Im proved color feature arrangement formean shift tracking❋
2013-02-08XiaoweiAnoungjoonHanHernsooHahn
Xiaowei An,Y oung joon Han,Hernsoo Hahn
(Dept.ofElectronicEngineering,SoongsilUniversity,Seoul 156-743,Korea)
Eq.(1)show s the measurement about Euclidean
While Wu(Pu(Zc),qu)<Wu(Pu(Qr),qu),the new position Zc is replaced by(Zc+Qr)/2,as shown in Eq.(5).
0 Introduction
Mean shift[1-3]theory is one efficient way for application of object tracking.Generally speaking,inside the entire tracking algorithm,mean shift computation cost is relatively low,which locates the object in each frame by means of color histogram difference betw een reference and candidate frame.
Continuousmean shif t,which uses iterative histogram procedure based on two sequential video clips,tracks the object in total video clips.Inside each iterative procedure,p revious frame's color or other feature statistic distribution is compared by current frame feature statistic distribution.A fter comparing the previous and current statistic distributions,new location position can be obtained by iterative convergence.
Numerous approaches for tracking objects have been proposed in the real environmentsurveillance.Mean shift algorithm has received lots of interest since itwas developed by Dorin et al[4].In their papers,the use of color histogram and kernel function reduced com putation cost efficiently and ef fectively.So the fo llow-up researches related tom ean shift have been brought to the forefront in recent years.In the past,mean shift trackers,most of them followed a traditional partition of feature space,especially for the color space.M ethods for mean shift tracking have been invented.Collins[5]made a param etric control kernelscale in the originalm ean shift tracking process.In order to reduce com putation cost,Gauss model transform was accepted by YANG et al[6].Spatial histogram has been im plem ented to obtain the spatial relationship of pixels[3,6].Scale space inform ation was added into the feature structure in the paper[5,6].ZHAO et al.made spatial in formation incorporated into object rep resentation,by using color correlogram as a feature[7].
color features are free of transform ation and rotation,which have attracted lots of attention from vision processing field.In the tracking object's process,color usually can be represented by pixel value histogram.H istogram is the best representation show ing a visual impression of the distribution of data.It is also a directestim ation of the color variables'probability distribution.
Mean shift tracker with object color inform ation is sim ple and convenient.It offers good per form ances in the real environment.Because of color's robustness for ob ject poses'variance and partial occlusion,app lication of color model histogram has been increasingly popular in the tracking field.Commonly,color m odel of the m eans shift tracker is represented by kernel-based p robability distribution andm easured by Bhattacharrya distance,which takes charge of statistics'distribution sim ilarity com parison[3,8].
In this paper,the utilization of distance clustering based on similar colors(color vectors)facilitates robustly optimal color substitutions.Those substitutions help the statistic distribution analysis from 3-D RGB spatial domain to 1-D histogram representation.Statistic iteration convergence is facilitated by reduced emp ty-bins procedures and original data substitutions namely,cluster indices.Closing color statistics'clustering of fers several advantages in the context of tracking process.
1)Itoffers new color data representation format:Optim al color vectors take the place of conventional RGB data.Obviously,histogram distribution is also rep laced by new substitutions that greatly simp lify the color statistics distribution.
2)Distance clustering is used tofind the closing group in the original data distribution.We em ploy a samp ling strategy according to the target Window capacity of each reference fram e.A fter color components clustering in the reference frame,fast voting m ap based on op tim al color is presented to efficiently remove the redundant empty bin modes.Euclidean mapping between cluster indices from reference frame to candidate f rame accelerates the construction of candidate fram e data distribution.
3)Computation cost is reduced by the lim ited bin numbers.The sim plified color clusters'distribution enables the real-tim e surveillance system.
1 Color feature arrangement in the conventionalmean shift tracking
Almost all themean shift tracking projects follow uniform probability arrangem ent when they construct the statistical histogram[9-13],as shown in Figs.1 and 2.
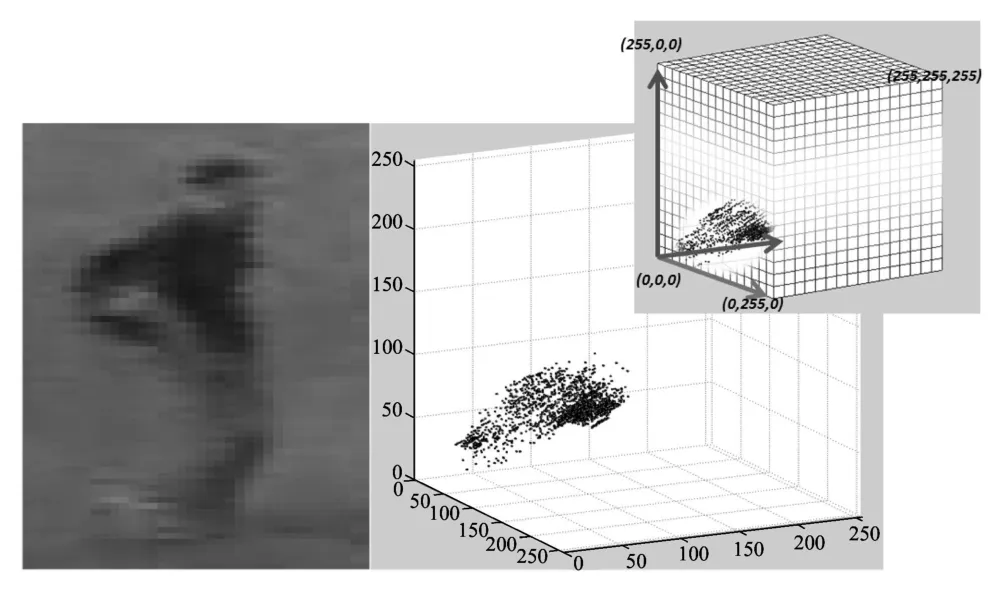
Fig.1 Color arrangement
Fig.2 gives the uniform histogram of the pixel.In this figure,the color space is divided by 5×5×5 bins.R,G and B axis is divided averagely by 5.One index of yellow sub-box is 24.This histogram construction ignores the immense relationship of the real useful data.Lots of boxes are empty which waste the limited valuable storage.As shown in Fig.3,lots of yellow boxes own nothing,but they still exist in the histogram space.
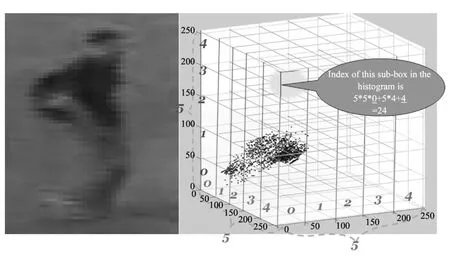
Fig.2 Conventional histogram of color arrangement
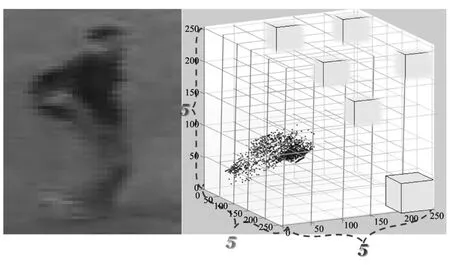
Fig.3 Redundant bins in conventional uniform histogram
2 Clustering color based mean shift algorithm for object tracking
2.1 Clustering colour arrangem ent
In order to reduce such yellow em pty binsand improve the rate of utilization.We use the clustering method to only focus on the useful pixel.As shown in Fig.4,several clusters are arranged into the original pixel vectors.
The procedures is shown in Fig.5.
Aswe known,one pixel in the original image has RGB-3 attributes,which can be projected into RGB vector space(see Fig.1).According to Euclidean distance gathering,we firstly select several initial centers random ly and then assign the rem aining data to their closest cluster center.A fter calculating a new cluster center for each cluster,we repeat it until the cluster centers do not change.distance betw een color vector pjand the cluster centroid y(j)i.
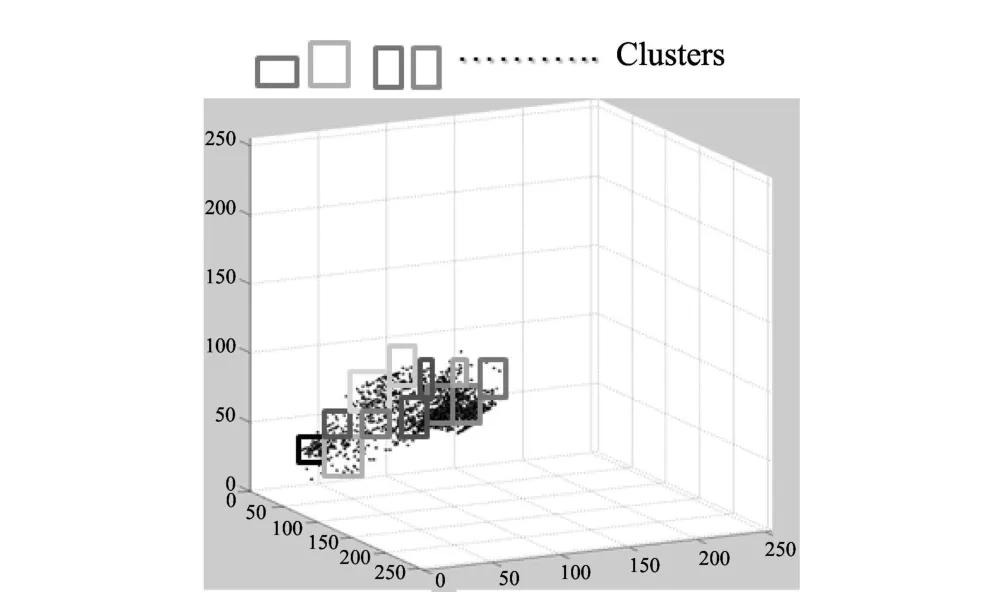
Fig.4 New clustering color arrangem ent

Fig.5 Pixel rearrangement procedures

Eq.(1)show s the measurement about Euclidean
When Eva gets the minimum in each cluster,the clustering stops.Meanwhile,each cluster's m ean value is calculated by

where Ciis the i-th cluster,miis them ean value of the i-th cluster.In our definition,m i is named by optimal color vector(OPC)and which can be indexed by value.
2.2 Mean shift based on cluster color arrangem ent
Mean shift p rocess based on OPC facilitates the histogram construction.New color substitution,OPC,not only rep resents the limited kinds of color but also owns the influence from the optimal color neighborhood.
Our representation about optimal color model gives a cunningm echanism to organize the color statistics distribution.In the mean shift process,color distribution of the reference im age interest area(RIA)is able to be transformed into histogram of OPC modes.We only arrange the histogram about OPC,so th at we can control the total in fom ation about the w hole color distribution of RIA.Statistic density is described in the RIA as histogram of OPC.For the same reason,the candidate interest area(CIA)is also able to be described by histogram of OPC,as shown in Fig.6.
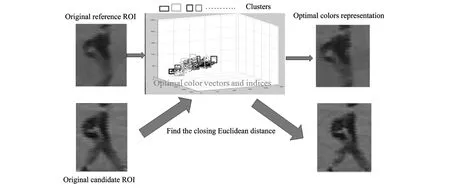
Fig.6 R IA and CIA p rojection results
To obtain OPC in RIA and CIA,we initialize a target location in the reference frame as Pr(xr,yr),and make a target rectangular Window Wraccording to the initial location Pr.Window size is ih×iw.Then we cluster the color vectors in Wr and obtain OPC.Now a group of OPCs substitute original Wrdensity attributes.H istogram of each OPC also can be obtained easily.
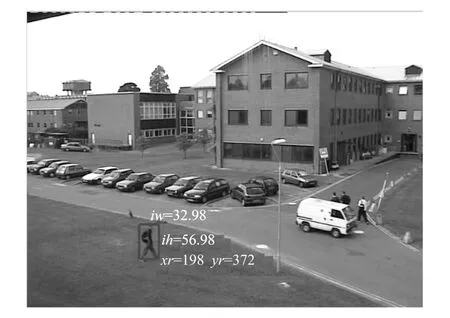
Fig.7 Select initial position in RIA
The probabilityp of OPC u in Wr is
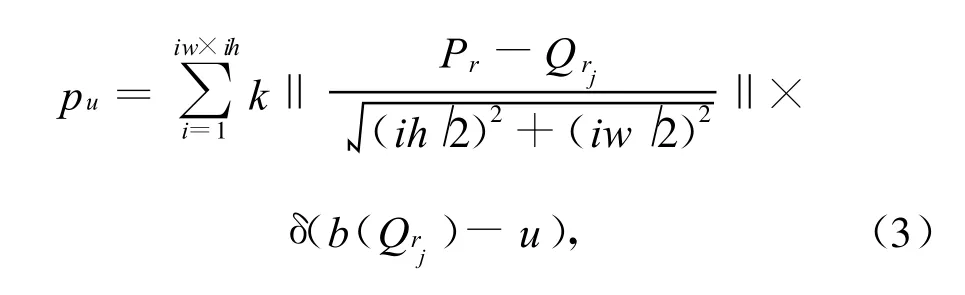
where Qrj(j=1,…,iw ×ii)denotes pixel(color vector)locations of target centered at Pr;b(Qrj)denotes the OPC bin of the u;k denotes the kernel function.
For CIA frame:
1)Extract the same size Wrfrom the same position Prin the candidate fram e.The pixels(color vectors)from the candidate interest area(CIA)can be mapped by Eq.(1).
The probability quof OPC u in CIA can be obtained by Eq.(3).
2)The matching OPC of u in RIA and CIA can be com pared by
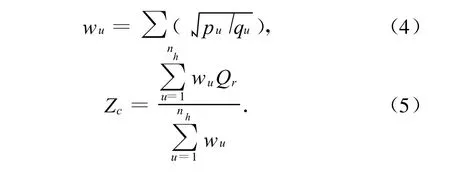
While Wu(Pu(Zc),qu)<Wu(Pu(Qr),qu),the new position Zc is replaced by(Zc+Qr)/2,as shown in Eq.(5).
3 Experiment
In our experim ents,we m anually select a target ob ject at the initial f rame(reference f rame)and model it using the proposed OPC histogram model.The experimental results are shown in Figs.8-11.
The program is w ritten in MFC environment on a com puter with 2.8-GHz Intel Pentium(R)CPU and 2.0-GBm emory.Tracking time cost is p resented in Table 1.

Fig.8 Tracking Man_passage resu lt (400 frames,size:640×480)using the proposed algorithm
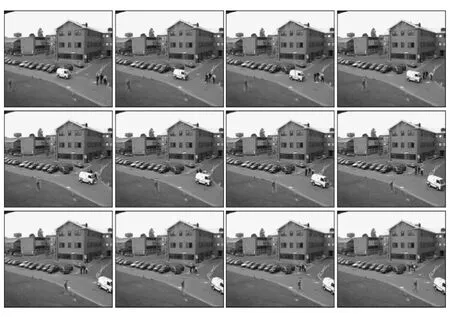
Fig.9 Tracking Pedestrian_1 resu lt(240 frames,size:640×480)using the proposed algorithm
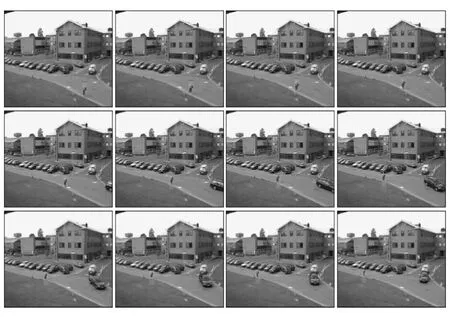
Fig.10 Tracking Pedestrian_2 result(250 fram es,size:640×480)using the proposed algorithm

Fig.11 Tracking girl_fussy result (280 fram es,size:640×480)using the proposed algorithm
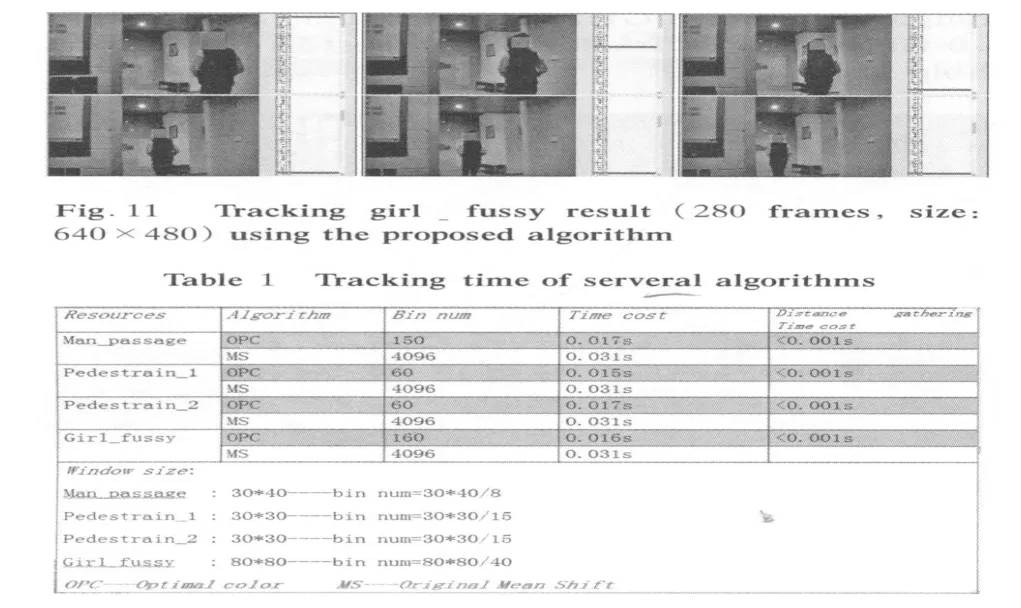
Table 1 Tracking tim eof servera l algorithms
4 Conclusion
In this paper,we present an optim al color m odel method for tracking objects.Superior per formance of the distance clustering and bin index m echanism is demonstrated on several exam ples.A fter the distance clustering,the construction of optim al color model can reduce the com putation cost efficiently.Currently,w e are Working on adaptive Window algorithm w hich can locate the target position m ore accurately under more com plex environments.Bin classification w ill be further im proved.
[1]Kam W W.Machine vision,robot vision,com puter close-range photogrammetry,1992.
[2]Y ilmaz A,Javed O,Shah M.Ob ject tracking:a survey.ACM Computing Surveys,2006,38(4):13-57.
[3]Odobez JM,Gatica-Perez D,Ba SO.Embeddingmotion in model-based stochastic tracking.IEEE Transactions on Imaging Processing,2006,15(11):3514-3530.
[4]Dorin C,Meer P.Mean shift:a robust app roach toward feature space analysis.IEEE Transactions on Pattern Analysis and Machine Intelligence,2002,24(5):603-619.
[5]Collins R T.Mean-shift blob tracking through scale space.In:proceedings of IEEE Conference on Computer Vision and Pattern Recognition,2003:234-241.
[6]Yang C,Duraiswam i R,Davis L.Efficient mean-shif t tracking via a new sim ilaritymeasure.In:proceedings of IEEE Conference on Computer Vision and Pattern Recognition,2005:176-183.
[7]ZHAO Qi,TAO H ai.Ob jec t tracking using color correlogram.In:Proceedings of 2nd Jonit IEEE International Workshop on V isual Surveillance Performance Evaluation of Tracking and Surveillance,2005:263-270.
[8]Isard M,Blake A.Contour tracking by stochastic p ropagation of conditional density,In:proceedings of European Conference on Computer Vision,Cambridge,U.K,1996:343-356.
[9]Isard M,Blake A.Condensation—conditional density propagation for visual tracking.International Journal of Com puter Vision,1998.
[10]YAO An-bang,LIN X ing-gang,WANG Gui-jin.A compact association of particle filtering and kernel based ob ject tracking.Pattern Recognition,2012,45(7):2584-2597.
[11]CHEN Qiang,SUN Quan-sen Sun,Heng P A,et al.Two-stage ob jec t tracking method based on kernel and active contour.IEEE Transactions on Circuits and Systems for V ideo Technology,2010,20(4):605-609.
[12]FANG Jiang-xiong,YANG Jie,LIU Hua-xiang.Efficient and robust fragments-based mu ltiple kernels tracking.International Journal of Elec tronics and Communications,2011,65(11):915-923.
[13]ZHANG Xu-guang,LIU Hong-hai,LI X iao-li.Target tracking for mobile robot p latforms via objectm atching and background anti-matching.Robotics and Autonomous Systems,2010,58(11):1197-1206.
