点的平均距离值dis;
④判断平均距离值是否超过设定的阈值。如果超过,则认为该点为噪声点,予以剔除。根据需求,一般取阈值为平均点间距的2.5倍;
⑤重复步骤②~④,直到所有的点都处理完毕;⑥输出去噪之后的点云。
在实际应用中,这种方法无论是速度还是去噪效果都能达到比较令人满意的程度但是也存在一定的缺陷:当有较多噪声点聚集在一起时,这种方法不容易正确识别,需要加入另外的方法进行进一步处理。
(2)利用平面拟合误差阈值剔除粗差点簇
由于目前大多数人工建筑物的屋顶都由平面组成,即便是曲面构成的屋顶,在局部范围内也可以用一个平面进行逼近。这一特点反应在点云数据上表现为对局部范围内的点进行平面拟合后的中误差将处于较低的水平。以此为依据,可以将聚集在一起的较大粗差的点簇予以剔除。由于平均空间点距大的同时意味着平面拟合的误差也较大,因此前一步中实际上已经剔除了大部分的粗差点,同时记录了每一个点的平均空间点间距,因此本步骤中首先对剩余的点依据其平均空间点间距进行降序排序,然后以一定比例(本文为2%)取排在前列的点,计算其K邻域点平均拟合的中误差σ,当σ大于一定阈值T_σ时,则认为该点为粗差,本文中T_σ一般取值0.2 m。
4 实 验
本文选择了两块城区的数据作为实验数据如图2中(A_1)和(B_1),其中数据A包含307万个激光脚点,航向平均点间距为0.7 m,旁向平均点间距为0.65 m,在城区范围平均点密度约为2.04点/m2数据B包含277万个激光脚点,航向平均点间距为0.6 m,旁向平均点间距为0.67 m,其中建筑物区域平均点密度约为2.5点/m2。两块地区的数据采用的滤波参数如表1所示,滤波结果如图2(A_2)和(B_2)。
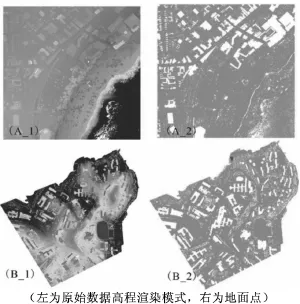
图2 三角网滤波算法结果
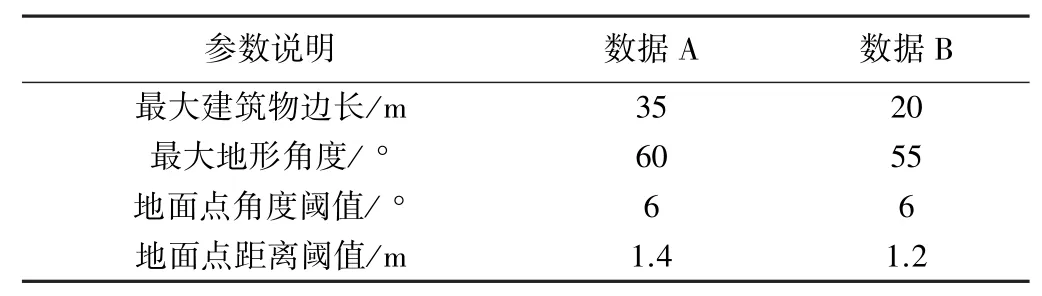
滤波参数 表1

图3 候选建筑物区域检测结果
候选建筑物区域的提取结果如图3所示,其中第二列为候选区域提取得到的矢量结果。从图中可以看出基本上实验区域内所有建筑物都被正确提取出来。然后对提取出的初始建筑物点云进行去噪处理,图4展示了对实验区域内的某个建筑物的处理效果。
过上述操作,最终得到了所有的建筑物屋顶点云数据,而且同时对属于一栋建筑物的点云进行了区分,取得了较好的结果,如图5所示。
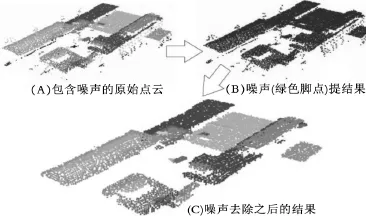
图4 利用平均空间距离阈值剔除噪声的效果
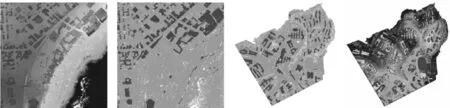
图5 建筑物提取结果(右1~3图中红色为提取的建筑物点云)
5 结 语
本文首先介绍了从LiDAR点云数据中提取建筑物的研究现状,在总结和分析各种方法优劣的基础上,提出一个完整的技术流。首先利用滤波方法得到地面点云;然后提出一种基于边长约束的三角网区域生长算法从滤波后的LiDAR点云中提取出候选的建筑物区域,得到单栋的建筑物点云数据。实验证明了本文方法的有效性,能够快速、准确地从原始点云数据中提取出真实建筑物点云。能够为进一步的数据分析工作提供保障,具有实用价值。
同时,本文方法虽然无需太多人工干预,但是其中所涉及的多种阈值的设定,其自适应程度不高,需要进一步研究解决。
[1] Zhou,G.,C.Song,J.Simmers,et al.,Urban 3D GIS from Li-DAR and digital aerial images[J].Computers&geosciences,2004,30(4):345~353.
[2] Rottensteiner,F.and C.Briese,A new method for building extraction in urban areas from high-resolution LIDAR data. international archives of photogrammetry remote sensing and spatial information sciences,2002,34(3/A):295~301.
[3] You,S.,Hu,J.U.Neumann,et al.,Urban Site Modeling from LiDAR.Computational Science and Its Applications aICCSA [C].2003:987~987.
[4] Brovelli,M.and M.Cannata,Digital terrain model reconstruction in urban areas from airborne laser scanning data:Themethod and the example of the town of Pavia(Northern Italy).international archives of photogrammetry remote sensing and spatial information sciences,2002,34(2):43~48.
[5] Miliaresis,G.N.Kokkas,Segmentation and object-based classification for the extraction of the building class from LIDAR DEMs[J].Computers&geosciences,2007,33(8):1076~1087.
[6] 李德仁,李清泉,杨必胜等.3S技术与智能交通[J].武汉大学学报·信息科学版,2008,33(004):331~336.
[7] 任自珍,岑敏仪,张同刚等.LiDAR数据中建筑物提取的新方法Fc-S法[J].测绘科学,2010,35:3.
[8] Weidner,U.and W.F rstner,Towards automatic building extraction from high-resolution digital elevationmodels[J].ISPRS Journal of Photogrammetry and Remote Sensing,1995,50(4):38~49.
[9] Ameri,B.and D.Fritsch.Automatic 3D building reconstruction using plane-roof structures[A].ASPRS.2000.Washington DC[C].
[10] Masaharu,H.and H.Hasegawa,Three-dimensional city modeling from laser scanner data by extracting building polygons using region segmentation method[J].International Archives of Photogrammetry and Remote Sensing,2000,33(B3/1;PART 3):556~562.
[11] 尤红建,苏林,李树楷.利用机载三维成像仪的DSM数据自动提取建筑物[J].武汉大学学报·信息科学版,2002,27(4):6.
[12] 张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社,2007.
[13] Sithole,G.and G.Vosselman,Report:ISPRS comparison of filters[A].ISPRSCommission III,Working Group,2003,3.
[14] Sithole,G.and G.Vosselman,Experimental comparison of filter algorithms for bare-Earth extraction from airborne laser scanning point clouds[J].ISPRS Journal of Photogrammetry and Remote Sensing,2004,59(1-2):85~101.
[15] 黄先锋.利用机载LiDAR数据重建3D建筑物模型的关键技术研究[D].武汉大学,2006.
[16] Saleem,W.,O.Schall,G.Patanè,et al.,On stochastic methods for surface reconstruction[J].The Visual Computer,2007,23(6):381~395.
实践校企合作办学模式 成就海西地信服务专家——福州市勘测院在职研究生课程班顺利开班
(本刊讯)校企合作办学,是企业实现人才开发增值的新途径,也是当前教育改革的重要方向。福州市勘测院作为海峡西岸经济区城市地理信息服务专家,为加大人才储备力度,持续提升服务能力,近年来致力于加强校企合作力度,积极推进在职研究生层次教育,不断为海西智慧城市的发展作出新的贡献。
2013年,在福建省测绘地理信息局、福州市国土资源局等上级领导的关心与支持下,武汉大学与福州市勘测院联合开设的测绘工程(GIS方向)在职研究生课程班于5月30日顺利开班。福建省测绘地理信息局、福州市国土资源局、武汉大学资源与环境科学学院及福州市勘测院领导出席了开班仪式并做重要讲话。
福建省测绘地理信息局林孝文副局长首先对在职研究生课程班的开办表示祝贺,对福州市勘测院与高校联合组织在职研究生教育的方式给予高度肯定,对武汉大学一直以来在测绘地理信息领域的科学研究及人才培训所作的贡献表示感谢,并对课程班的教学工作做了重要指示,要求校企双方精诚协作,“把好事办好、把实事办实”、“办真学、办好学”。武汉大学资源与环境科学学院陈晓榕书记为与会人员深入介绍了我国研究生教育体系以及本次课程班后续的教育模式,并对课程班学员寄予了殷切期望,提出了严格要求。
福州市勘测院钱兆向院长在发言中回顾了福州市勘测院60年的发展历程,强调了人才对企业长远发展的重要意义,并分析了福州市勘测院培训工作实施现状及问题,指出校企联合办学将是福州市勘测院人才战略的重要组成部分,也将是本院测绘地理信息产业战略目标的强大推进器。希望全院进一步统一思想,把人才上升到战略资源层面,有效开展“种子计划”、“树苗计划”;要把办好研究生班作为重要工作,认真抓好教学组织,争取做到工作学习双促进;同时希望全体学员珍惜学习机会,明确目标,刻苦学习,努力成长为理论实践双过硬的复合型人才。最后,学员代表邱健丽代表全班34名学员对各级领导的关心表示感谢,并承诺将以“最饱满的热情,最全面的投入,最实际的行动”完成学业。
本次开班仪式的召开,标志着武汉大学、福州市勘测院校企合作框架的正式启动。课程班将在各级领导和武汉大学的指导下,严格遵照教育部及武汉大学在职研究生教育的各项政策,按照研究生培养方案,严格教学管理,为单位及行业输送更多高学历、高技能、高素质的测绘地理信息复合型精英。
(福州市勘测院办公室供稿)
(1.住房和城乡建设部城乡规划管理中心,北京 100835; 2.武汉大学遥感信息工程学院,湖北武汉 430079;3.中国水电顾问集团贵阳勘测设计研究院,贵州贵阳 550083)
A Study of Fast Building Extraction from Airborne LiDAR Point Cloud Data
GongWeiping1,Li Yunfan1,Chen Zhou2,Long Chao3
(1.The Administration Center of Urban-Rural Planning,MOHURD,Beijing 100835,China 2.School of Remote Sensing and Information Engineering,Wuhan University,Wuhan 430079,China 3.HYDRO China Guiyang Engineering Corporation,Guiyang 550083,China)
A method for fast building extraction from airborne LiDAR point cloud data is proposed in this paper. Firstly,ground points are extracted by progressive TIN filtering algorithm.Then a building detection strategy based on region growing algorithm and multiple thresholds is utilized for obtaining initial building points and rough boundary.The accuracy points are finally extracted after two steps of noisy points eliminating.Experiments are conducted to demonstrate the efficiency of the proposed method.
LiDAR;building extracting;filtering;region growing
1672-8262(2013)03-84-05
P237,P234.4
A
2013—01—18
龚威平(1958—),男,副研究员,主要从事遥感技术在城乡规划中的应用研究和管理工作。
住房和城乡建设部科研开发项目(2008-K9-12)
