日本机器人最新专利摘要选编
2013-02-14
一、【发明名称】利用智能手机控制机器人的方法
【专利编号】JP 2013-183285 A
【公开日期】2013.9.12.
【申请人】土佐电子株式会社
本发明提出了一种利用智能手机对检修机器人或其他机器人进行远程遥控的方法,该方法具有安全性和可操作性。
本发明的基本控制方法是,在能够通过防火墙和互联网连接的机器人和智能手机中,分别安装互联网VPN 系统;操作人员通过互联网VPN 系统,利用智能手机在防火墙外访问机器人,透过防火墙控制机器人。
在人不能直接作业的危险环境下,操作人员可以采用该方法,利用智能手机远程控制机器人工作。
【选择附图】

二、【发明名称】移动机器人的控制方法
【专利编号】JP 2013-218541 A
【公开日期】2013.10.24.
【申请人】松下株式会社
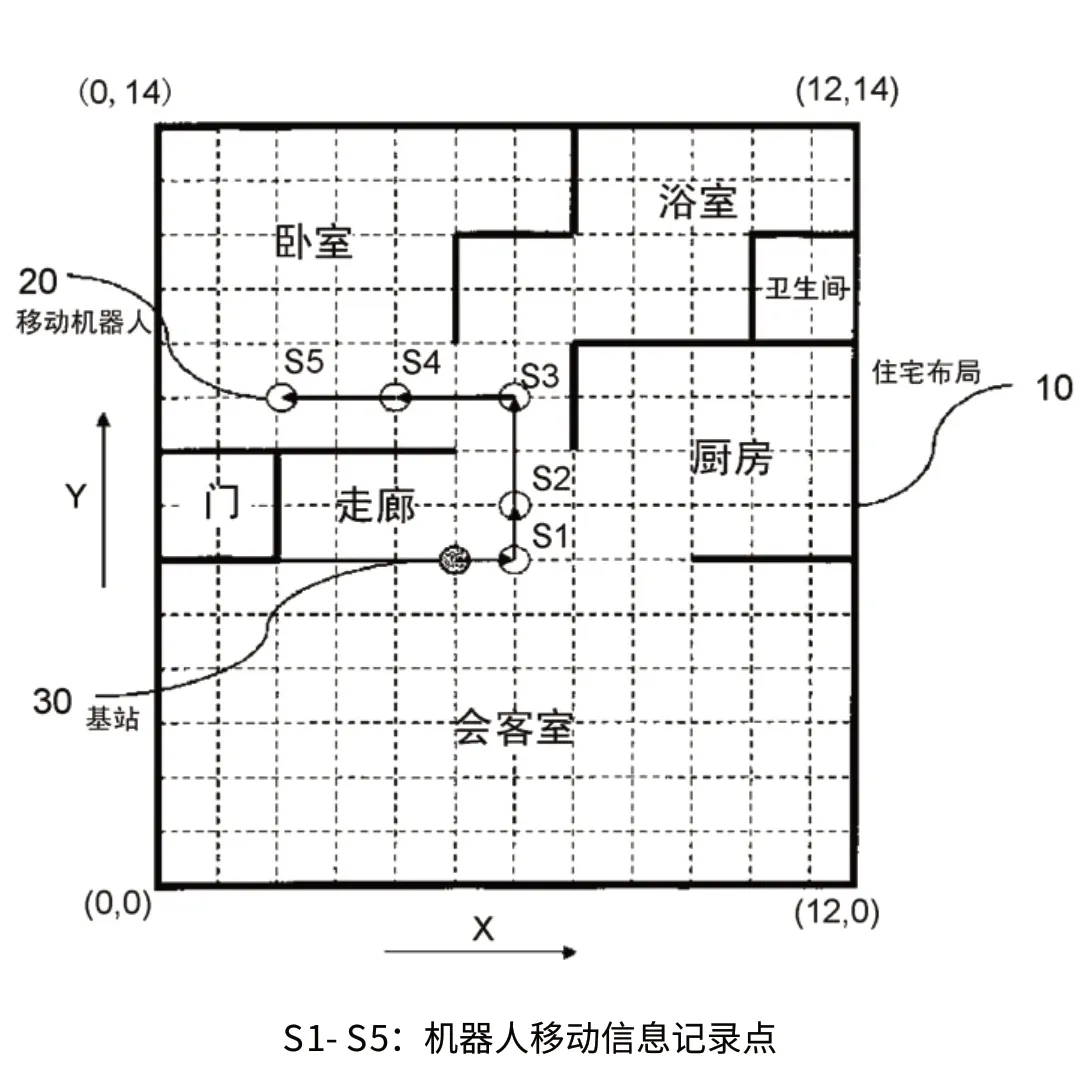
【摘要】本发明提供一种采用无线通信手段、使移动机器人很容易地回到所指定的基站等位置的控制方法。
在能够自主行走的移动机器人和对移动机器人进行控制的基站之间,通过无线通信传送信号,基站可以控制移动机器人的动作。移动机器人和基站均具有记忆装置,记录着移动机器人离开基站移动的轨迹。在某个位置上,当接收到的信号强度低于预先设定的阀值时,移动机器人根据记忆信息,使接收天线的指向成为能够接收到最大强度信号的方向,并基于记忆装置中记录的轨迹信息返回基站。
三、【发明名称】通用机器人机械手
【专利编号】JP 2013-220508 A
【公开日期】2013.10.28.
【申请人】IHI 株式会社
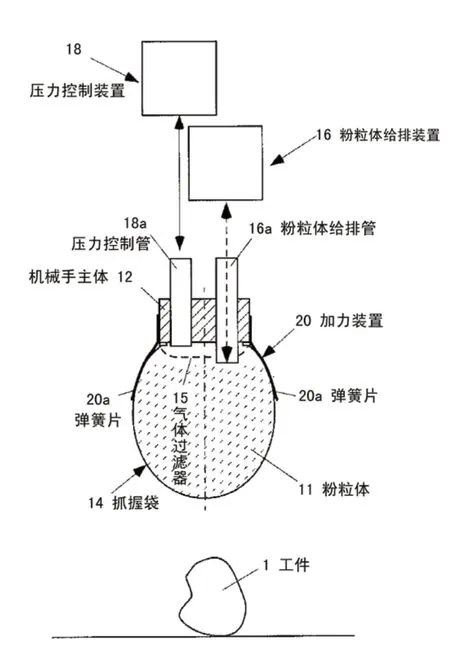
【摘要】本发明提供一种通用机器人机械手,该机械手能够抓握外表面不定型的工件,或利用工件上的孔穴或凹凸不平形状抓握工件。
本发明的通用机器人机械手由以下几个部件组成:
(1)相对工件1 能够移动的机械手主体12;
(2) 机械手本体12 面向工件一侧安装具有柔软性和气密性的中空抓握袋14;
(3)在机械手主体12 上设计有粉粒体给排装置16,该装置通过粉粒体给排管16a 能够向抓握袋14 内供给和排出粉粒体11;
(4)在机械手主体12 上设计有压力控制装置18,该装置能够给抓握袋14 内的气体减压或增压;
(5)安装在机械手主体12 外周面上的加力装置20,通过机械手主体12 向内侧的抓握袋14 加力。