直接力/气动力复合控制系统快速原型设计
2013-02-26郭雯雯马慧敏
郭雯雯,马慧敏,2,龚 铮
(1.中国空空导弹研究院,河南洛阳 471009;2.航空制导武器航空科技重点实验室,河南洛阳 471009)
在导弹制导控制系统的开发过程中,当系统算法设计完成后,可以通过MATLAB/Simulink进行数字仿真验证。但由于Simulink仿真大多为非实时仿真,且模型中的硬件环节只能利用数学模型模拟,使得其对于一些仿真实时性要求较高的场合,如存在数据采集、串口通信等实时仿真任务时,往往达不到预期的理想控制效果,同时由于建模的不精确以及干扰等其他因素,基于数学模型的数字模拟仿真环境,无法真实地反映系统的实际情况。为使设计精确,设计师必须不断对自身的设计做出调整,导致设计反复,研究效率偏低,开发周期过长,因此迫切需要开发新的验证设计手段以适应实时仿真要求。
快速原型系统仿真是实时仿真的一种,它处于产品研发的算法设计阶段与具体实现阶段之间,是产品研制过程中的一个重要环节。在系统研制早期,产品硬件还没有完成设计,由实时仿真设备模拟系统的控制部件,然后将控制算法加载到实时仿真设备中,通过快速原型系统在实时环境验证控制算法的性能。当系统产品设计完成后,在回路中通过真实的物理接口与硬件产品连接,对实际产品的各项功能、性能进行集成和测试。
1 基于RT-LAB的控制系统快速原型开发
1.1 快速原型开发平台系统组成
制导控制系统快速原型开发平台由原型开发系统和通用转换装置两部分组成。其硬件由1个RT-LAB仿真主机和3个RT-LAB仿真目标机组成。主机是模型开发和系统仿真运行的任务管理平台。控制系统的模型开发在主机上完成。主机和目标机之间通过TCP/IP连接,仿真目标机之间通过IEEE-1394连接。
快速原型开发平台组成如图1所示。仿真主机与主机上安装的RT-LAB仿真软件以及实时目标机对应到原型开发平台。HILBOX是针对快速原型开发系统设计的通用接口,并作为独立的节点接入原型开发系统,实现目标机上实时运行的数学模型与外部系统实物之间的I/O或数据通讯,实时目标仿真机的输入、输出信号经过该设备调理后同外部物理部件的信号相匹配。它是一种特殊的RT-LAB仿真目标机。HILBOX信号调理机箱对应到快速原型开发平台的通用转换装置。在RT-LAB仿真目标机的基础上,增加了信号调理功能,将现场参试实物的信号调理成目标机上的I/O卡能够直接处理的信号,或者将目标机上的I/O卡的信号调理成能够驱动实物的信号。
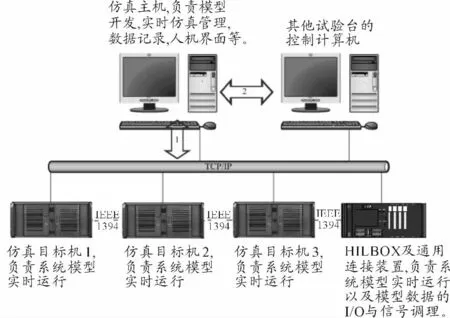
图1 制导控制系统快速原型开发平台系统
1.2 模型开发
利用RT-LAB对系统仿真软件的设计与开发,首先要在Matlab/Simulink环境下,对系统进行数学建模,并对模型做预处理,然后通过RT-LAB对系统的数学模型进行分割处理、编辑、C代码编译、代码生成等步骤,转换为可在实时仿真计算机上运行的实时代码,最后进行加载运行即可完成。
快速原型开发平台选择QNX 6.x作为目标平台。通过调用Matlab中的实时工作空间RTW来产生Simulink模型的C代码,在目标机中将C代码编译链接,即可形成RT-LAB可执行目标程序。在半实物仿真系统中,主机和目标机两者之间的通信以命令帧和响应帧的方式来进行。目标机分别承担模型运算、算法仿真运算等任务。每个目标机可以单独的运行,用于系统中相对独立的子系统的仿真和验证。
2 直接力/气动力复合控制系统快速原型设计
控制系统快速原型样机以直接力/气动力复合控制系统仿真模型为基础,利用制导控制系统快速原型开发平台和真实物理接口(422板卡),添加舵机实际物理接口控制模块,实现仿真实时代码的生成,进行实时仿真,实现直接力/气动力复合控制系统快速原型样机仿真。
2.1 直接力/气动力复合控制弹体模型与解耦控制设计
本文以纵向通道为例建立直接力/气动力复合控制弹体的数学模型[1],直接力/气动力复合控制弹体纵向通道运动方程为

其中:δa为纵向通道气动舵偏角,δs=fs/fsmax为直接力控制等效舵偏角,fs为喷流所产生的侧喷力,fsmax为喷流所产生的最大侧喷力 a1、a2、a3、a4、a5为导弹动力学系数,α 为弹体的攻角,为俯仰角速度,a3s、a5s为与直接力有关的动力系数。
自动驾驶仪采用前馈/反馈控制器结构形式,如图2所示。
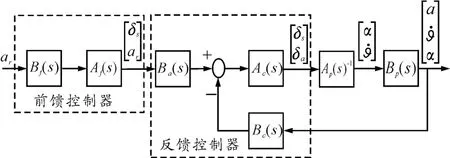
图2 基于前馈/反馈自动驾驶仪结构
其中气动力用于反馈回路,保证系统的稳定性与稳态特性;直接力用于前馈支路,由前馈控制器产生射流等效舵控信号及气动回路名义加速度指令,并实现直接力前馈部分与气动部分的解耦。其优点在于引入直接力前馈可以大幅提高系统响应的快速性;反馈回路仍可沿用现有成熟的控制结构,前馈部分不改变闭环极点,不影响系统稳定性。
2.2 控制系统快速原型样机设计
控制系统原型样机框图如图3所示。图3中虚线框边界部分通过422板卡实现了自动驾驶仪输出控制信号到舵机和舵机响应的舵偏角信号到弹体动力学模型的信息传递接口,在真实舵机存在的情况下,可以断开模型虚线框内部分,实现含真实舵机的控制系统仿真,更真实地验证自动驾驶仪的设计性能。
为了便于快速原型样机的生成,必须建立易于任务划分和功能合理的模块化Matlab/Simulink直接力/气动力复合控制系统数学模型,其模型可分为稳定回路模块,舵机模块,显示模块3个部分。
其中,稳定回路模块由根据导弹吹风数据建立的六自由度弹体动力学模型、弹体运动学模型、导航模型、控制分组件模型、舵机模型、传感器模型、直接力控制模型等模块组成。
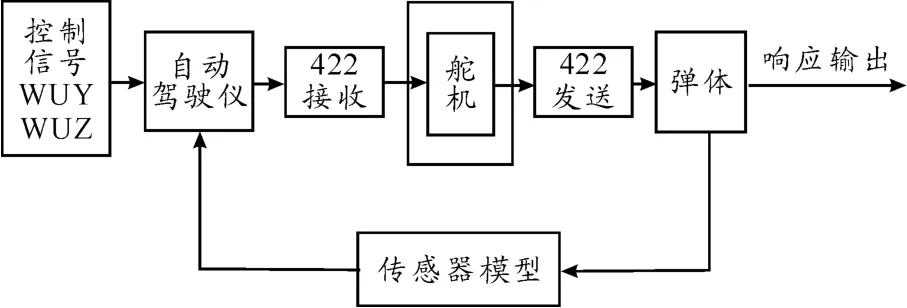
图3 控制系统原型样机框图
在完成系统模型数字仿真的基础上,按照RT-LAB建模规则分别命名SM_Stab_Loop、SS_DEL422和SC_Subsystem。然后将这3个分系统编辑成实时可执行文件,分配到不同的目标机上实时运行。
为验证引入真实422接口对控制系统模型的影响,故将舵机模块划分为一个独立的模块,由422板卡模块和虚拟舵机模块actuator组成,如图4所示。

图4 SS_DEL422模块
制导控制系统快速原型开发平台采用MOXA CP-118板卡,可提供8个通道的RS-232或RS-422/485串口通讯端口。为了使422板卡发送信号和舵机发送信号一致,设置板卡输出波特率固定为500kbps,每字设定为11位。根据某型舵机信息交换协议,通过C语言实现422模块发送接收信息算法的底层代码编写,封装成可拖拽的422发送模块和接收模块放在Simulink工具箱中,使用422模块时在模型参数设置中添加调用该算法的源文件(.c)以及头文件(.h)。422发送模块的输入为自动驾驶仪输出的4路舵控指令,根据协议,该板卡传输信息包含头字、控制ID和4路舵控指令,因此在控制系统原型样机设计时,422发送模块可根据协议设置头字、控制ID,和舵控指令一起拼成舵机控制信息包发送出去;422接收模块采集422接口输出4路舵反馈指令,送入仿真模型。
SS_DEL422模块中的虚拟舵机模块actuator为舵机等效二阶环节。在真实舵机存在的情况下,可以断开该环节,连接真实舵机硬件接口,实现含真实舵机的控制系统半实物仿真。
2.3 仿真与结果
仿真条件:导弹北向速度V=390 m/s,初始坐标为x=z=0,y=15 000 m,初始姿态角(俯仰角、偏航角、滚转角)为ϑ =0°,ψ =0°,ω =45°。在4 s和7 s时给定持续2 s的阶跃过载指令120 m/s2。给定阶跃过载指令的同时4 s和7 s时控制所有喷管向Y轴负向喷流,6 s和9 s时控制所有喷管向Y轴正向喷流。仿真步长为0.000 625 s。
直接力/气动力复合控制系统数字仿真和快速原型样机实时仿真的对比结果如图5所示。其中,WUY1、WUZ1为阶跃过载指令,wy1_au、wz1_au为复合控制系统数字仿真响应过载,wy1_yx、wz1_yx为快速原型样机实时仿真响应过载。

图5 控制系统数字仿真与快速原型实时仿真对比结果
由仿真结果可知:(1)快速原型实时仿真过载响应时间<0.1 s,与Matlab/Simulink环境下纯数字仿真曲线基本一致,仅存在小量的差异,满足设计要求,从而验证了直接力/气动力复合控制系统数学模型、控制算法以及快速原型系统的准确性和有效性。经分析,引起小量差异的主要原因在于系统噪声。
(2)由于快速原型开发平台引入实物的原因,带入了之前难以进行精确建模的非线性环节以及未建模动态特性,其仿真精度和置信度高于纯数字仿真。
3 制导控制系统快速原型平台与视景仿真系统联试试验
3.1 视景仿真系统
某型导弹视景仿真数据分析软件集合了强大的视景仿真功能,不仅可以进行数据分析,还可以进行外场靶试场景的真实回放和产品成果的演示。该视景仿真数据分析软件仿真部分的设计和编程采用VEGA编程技术,其传统的曲线与数字分析部分由美国国家仪器公司的Measurement Studio软件的图形控件编程实现,整体设计采用了面向对象的软件开发方法在VC++6.0下编程,能够提供逼真的视景效果,使用户可以在任意视角观察任意时间点的视景,简单的操作即可改变复杂的视景环境下的仿真速度、环境效果和观察视点。
3.2 系统联试试验设计
控制系统快速原型样机和视景仿真系统通过VMIC5565光纤反射内存卡进行数据通信。受试验项目时间局限,在视景仿真系统中简单的定义导弹直接力喷管为8个,均匀散布在导弹头部附近一周。在虚拟场景中,导弹的直接力喷管可以根据过载指令喷射火焰。在视景仿真系统中可以很直观的看到不同弹道飞行条件下直接力的作用效果以及直接力/气动力复合作用下导弹位置、姿态的改变。
将控制系统快速原型开发平台与视景仿真系统结合起来,可以把快速原型样机实时仿真的试验过程通过逼真的虚拟场景同步演示出来,能够直观的看到直接力/气动力复合控制对于导弹姿态的作用效果,大大满足了仿真试验的可视化需求。图6为直接力/气动力复合控制系统快速原型试验场景。
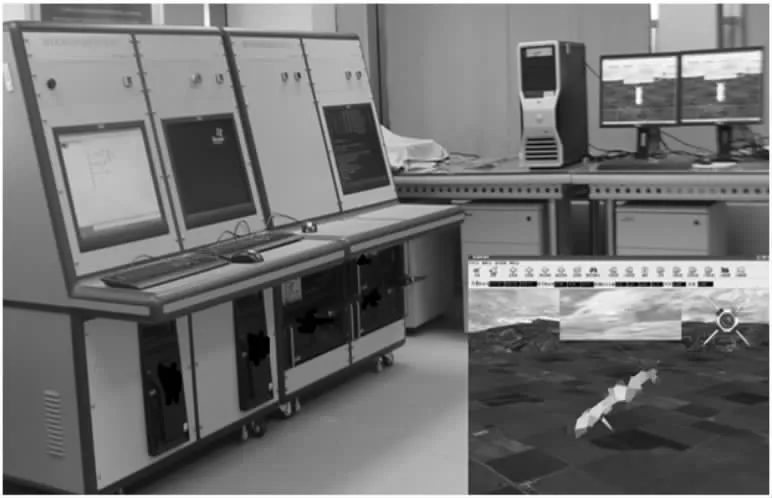
图6 直接力/气动力复合控制系统快速原型试验场景
4 结束语
直接力/气动力复合控制系统快速原型开发系统采用舵机真实422接口,结合视景仿真系统,方便快捷形象的调整控制对象模型和参数,首次实现了仿真步长小于1ms的实时仿真,完成了对控制系统数学模型及算法的优化设计和试验验证。
研究表明:由于该系统具有易操作、实时性和有效性显著特点,通过使用系统,研究人员可方便有效的缩短研制周期,大大减少研制、试验和测试费用,在提高空空导弹制导控制系统设计能力和研发效率方面具有重要的现实意义和应用前景。
[1] 李友年,王海波.气动力/直接力解耦控制方法[J].航空兵器,2004(3):24-29.
[2] 章惠君,郭雯雯.制导控制系统快速原型技术研究[J].弹箭与制导学报,2010,30(4):37 -40.
[3] 杨向忠,安锦文,崔文革.快速控制原型仿真技术应用[J].航天控制,2009,27(2):72 -80.
[4] 常晓飞,符文星,闫杰.RT-LAB在半实物仿真系统中的应用研究[J].测控技术,2008,27(10):75-78.
[5] 马慧敏,章惠君.导弹制导控制系统快速原型设计技术[J].电光与控制,2012(5):82 -85.
[6] 万士正,常晓飞,闫杰.基于RT-LAB的飞控系统快速原型开发[J].电子测量技术,2012,35(10):115 -122.
(责任编辑周江川)
