精准变量施肥技术研究与应用
2013-01-24杨志杰
杨志杰
河北省农业机械化研究所有限公司 050051
1 引言
精准施肥技术是把地块细化成操作单元,根据不同土壤类型、土壤中各种养分的盈亏状况、不同肥料的增产效应、不同作物的施肥模式、历年产量等相关信息输入计算机,形成资料齐全的土壤养分信息化管理系统,生成作物生长的变量处方图,这些信息输入变量施肥机的控制单元,根据处方图信息在田间不断改变施肥量,完成施肥作业。从国内外的研究来看,按处方图变量施肥地块的产量比传统平衡施肥的产量将提高30%左右,而且减少了化肥施用总量,经济效益大大提高。要做到精准施肥,就要求有科学合理的施肥方式和具有自动控制的变量施肥机械。
1993-1994年,精准施肥技术首先在美国明尼苏达州的两个农场进行试验,1995年美国明尼苏达州、华盛顿州开发了变量施肥技术(VRT-Variable Rate Technology)应用设备,随后变量施肥机械在欧美得到迅速发展,其中发展最快的就是圆盘式变量施肥机,美国的SWENSON及德国的AMAZON等公司都进行了大量的研究,中国近年来也开始着手研究,但是我国变量施肥机械研制还处于起步阶段。
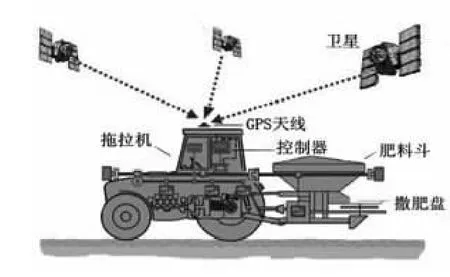
图1 圆盘式变量施肥机
2 变量施肥关键技术
变量施肥机(如图1)主要由行走系统、全球定位系统(GPS)、控制系统、圆盘式(或其它形式)撒肥装置等组成。
2.1 圆盘式变量施肥机采用GPS(全球卫星定位系统)用于信息获取和实施准确定位
变量施肥机需要GPS为其提供准确的定位信息,GPS接收机通过通信端口、通过传输协议向计算机控制系统传输定位、速度、时间等数据,控制系统进行分析后,使得到变量施肥机能够按照处方图的施肥计划精确施肥,从而使得变量施肥得以实现。
DGPS(差分定位技术)是保证变量施肥机施肥精度的一项重要技术。美国政府为了控制和限制G P S用户的使用,实施了安全管理(SA)政策,使卫星钟差和星历误差显著增加,定位精度有所下降。对于精确农业上的变量施肥机而言,15米以上的定位精度不可能接受的。DGPS是在一个已知点上设立基准站,跟踪观测GPS卫星,测定各卫星伪距观测值的修正值;通过差分数据传输系统,实时发送给行走中的施肥机,经差分修正后,进行定位解析,使变量施肥机获得亚米级,甚至更精确的定位信息。
2.2 GIS(地理信息系统)的技术支持
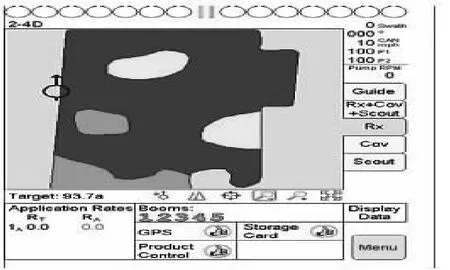
图2 处方图信息
GIS是构成农作物精确管理空间信息数据库的有力工具,田间信息通过地理信息系统予以表达和处理,具体步骤为:从田间采集代表性土样,最常见的取样方式是栅格取样法,地块被分割成面积相等的栅格,从每一栅格中采集一个土样,在实验室进行土样分析;利用分析结果,绘制土壤养分空间分布图,即施肥处方图(如图2);最后依据施肥处方作业图,决定肥料的最佳施用量。施肥处方图中既包含了每个田间栅格的施肥量信息,也包含了每个栅格的地理位置信息,这些信息经专业软件处理后,可以输入到变量施肥机控制器中,成为变量施肥机的施肥依据。
2.3 控制系统是变量施肥机核心
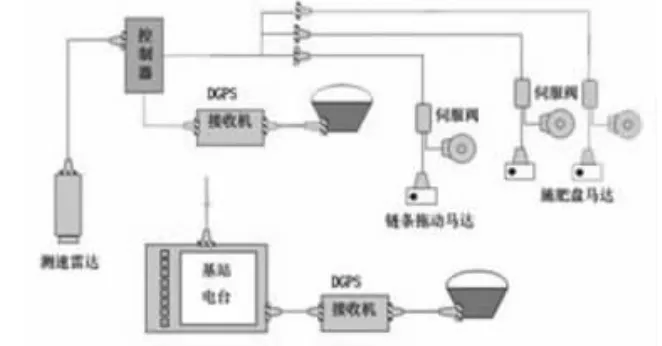
图3 变量控制系统组成
变量施肥作业的另一重要组成部分是其控制系统(如图3),它集成了施肥处方图信息、GPS信息和与不同输入对应操作。在控制系统中,可集成许多功能模块,如变量施肥模块和变量喷药模块等。控制系统包括软件系统和硬件两大部分,软件系统类似计算机的操作系统,是应用部分,它的一个很重要的功能是是对预输入的施肥处方图进行解析和执行,把接收到G P S定位信息与施肥处方图的地块位置信息进行核对后,准确完成施肥作业。同时它还可以创建和储存地块的边界,标记机械行驶路上的特殊点如树木等,并可以分析边界计算土地的面积。并对变量施肥机上的各个执行部件进行监控和反馈,如拖拉机的行驶速度、链条马达和施肥盘马达的转速,通过传感器进行数据采集,通过控制节点,传输到控制中心,经分析后,再把控制信息反馈到施肥执行部件。
2.4 液压系统和施肥装置的可靠性
目前国内外的变量施肥机多采用液压马达作为撒肥盘的动力来源,由油箱、油泵、各种控制阀、管路、马达组成的液压系统,由控制系统实现对流量阀、压力阀和方向阀的控制,来完成变量施肥作业。液压系统比较复杂,各种控制阀属于精密元件,如果制造工艺达不到要求,很难实现精确控制,同时也很难保证变量施肥作业的可靠性。
3 圆盘式变量施肥机理论分析与田间实验评估
3.1 圆盘式施肥机理论分析
在设计圆盘式施肥机之前,建立实验平台,通过实验对相关的机械参数和肥料特性做基础试验,对进料口位置、进料口大小、叶片倾角圆盘转速、圆盘大小、肥料特性设计实验方案,分析其对施肥效果的影响。对以上各因素进行分析和组合实验,衡量施肥机施肥均匀性,并通过对单圆盘施肥数据的分析,做出圆盘施肥作业模型,实验后的数据作为设计变量施肥机的依据。
3.2 变量施肥一致性实验
由于圆盘式施肥机是靠离心力把肥料抛出去,这个固有的缺陷使其在田间肥料的分布成一个心形,中间多,而边缘少(如图4)。
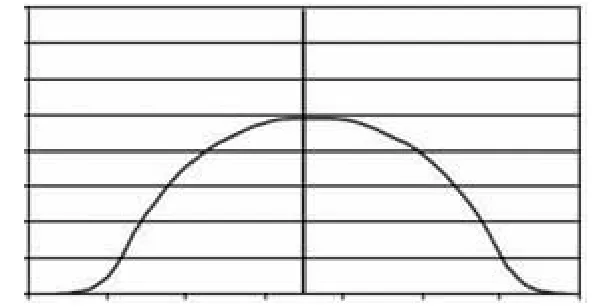
图4 肥料分布图
因此施肥机的单次作业很难达到施肥均匀性要求。只有在变量施肥机各项参数校正后,经过往复施肥的叠加作业,才能提高其施肥一致性(如图5)。
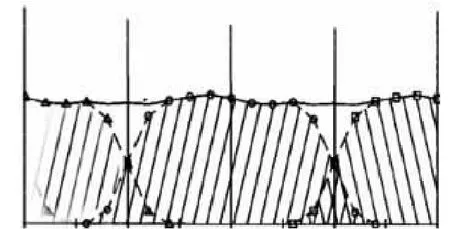
图5 叠加肥料分布图
3.3 变异系数
圆盘式变量施肥机单行作业中撒下的化肥沿纵向与横向的分布是不均匀的,因此需要进行大量的田间实验,借此评估施肥机的作业质量,改善肥料分布均匀性,其判定指标就是变异系数(coefficient of variation),简称 CV。
变异系数的计算公式如下:
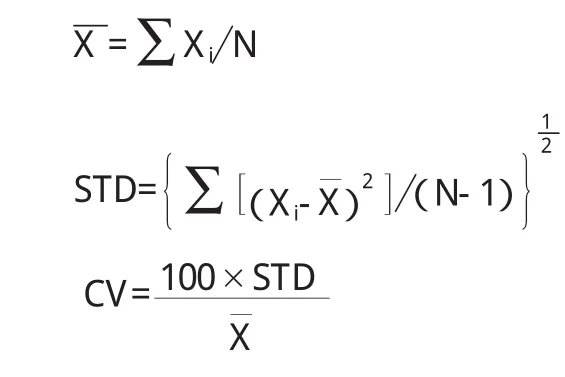
其中,Xi为重叠施肥试验的每一个收集点上积累的肥料重量;N为收集肥料的试验点的数量。为施肥平均值,kg/ha;STD为横向施肥幅宽方向的标准偏差;C V为变异系数。
若施肥机的变异系数越小,其横向幅宽上施肥的一致性程度就越高;反之,变异系数越大,则其横向幅宽上施肥的一致性程度就越差。由于田间施肥的地形的平坦性对CV有一定的影响,很容易使两个施肥轨迹中有可能施肥量多的两点相叠加,或是两个施肥量低的点相叠加,这样就会使CV发生很大的变化。因此不同的地形对于施肥机的要求也不相同。虽然圆盘式施肥机的CV要求在5%-10%之间,但对于一般的田间施肥,CV在15%-20%之间也是可行的。
3.4 田间实验评估
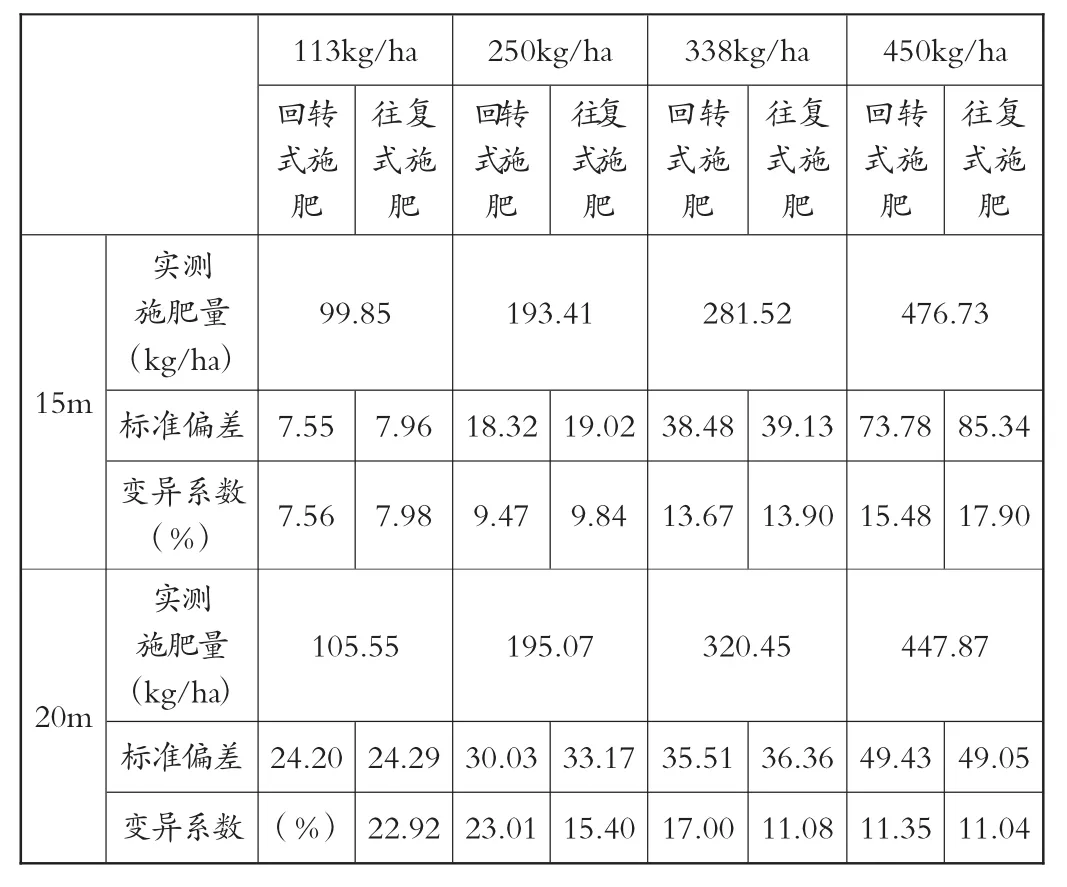
表1 两种幅宽下四种不同施肥量的性能参数表
在田间实验中,施肥机在设计要求的15 m和20 m幅宽,通过重叠作业面积来改善其均匀性,采用四种常用的施肥量,在回转式和往复式两种施肥试下,试验所得数据(表1)。不同施肥幅宽,不同的施肥量和不同的施肥方式,都会给圆盘式施肥机的变量作业带来一定的影响,因此为了达到变量施肥的最终目的,应在施肥范围内进行大量田间试验,使其变异系数在变量施肥的要求范围之内,提高施肥一致性,以保证施肥机的作业质量。
4 结论
实践表明精准农业,特别是变量施肥技术的应用,真正实现了对土地的按需管理,节省了农业投入,促进了环保,实现了农业生产的可持续发展。变量施肥机不仅在规模种植的地区具有广阔的应用前景,如果进一步开发适合小地块作业、符合我国国情小型的变量施肥机将会实现种植业的另一次飞跃。
[1]汪懋华.“精细农业”发展与工程技术创新[J].农业工程学报,1999,15(1):1-8.