时空综合被动定位在机动目标跟踪过程中的应用
2013-02-26杨茂林
杨茂林
(江苏自动化研究所,江苏 连云港 222006)
传统的目标运动分析有多种实现方式,如基于纯方位的目标运动分析,它的缺点是本艇必须机动。继纯方位的目标运动分析后,人们又开始对方位/频率目标运动分析研究,它的优点是无须本艇机动,就可估计目标的位置和其它运动参数。但以上两种方法都是在检测和跟踪后进行目标运动分析的,要求的信噪比比较高。由于海洋信道结构复杂,导致接收信号起伏变化,短时时空谱的谱峰时强时弱,甚至可能低于检测门限。而且随着目标辐射噪声的不断减小,武器射程的不断增大,传统的目标运动分析方法越来越不能满足实际的需要,所以在低信噪比条件下目标的定位与运动分析就显得尤为重要。
时空综合被动定位方法(STI定位方法)是针对低信噪比条件下的目标运动分析方法,对传统的方位/频率TMA方法做了一些改进,直接用水听器数据作为运动参数估计的输入,将目标检测与参数估计融为一体,可有效地解决低信噪比情况下的运动目标定位和分析。它利用时空积累,得到长时间的时空谱,再通过合适的优化算法优化时空谱,从而获得目标运动参数的精细估计。由于不需要事先给出方位、频率的估计值,因而避免了谱峰跟踪、峰值检测等信号处理难点;而长时间积分,既可增强检测性能,又能提高处理增益,使得该方法可有效地解决远距离、低信噪比情况下的目标定位问题。另外,频率信息的利用,使得该方法更容易实施,不需要本舰机动,而只要求本舰和目标之间保持相对运动。
在过去的文献与工作中,主要研究的是目标匀速直线运动条件下的STI定位方法,而且主要给出的是理论探讨,将STI法应用在对机动目标进行定位跟踪的研究还很少涉及,因此将从STI模型优化入手,并将其推广到对机动目标的定位跟踪应用中。
1 时空综合被动定位原理
如图1所示,假设入射信号为平面波,目标与拖线阵声纳的接收阵保持相对匀速运动状态。
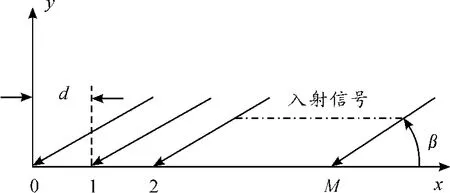
图1 信号与均匀接收阵的示意图
目标的辐射噪声信号(由宽带连续谱信号、调制谱信号和单频线谱信号组成)在观测时间内的平均时空谱(FRAZ谱)可表示为

Bk(fk,cosβk)为第k时刻的短时谱;bk相当于水听器数据的二维付氏变换;“*”表示取共轭。式(2)中的wh、wf分别为空间、时间窗函数,现为矩形窗,Hk(m,n)为第m个水听器的输出;M为基元总数。在观测时间内,将数据分为K组,每组数据长度为N。fs为采样频率,c为水中声速,d为水听器间距,取坐标原点为参考点,则第m个基元相对于参考点的声程差可表示为 mdcosβk。
若以(xk,yk)代表目标tk时刻的位置,(vx,vy)为目标相对于接收阵的运动速度,f0为目标静止时的信号频率,rk是tk时刻的目标位置坐标和径向距离,则有

给定一个目标运动参数矢量^p,就对应着一条假想的目标轨迹。对假想轨迹上每一点计算对应的频率、方位值(fk,cosβk),之后由式(2)计算短时谱Bk,所有的Bk相加,即得到整个观测时间内的合成功率谱。当假想轨迹的频率、方位值(fk,cosβk)与实际目标信号的频率、方位值吻合时,合成功率谱〈B(p)〉达到最大值。对应的矢量^p就是目标参数的估计值。这就是STI的原理,图2给出了算法的一条搜索轨迹。
观察式(1)与式(3)式,bk有2个参数:fk和 βk,这2个参数是随时间变化的。常规的TMA算法比如方位-频率法需要从声纳的输出端获取接收信号频率序列fk和方位序列cosβk,以此作为解要素算法的输入,这便不可避免的会遇到诸如谱峰的检测和跟踪等信号处理难点,尤其当目标信号信噪比较低或由于传输信道影响造成某段时间的信号衰落的情况下,上述困难尤为突出。而STI法直接以水听器接收信号Hk(m,n)作为算法的输入,无须获取信号频率与方位序列,避免了上述困难。

图2 方位-频率谱在时间上搜索路径示意图
2 时空综合被动定位在机动目标跟踪的推广
从STI定位原理可以看出,STI定位方法的首要任务是假设目标的运动状态(即目标的运动轨迹),假设目标运动直线运动,则能描述目标轨迹的参数通常为 D0,B0,Dn,Bn,或者D0,B0,Vx,Vy,当确定了轨迹参数了后,就可对这些轨迹参数进行寻优从而得出最终的目标运动参数。同理,当目标机动时(只机动一次),则能描述目标轨迹的参数通常为D0,B0,Dj,Bj,Dn,Bn,tj或者 D0,B0,Vx1,Vy1,Vx2,Vy2,tj,其中 Dj,Bj表示目标机动时刻对应的目标距离和方位,Vx1,Vy1,与Vx2,Vy2,分别表示目标机动前和机动后的速度分量。因此,只要对这目标轨迹的参数进行寻优,就可得到最优的目标轨迹,而最优的目标轨迹其时空谱的累积值也应是最大的。
1)目标机动时刻已知
当目标机动时(假设只机动一次),并且已经目标机动的时刻,则目标的运动参数矢量可假设为 p=(D0,B0,Dj,Bj,Dn,Bn,f0)。
此时目标初始位置点坐标为

目标机动时刻位置点坐标为

目标运动终点位置坐标为

目标机动前相对于阵的运动速度为

其中tj表示目标发生机动的时刻点。
目标机动后相对于阵的运动速度为

目标tk时刻的位置坐标为

目标的径向距离为

与跟踪非机动目标原理类似,给定一个矢量^p,就对应着一条假想的目标轨迹。对假想轨迹上每一点(xk,yk)计算对应的频率、方位值(fk,cosβk),之后由式(2)计算短时谱 Bk,将短时谱累积得到整个观测时间内的合成功率谱〈B(p)〉,并搜寻合成功率谱的最大值,从而得到相应的目标运动参数。
2)目标机动时刻未知
当目标机动时(假设只机动一次),并且机动时刻未知,则目标的运动参数矢量可假设为 p=(D0,B0,Dj,Bj,Dn,Bn,tj,f0),tj表示目标发生机动的时刻点,Dj,Bj表示目标机动时刻对应的目标距离和方位。此种情况下对目标tk时刻的位置坐标与径向距离的公式与目标机动时刻已知的公式原理一样,参考式(9)与式(10)。不同的地方就是在搜寻最大功率谱〈B(p)〉时,未知数的参数又扩充了一维。
3 算法实现
对于时空综合被动定位,目标位置参数的估计是通过优化时空谱〈B(p)〉得到的,时空谱的计算比较耗时,因此,该方法实现的一个主要问题是计算量大。为了实现有效的定位,一方面要选取合适的优化算法,并研究时空谱的快速计算,另一方面要充分利用先验信息,如频率和方位的信息等,提高算法效率。时空谱优化的方法很多,如网格法、改进的牛顿迭代法和遗传算法。下面讨论基于网格法的时空综合被动定位方法的快速实现,及频率、方位信息的提取。
1)方位频率信息的提取
利用传统的波束形成和线谱提取方法,可以来粗略地估计目标的方位(包括初始方位)和线谱频率。获取这2个参数的目的一方面为了和后面将要采用的优化方法计算的相应要素比较以验证其正确性另一方面,可以缩小算法对目标方位和线谱频率的搜索范围,这样做带来的好处不仅仅是减小运算量和提高精度,而且可以提高算法的收敛率。
对某一时刻接收到的阵列信号进行波束形成,得到不同方位的波束输出。对宽带平面波信号,波束输出为[1]

其中:M为基元数;ϑ为引导方位;n0,m为第m个基元的延时补偿量。对于图3 所示的线列阵,n0,m=(m -1)dcosϑ/cΔ,d为基元间距,Δ为声速,为采样间隔。最大波束输出对应的方位即为目标方位。将不同时间、不同方位的波束输出投影到方位-时间平面上,即得到方位-时间历程图,由此可确定一段时间内目标的起始方位和终止方位。
利用波束输出得到目标方位后,在目标方位上,对所有的阵元信号进行延迟、相加,即得到波束输出序列[1]

其中β为目标方位。对波束输出序列,用FFT计算其频谱,得

其中N为数据长度。在目标线谱处,频谱的幅度为最大。利用不同时间的频谱,可得到频率-时间历程图,由此可提取目标的频率信息。
2)种子分裂算法原理及应用
种子分裂算法是一种高效率的穷举法,它既可以满足可靠性方面的苛刻要求,即它总能够找到全局最优解,又能在搜索过程中自动安排搜索点的顺序。
考虑极值问题(A):
设G(Θ)是一个n维的非线性函数,取值为正。求Θ∈[a,b]n,满足

在G(Θ)的每次求值花费很长计算时间的情况下,求解问题(A)的计算时间主要取决于G(x)的求值调用次数。随着计算机硬件的发展,计算机内存成为廉价的计算资源。基于此。提出了充分使用计算机内存以节省计算时间的思路,并由此提出求解问题(A)的一种新的非线性规划方法——种子分裂算法(SDA)。该方法是一种确定性方法,易于控制,能保证得到指定精度的全局最优解。同时,它还具有很高的计算效率。换言之,这种方法同时兼具上述各种算法的优点。种子分裂算法的缺点是计算时所用的计算机内存要比传统方法大一些。SDA是针对具体物理问题一海底参数反演间题及海洋中目标定位间题而设计的,它的有效性已在具体的物理应用中得证实。本文的目的在于针对一般性的非线性全局最优化问题(A)讨论该方法涉及的理论问题,以便于它在其它可能领域中的应用。

称为种子分裂函数。特别设计了2种分裂函数F2和F3如下:
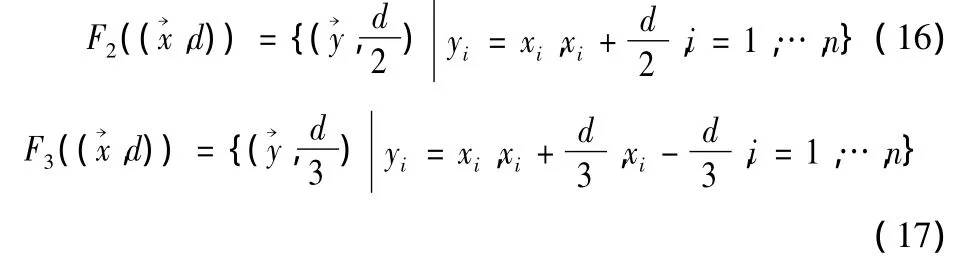
式中:xi,yi分别表示向量和的第i个分量。
SDAA2(采用分裂函数 F2)和 SDAA3(采用分裂函数F3)都可以用来求解问题(A),如图3所示。

图3 种子分裂形式
下面仅以SDAA2为例,来说明将SDA算法在利用STI跟踪非机动目标中的应用。
将算法中的目标函数G(→x)替换为时空谱〈B(p)〉,即求时空谱的最大值以及时空谱取最大值时相对应的参数p*=(x0,y0,xt,yt,f0)。
SDAA2:
a)初始化
1)初始化速度权参数γ>0,迭代次数ω及初始网格数M,一般地,可取 γ =1,M=1;
2)初始化各解算参数→x=(x0,y0,xt,yt,f0)的搜索范围[ax0,bx0]、[ay0,by0]、[axt,bxt]、[ayt,byt]、[af0,bf0],并全部将它们映射到[0,1]区间,即区间下界a=0,上界b=1;
3)初始化种子容器,它是由Mn(其中n=5)个种子组成的集合,这些种子具有形式

其中 i1,i2,…,i5是取值0到M-1的整数6。
b)对下述式(19)~式(21)迭代ω次
1)赋值j←1(变量j跑遍各次迭代);

5)变量j的值加1。此时,若j≤ω则转移到步骤2);否则转向步骤c),结束迭代。
c)输出求解结果
选择容器中的种子(Θ,dΘ)∈S(ω),使得

Θ可做为问题(A)的解,这个解的求解精度可以用dΘ来估计。
4 仿真计算与结果分析
1)态势仿真
假定接收阵为拖线阵声呐,水听器数M=48,间距d=2 m,水中声速c=1 480 m/s。坐标原点在接收阵,所有目标距离均相对于坐标原点计算。目标静止时辐射频率f0=300 Hz,而信号的采样频率fs=1 200 Hz,信号的信噪比SNR=-10 dB。主 要 考 察 的 态 势 范 围:初 距 D0∈{1 0,20,40}(km),目标速度 Vt∈ { 10,12,16}(kn),初始目标舷角∈[10°,80°],目标机动时的转向角度范围 ΔCt∈[ 30°,180°],机动时速度变化 ΔVt∈{3,6,12} kn,目标机动时刻 tj∈(6,14)min,总的观测时间 t∈(12,28)min。
随着距离的增大,观测时间也相应增加,为了减少计算量,可以丢弃部分数据(如表1),而且随着距离的不同,误差允许范围也不相同。

表1 各种态势下的仿真条件
2)水声信号仿真
水声信号的仿真流程图如图4所示,通过对目标和线列阵声纳各种参数的设置,例如目标的运动参数,目标的机动参数,声纳阵元数等等,生成水声信号并存储。由于数据量以及运算量相当大,因此对态势仿真时,将产生的宽带多途阵列信号全部存贮起来。
从仿真软件输入界面上可以看到,目标的跟踪时间或者机动时间,都是以文件个数为单位的。由于水声数据是以文件数的形式存储的,每个文件存储的是:48个阵元在采样频率为1 200 Hz的条件下,生成的1 024个水声数据。因此每个文件对应的是采样时间是1 024/1 200≈0.853 s。而为了水声数据的存储方便,当目标机动时,机动时刻的设置也是以周期(0.853 s)为单位。目标机动时水声信号的仿真软件操作界面如图5所示。

图4 浅海阵列信号仿真系统框图

图5 目标机动时水声信号仿真软件界面
3)优化算法参数设计
目标机动时STI的优化参数搜索范围的设置如下:
初始距离最大/小值:真值30%;
初始方位最大/小值:真值5°;
机动时刻距离最大/小值:真值30%;
机动时刻方位最大/小值:真值5°;
终止距离最大/小值:真值30%;
终止方位最大/小值:真值5°;
机动时刻最大/小值:真值±3min;
频率最大/小值:真值5 Hz;
4)仿真计算结果与分析
态势 1:D0=10 km,B0=30°,Vt1=10 kn,Ct1=180°,Vt2=13 kn,Ct2=210°,目标机动时刻:tj=700个周期(700×0.853 s),跟踪总时间:t=1 400个周期。仿真结果见表2。
态势 2:D0=10 km,B0=30°,Vt1=10 kn,Ct1=180°,Vt2=13 kn,Ct2=240°,目标机动时刻:tj=700个周期(700×0.853 s),跟踪总时间:t=1 400个周期。仿真结果见表3。
(注:下列表格中有关距离的数据单位为米,方位数据的单位为度,频率数据的单位为Hz,机动时刻的单位为1个文件周期0.853 s)

表2 态势1的STI算法仿真解算结果

表3 态势2的STI算法仿真解算结果
可以看出,对于上述的仿真态势,利用STI方法能够对机动目标进行有效的定位跟踪。利用STI方法进行定位时,不需要本艇进行机动。
1)从上述的仿真结果可以看出方位的解算精度平均在2°以内,距离的定位精度平均都在7%以内,对机动时刻的检测精度平均在1 min左右,频率的解算精度一般都在3 Hz以内;
2)目标的线谱频率和方位与其他参数相比,相对误差都很小,其原因是仿真数据中没有加入频率和方位时延误差。然而,实际接收到的数据由于受到水声传播信道的起伏、不均匀以及频散等效应的影响,会导致目标的频率或者方位时延产生一定的误差,从而影响STI的定位效果;
5 结束语
纯方位TMA的前提是目标做匀直运动,而且本舰做有效机动是其必要条件,对于大型舰船和声基阵,如拖线阵,在实际应用中受到很大限制;方位——频率TMA无需本舰机动,但要实现有效的目标定位,对方位,尤其是频率的测量精度有较高的要求,在远程探测的情况下,对声纳信号而言,稳定线谱的精确检测异常困难,因此严重限制了方位——频率TMA的定位性能。STI可以很好地解决这些问题,大量仿真实验也充分验证了:只要目标与本舰之间存在相对运动,无论目标机动与否,都可对目标进行有效跟踪和定位。
STI算法的实质是根据运动目标方位和多普勒频移的变化提取位置信息,对于径向运动目标,由于方位和多普勒频移没有变化,因此STI算法无法给出目标的位置,这是STI方法的一个固有缺陷。利用多阵信息,可以解决这一问题。减小计算量,提高计算速度,是STI方法有效实现需要进一步加以解决的问题。随着计算机硬件技术的发展,这一问题将逐步得到解决。可见,STI无论从原理方法,还是从技术实现上目前都不失为一种有效的水声定位方法。利用综合声纳的多阵信息,通过增大阵孔径和多阵信息的有效融合,有望进一步提高定位精度和定位的可靠性。
[1] 毛卫宁,陈励军.一种新的目标运动分析方法[J].声学学报,1998(23):417 -421.
[2] 施国全.低信噪比下运动目标的被动定位和参数估计[J].声学与电子工程,2000(2):5 -9.
[3] 代志恒,袁富宇.用于时空综合被动定位中的种子分裂算法[J],指挥控制与仿真,2007(1):12-14.
[4] 肖灵.浅海环境中的水声反演[D].上海:中国科学院声学研究所,1998.
[5] Nardone S C,Lindgren A G,Gong K F.Fundamental properties and performance of conventional bearings-only tracking[J].IEEE Trans.,1984(29):775 -787.
[6] Passerieux J M,Pillon D,Jauffret C.Target motion analysis with bearing and frequency measurement[C]//In Proceedings of the 22nd Asilomar Conference on SSC,Pacific Grove,CA,Nov.1988.
[7] Hassab J C.Contact localization and motion analysis in oceanic enviroment:a perspective[J].IEEE J.OCE-8,July,1983.
[8] 李居伟,孙明太,徐以成.一种改进的声纳浮标定位算法和 TMA问题[J].兵工自动化,2011(10):34-38.
[9] 王成,王英民,陶林伟,等.扩展卡尔曼滤波在双基地信息融合中的应用[J].火力与指挥控制,2010(9):13-15.
(责任编辑杨继森)
