超磁致伸缩执行器温控系统的设计与实现①
2012-12-26隋晓梅陈文卓
隋晓梅 陈文卓
(华北科技学院电子信息工程学院,北京东燕郊 101601)
超磁致伸缩执行器温控系统的设计与实现①
隋晓梅②陈文卓
(华北科技学院电子信息工程学院,北京东燕郊 101601)
为了实现超磁致伸缩执行器(GMA)精密的位移控制,需要采取一定温控设施保证超磁致伸缩材料(GMM)工作在特定温度情况下;针对超磁致伸缩材料对温度的敏感性,在GMM智能构件的基础上提出了一种改进的强制水冷温度控制策略;利用单片机控制系统实现了对超磁致伸缩执行器的温度控制,实验结果表明了该控制策略可以保证GMA工作在恒温,验证了策略的有效性;对超磁致伸缩材料微驱动应用具有实际的工程意义。
超磁致伸缩;温度控制;单片机
0 引言
超磁致伸缩执行器(Giang Magnetostrictive Actuator,GMA)在需要精密定位、位移伺服的控制领域中有着广泛的应用,主要利用超磁致伸缩材料(Giant magnetostrictive material,GMM)在外界磁场作用下会发生应变伸长这一特性。GMM作为一种新型的能量转换功能材料,具有应变大、强力、机电耦合系数高、响应速度快等优异特性,但其热膨胀系数[1]达12×10-6/℃,由于这一系数与磁致伸缩系数在同一个数量级[2],因此使用过程中产生的热将直接影响GMA定位和位移控制精度,所以有效抑制热误差是应用超磁致伸缩执行器实现精密加工或精确定位、位移伺服控制的关键技术之一。目前,抑制GMA热变形的方法主要有被动补偿和主动温控两大类。被动补偿执行机构往往比较复杂,无法从根本上消除GMA产生的热误差。主动温控方法包括:半导体制冷法[3]、相变温控法[4]、强制水冷温控法[5]。其中半导体制冷法需要专门定制半导体制冷片,且结构较复杂;相变温控法则需要通过复杂的相变材料选型来进行配比过程;至于传统的强制水冷温控法[5],则需要根据GMA温度的变化,调节水泵流量的方法来实现对GMA温度的控制,整个控制过程复杂。因此本文基于GMM智能构件[6,7]提出了一种改进的强制水冷温度控制策略,根据GMM智能构件驱动线圈所能产生的最大生热量,给出水泵的最低流量,从而保证带走GMM智能构件驱动线圈产生的热量,主要利用单片机系统结合测温电路、加热控制电路和风扇电路来实现超磁致伸缩执行器的温度控制策略。通过实验,结果表明该策略可以有效地保持GMM工作温度的恒定。
1 超磁致伸缩执行器温控系统的设计
针对传统超磁致伸缩执行器温控方法的不足,且考虑到实际过程中GMM智能构件[6,7]系统需要长时间连续工作,为了达到良好的控制效果就必须快速降低超磁致伸缩材料在使用过程中产生的温升,同时保证GMM工作温度的恒定。综合以上主要因素提出了一种改进的温控策略,它根据GMM智能构件驱动线圈工作过程中最大生热量,设定水泵的最低流量将GMA驱动线圈产生的热量带走。相比于传统强制水冷温控策略[5],这种改进的温度控制策略不需要根据GMA实时的温度变化来控制水泵,做出相应变化流量。不但简化了温度控制算法,而且减小了由于流量变化所造成的降温滞后,提高了整体控制系统的工作效率,使GMM能稳定在一个更小的温度波动范围内。经过对GMM智能构件工作环境的反复测试,得到冷却水流速最低为0.0464 m/s。
GMA温控系统的整体结构如图1。整个控制系统首先需要设定恒温水的预设温度值,GMA开始工作后,水箱中的温度传感器将监测得到的水温通过测温电路连接至单片机温控系统,单片机将此温度值与初始的设置值进行比较,如果水温低于设定值则通过单片机温控系统启动加热控制电路,从而使加热器开始工作,温度将不断升高。经过一段时间后当水箱中的温度达到并能够稳定在设定值时,则通过单片机温度控制系统启动水泵进行工作。水泵将水送至GMA,恒温水流过驱动线圈后通过阀回流到水箱,由于吸收了驱动线圈的热量所以水温会有所升高,一旦温度值高于设定值,则单片机温控系统启动风扇控制电路,从而使冷却风扇开始进行冷却。
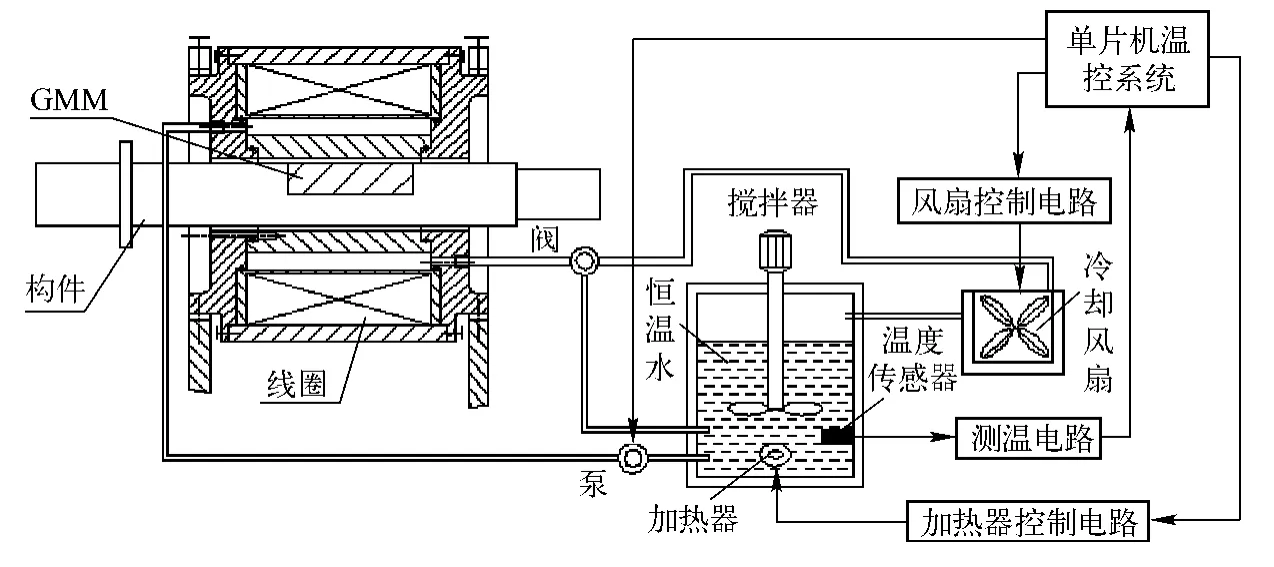
图1 强制水冷的GMA温控系统结构图
2 超磁致伸缩执行器温控系统的实现
超磁致伸缩执行器温控系统的主要任务是针对温度控制目标,控制系统执行相对应的动作,从而控制GMM工作温度在合理范围内,减小由于温度升高对于应变伸长所造成的影响。
控制系统原理如图2所示。首先水箱中循环水温度经单总线温度传感器采集后直接送入单片机AT89C55,单片机接收温度传感器送来的信息后,对水温与预设温度进行比较,然后通过AT89C55分别控制可控硅及继电器,从而决定循环水加热器的功率输出以及冷却控制电路中风扇的工作状态。GMA执行器内的线圈温度由Pt100采集,经过A/D转换芯片采用双积分型模数转换器ICL7135将线圈温度转换为数字信号送入AT89C55,单片机控制水泵控制电路工作,向GMA智能构件提供冷却循环水。
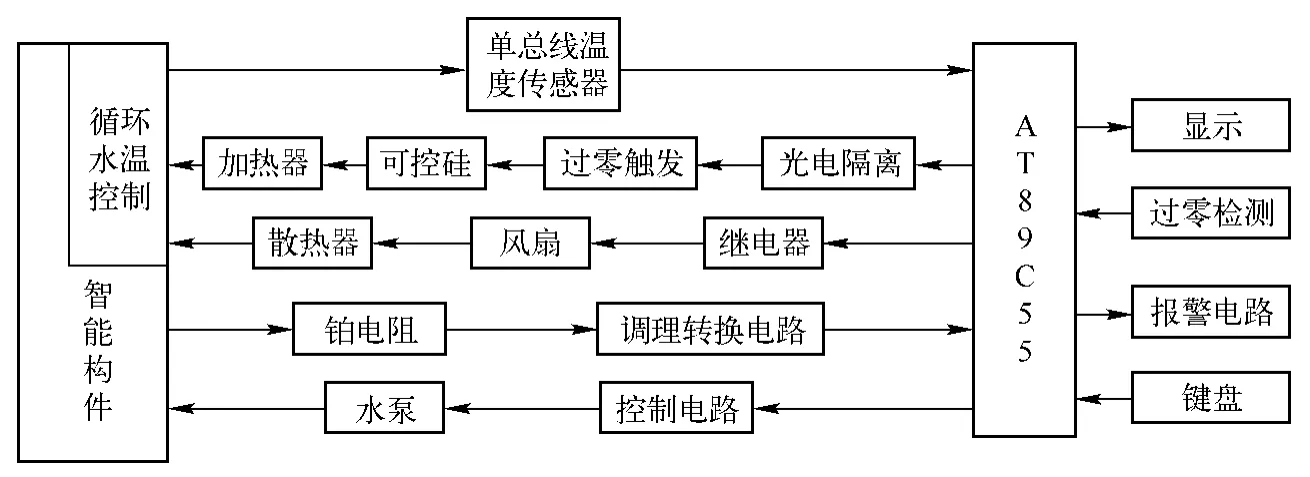
图2 控制系统原理图
控制系统中控制器的核心是ATMEL的AT89C55型单片机,主要负责温度的比较和执行相应控制电路动作的触发,多路开关和放大器采用模拟多路开关CD4052和高精度集成运放OP07。A/D转换芯片采用双积分型模数转换器ICL7135,外部扩展一片串行256×8位的E2PROM芯片AT24C02;D/A转换则采用DAC0832芯片实现功率驱动输出、、过零触发功率输出以及触点继电器输出。
系统中分别采用两种温度传感器DS18B20和Pt100。DS18B20为数字式温度传感器,其在-10℃~80℃的绝对精度为0.5℃,用于对检测精度要求相对较低的水箱中的水温。而对于GMA应用领域对于精度要求相对更高,所以在这里Pt100用于测线圈温度。Pt100主要利用铂的电导率随温度变化的特性,其复现性好,但尽管Pt100大体上线性度不错,使用之前仍需要进行标定,本方案中选用数值式温度表对铂电阻温度传感器标定,标定的四次多项式拟合曲线如图3所示。
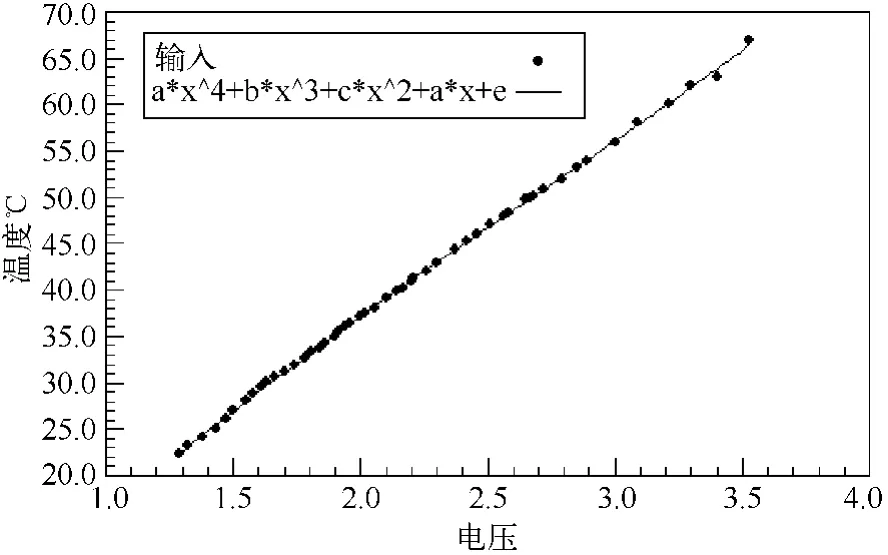
图3 温度传感器的标定
最后经Pt100的检测和数据采集卡的采集,将测得的GMM智能构件的温度数据送给计算机,绘制出工作状态下温度曲线。
3 实验结果
为验证超磁致伸缩执行器温度控制策略的有效性,对设计的GMA温控系统进行实验测试。在环境温度为20℃,使用30℃冷却水对GMM构件进行冷却,Pt100测试位置为水腔靠近GMM棒内壁处,冷却水流速0.0464m/s。实验主要测试改进的温控系统是否对于GMM智能构件产生的不同热量均能有效控制温度,并稳定在一个小的波动范围内,选取三种情况进行测试。GMA输入电流分别为0.5A、2A、3A,对GMM智能构件的线圈经过10分钟水冷却后,使用温度传感器和数据采集卡,连续采集温度数据1个小时,采样率为1秒钟一次,据此绘制温度-时间变化曲线如图4所示。
由图4的实验结果可以看出,在上述给定条件下,用30℃水对GMM进行冷却,尽管输入电流分别为0.5A、2A和3A大小不同,即产生热量有所不同,但通过曲线图看出经过超磁致伸缩执行器温度控制系统GMM构件温度可维持在29℃~30℃之间,这说明本文设计的超磁致伸缩执行器温度控制系统能够满足冷却要求,从而保证GMM工作在恒定的温度范围。
4 结论
本文在提出一种改进的温度控制策略以实现超磁致伸缩执行器精密的温度控制。系统通过单片机温控系统根据水箱中温度传感器测得水温和设定值比较,如果低于设定值启动加热棒加热,当温度恒定在设定值,启动水泵工作。这种改进的强制水冷方式实现了超磁致伸缩材料工作时温度的恒定,进一步有利于超磁致伸缩执行器精密位移控制。实验结果证明了该控制策略的有效性,对超磁致伸缩材料执行器应用具有实际的工程意义。
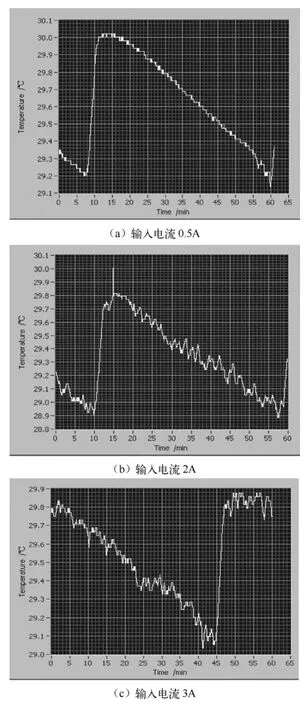
图4 GMM智能构件在不同输入电流时温度随时间的变化曲线图
[1]李碚,伍虹.国外稀土超磁致伸缩材料的研究状况[J].稀土,1990,11(6):52-59
[2]Xiaojing Zheng,Le Sun.A one-dimension coupled hysteresis model for giant magnetostrictive materials[J].Journal of Magnetism and Magnetic Materials,2007,309:263-271
[3]徐君.超磁致伸缩执行器热误差补偿方法研究及测控平台建立[D].浙江大学,硕士学位论文,2007
[4]Shankar Krishnan,Suresh V.Garimella,Sukhvinder S.Kang.A novel hybrid heat sink using phase change materials for transient thermal management of electronics[J].IEEE Transactions on Components and Packaging Technologies,2005,28(2):281-289
[5]贾振元,杨兴,郭东明,侯璐景.超磁致伸缩材料微位移执行器的设计理论及方法[J].机械工程学报,2001,37(11):46-49
[6]宫惠峰.相变贮能材料的研究进展[J].邢台职业技术学院学报,2006,23(01):33-35
[7]邬义杰,项占琴.基于超磁致伸缩材料的活塞异形销孔加工原理研究[J].浙江大学学报(工学版),2004,38(9):1185-1189
The design and realization of giant magnetostrictive actuator’s temperature control system
SUI Xiaomei,CHEN Wenzhuo
(College of Electronic Information Engineering in North China Institute of Science and Technology,Yanjiao Beijing-East101601)
To realize precision displacement control for giant magnetostrictive actuator,a temperature control approach is necessary for constant giant magnetostrictive material(GMM)temperature.Because of inherent GMM temperature sensitivity,an improved forced water-cooled strategy is proposed.The giant magnetostrictive actuator temperature control system is realized by using single-chip microcomputer control system.The validity of control strategy is proved by experiment.The temperature control strategy for giant magnetostrictive micro-driven actuator is of important significance to the actual engineering.
giant magnetostrictive;temperature control;single-chip microcomputer
T29
A
1672-7169(2012)01-0070-04
2012-01-12
隋晓梅(1978-),女,辽宁辽阳人,硕士,华北科技学院电子信息工程学院讲师。
