智能遥控新型高空救生缓降器设计
2013-02-18
(四川大学制造科学与工程学院机械制造及其自动化,四川 成都 6 10065)
高空救生缓降器是一种新型的安全逃生装置,在高楼发生火灾、地震等险情时,可以让人们沿着绳索从楼层外面直接安全地下降逃生,避开通过楼道、电梯逃生的种种安全隐患,让人们最大限度的保护自己并减少社会经济的损失。同时,它也可以协助消防部队扑灭火灾,减少消防官兵在救援现场的伤亡。
目前,国内外缓降器已有多种类型,主要基于电磁阻尼、液体阻尼、摩擦阻尼和手控等工作原理。多数产品结构复杂,体积大并存在不能快速、简单、自由调节下降速度的缺陷,使得人们在逃生过程中无法采取调速等有效措施应对下降过程中的各种突发情况。手控式缓降器虽能实现下降速度可调,但操作复杂,不适宜老人、小孩等特殊群体使用,同时大大影响了缓降器的快速往复使用。
通过详细科学的调查分析,针对目前缓降器产品存在的缺点,设计制作了一款基于摩擦块刹车原理的智能遥控新型高空救生缓降器。
1 总体结构和原理概述
缓降器的基本组成模块如下图1所示。在初始状态下,逃生者的自重作用在钢丝绳7上。钢丝绳防滑机构8将重力的直线运动转化为主轴9的转动并防止主轴和钢丝绳7的相对滑动。电机2预设夹紧力,在没有遥控输入信号,即电机2不工作的状态下,可以保证主轴9能够在重力作用下不转动。在逃生者开始下降时,转动的主轴9将离心块10向外甩出,转速越大离心力越大。刹车片11将离心块向外的离心力转化为刹车片与外壳6在圆周方向的摩擦力。当速度达到一定值时,摩擦力与重力达到平衡,此时主轴9就能保持该速度匀速转动,实现逃生者匀速下降。当需要调速时,逃生者使用遥控器4向单片机控制系统3发送无线遥控指令,包括开始、加速、减速和停止信号。单片机控制系统3接收到调速指令,调节输出到电机2的信号,从而控制电机的转动。螺旋推进块1把电机2的旋转运动转化为轴向移动,并利用杠杆机构放大螺旋推进块对摩擦块5的压力。在电机2的调节下,摩擦块5对刹车片11和离心块10的侧面产生一个附加的摩擦力,从而调节主轴9的转速,实现加速、减速和空中悬停。
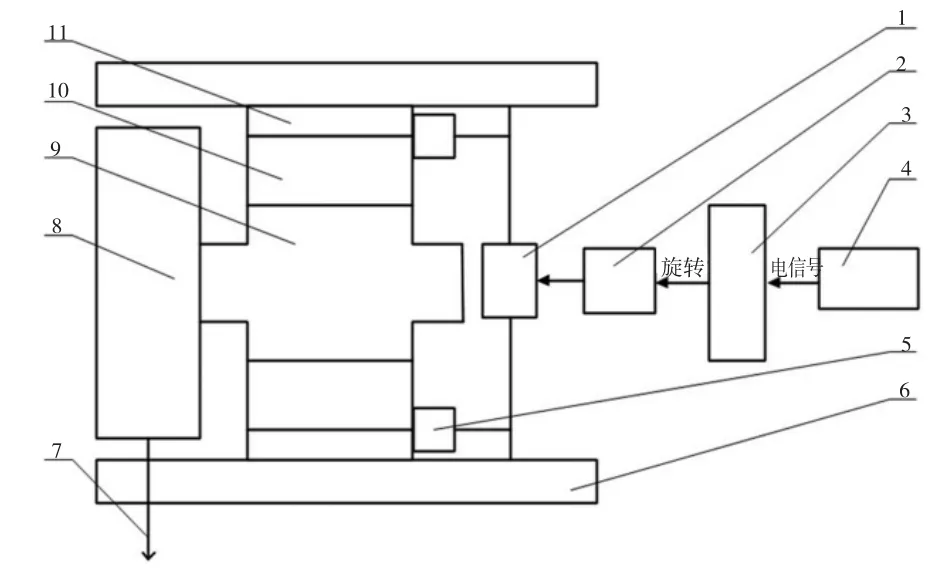
图1 基本组成模块
2 摩擦力减速机构
如图2所示,机构主要由钢丝绳夹紧机构、主轴、离心块、刹车片和外壳组成。它的主要功能是受负载的钢丝绳通过钢丝绳夹紧机构将人体重力按一定比例转化为主轴的驱动力,主轴旋转后将离心块和刹车片一起甩出,并与外壳产生摩擦力,从而产生与重力驱动相反的力矩使主轴减速。
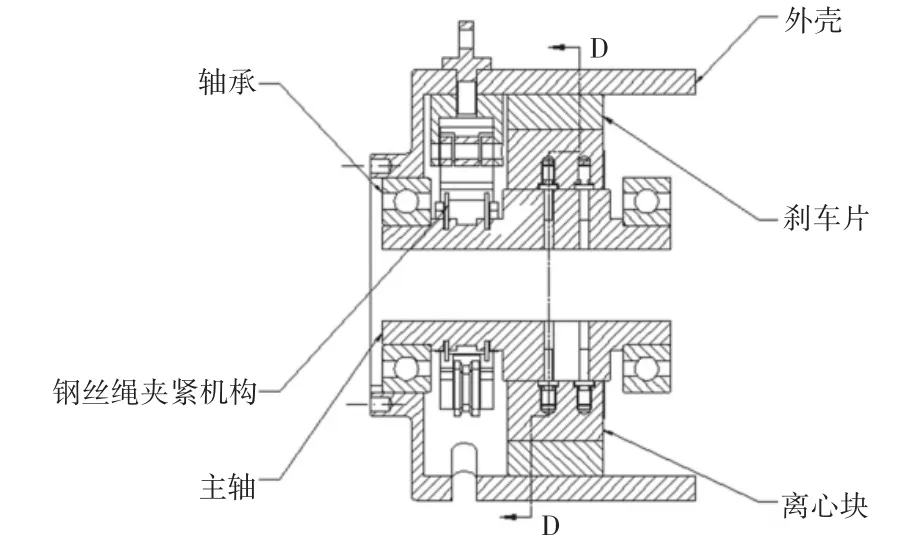
图2 摩擦力减速机构
(1)逃生者下降速度分析
离心块为四个相同的1/4环形柱组成的空心圆柱。

其中,R2=0.04 mm、R1=0.08 mm,分别为离心块的内外半径;h=0.0 4 mm,为离心块的厚度。离心块的材料为45#钢,密度为ρ=7.85 g/cm3,所以m=ρν=4.74 kg,则

式中,
N为离心块在刹车片上产生的摩擦阻力;
μ=0.35为刹车片与离心块的摩擦系数;
ω1为离心块的角速度。
(2)当缓降器匀速运动时

由(1)、(2)、(3)式得

其中,ν为逃生者下降速度。分别取小孩质量=30 kg,成人质量=100 kg,代入(5)得:

通过以上计算可得,人体质量取最大100 kg时,下降速度为1.213 m/s,在国家规定的缓降器逃生速度安全范围1.5 m/s内,故该设计满足要求。
3 辅助摩擦减速机构
辅助摩擦机构的主要功能是在电机接受到控制器传来的信号开始工作后,将电机的旋转力矩通过螺纹旋转化为轴向的推进力,再通过一个杠杆将轴向力放大后作用于刹车片上,提供一个辅助摩擦力。其结构如图3所示。
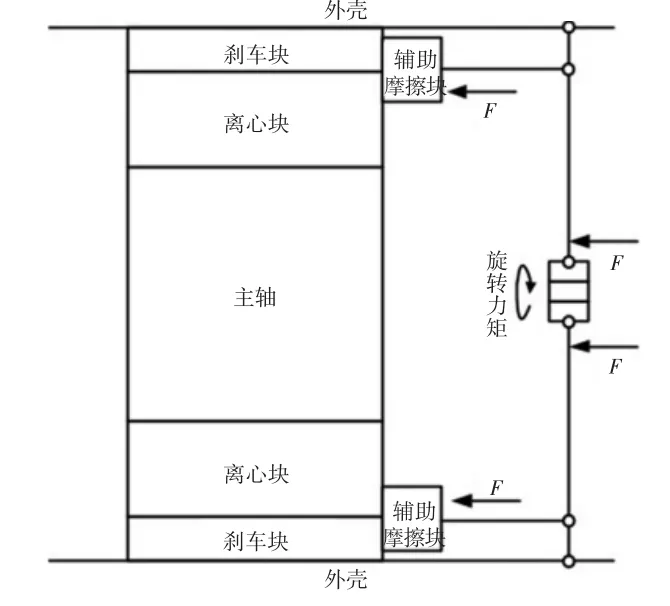
图3 电机控制减速机构
选用直流减速电机,额定电压U=6 V,额定转矩T=1.2 N·m。螺旋推进块通过螺纹旋转将电机的扭矩T转化为水平方向的推力F。

其中,k=0.2,为扭转系数;D=6 mm,为螺栓公称直径。
辅助摩擦块对刹车片产生的压力:

其中,n=8.5,为杠杆给轴向力的放大倍数。
辅助摩擦力产生的阻力矩为:

其中,μ=0.2,为摩擦系数,R=70 mm,为摩擦力矩。
由式(6)、(7)、(8)可得,M=119 N·m。
而100 kg的人对主轴产生的力矩为:

其中r=25 mm为钢丝绳处主轴的半径。因为M>M1,所以辅助摩擦减速机构能使人在半空中停下,满足设计要求。
4 控制器设计
4.1 控制器主要功能
遥控器发送命令,控制中心进行接收和处理,通过控制输出电流的方向来调节电机的正传和反转,从而控制辅助摩擦块对刹车片和离心块的摩擦力大小,实现加速、减速和空中悬停。
4.2 控制器工作原理
图4为整个控制系统的流程图。在下降过程中,通过人体本身的重力驱动缓降器主轴转动,主轴转动后将主轴上的离心块向外甩出并对外壳产生摩擦力,当下降速度达到0~1.5 m/s中的某个值时,摩擦力产生的阻力矩刚好与人体重力产生的驱动力矩达到平衡,这时逃生者就能按照该速度匀速下降。逃生人员感觉下降速度太快或者太慢时,可以按遥控调速器的按键发送加速、减速和停止命令给控制中心,控制中心接收到命令后,驱动电机正传或者反转,再通过杠杆将电机的驱动力放大后推动辅助摩擦块给刹车片施加压力,当电机正传时,辅助摩擦力增大,下降速度减小;当电机反转时辅助摩擦力减小,下降速度增大,从而实现对下降速度的智能控制。
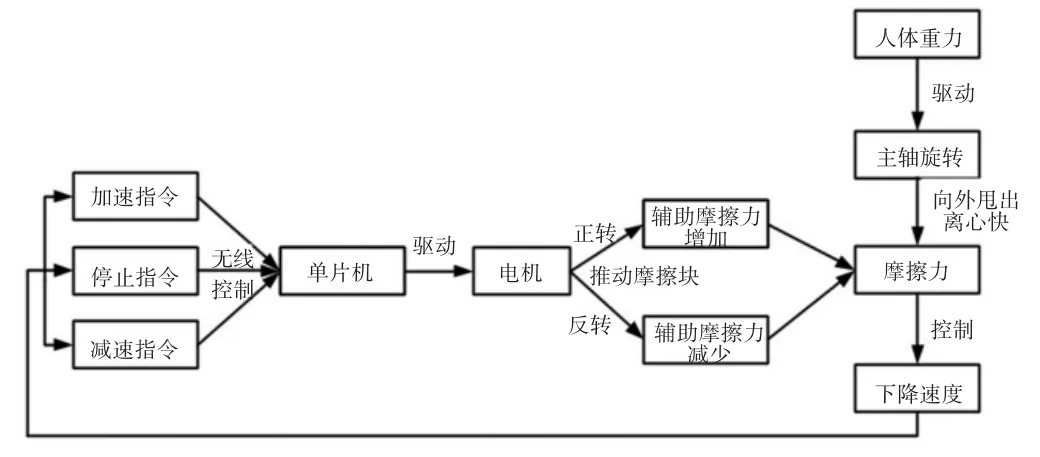
图4 控制系统流程图
5 第一代产品实验测试情况
为了验证产品性能,进行了第一代产品的样机制作和实验测试,得到实验数据如下表1所列。
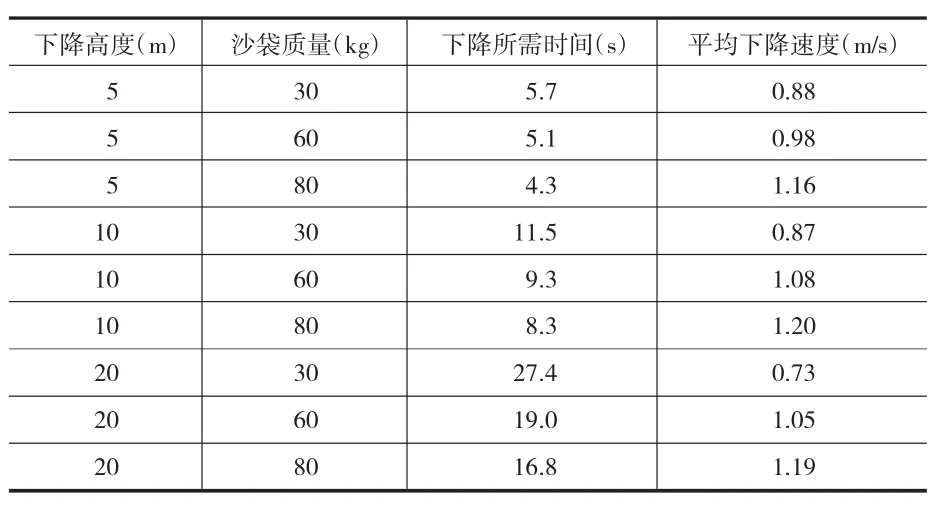
表1 第一代产品性能测试
分析表1结果可知,使用该样机可将沙袋的下降速度控制在0.6~1.5 m/s的安全范围内,同时通过调节遥控器可实现沙袋下降过程中的加速、减速和空中悬停。样机满足指标要求。
6 结束语
此款缓降器采用传统机械结构和单片机智能控制系统结合的方式,实现逃生者根据现场实际情况的需要自由调节下降速度的功能。它结构紧凑,体积小,质量轻,安全可靠,可反复使用,可广泛用于公众场所,如:高层写字楼、机关办公楼、学校的集体宿舍、高层大型商场、医院病房、三楼以上的宾馆等。当高层建筑灾难发生时,它能为人们快速逃离灾难现场争取宝贵的时间,挽救更多宝贵的生命,减少社会经济的损失。这些优点都决定它将会有非常好的市场前景,目前该产品已获得四川省科技创新苗子工程的项目经费资助。
[1]叶 强.液体流动阻尼式高楼逃生器的创新设计[J].消防科学与技术,2005,03(4):210-212.
[2]陈品志,等.基于直流发电机和电磁制动器的新型高楼逃生缓降器[J].制造业自动化,2010,10(下):173-175.
[3]符 炜.机械创新设计构思方法[M].湖南:湖南科学技术出版社,2006.
[4]李丙伦,等.简易火灾逃生缓降器的设计与研究[J].科技资讯,2010,8:122.
[5]邹 平(译).机械设计实用机构与装置图册[M].北京:机械工业出版社,2007.
[6]王 杰.机械制造工程学[M].北京:北京邮电大学出版社,2004.
[7]成大先.机械设计手册联接与紧固[M].北京:化学工业出版社,2004.
[8]王志明,等.救生缓降器优化设计[J].机械设计与制作,2009,4:7-9.
