多参考站GPS网提取精密大气延迟
2012-12-25张宝成欧吉坤袁运斌蒋振伟
张宝成,欧吉坤,袁运斌,蒋振伟
1.中国科学院测量与地球物理研究所 动力大地测量学重点实验室,湖北 武汉430077;2.中国科学院 研究生院,北京100049
多参考站GPS网提取精密大气延迟
张宝成1,2,欧吉坤1,袁运斌1,蒋振伟1,2
1.中国科学院测量与地球物理研究所 动力大地测量学重点实验室,湖北 武汉430077;2.中国科学院 研究生院,北京100049
多参考站GPS网提取的大气延迟可服务于天气预报、精密定位等领域,但相关的提取方法存在缺陷,如已知信息利用不充分、大气延迟模型化误差较大等,影响提取结果的可靠性。从改进的GPS网平差策略入手,导出一种新的提取方法,其主要特点包括:① 直接处理非差GPS观测值,并采用重新参数化方案消除观测方程中的列秩亏;② 发掘各参考站坐标已知、整数双差模糊度等条件;③ 估计斜向的电离层延迟,且采用常速度过程模型化其时间变化特性。试验表明,新方法提取的大气延迟可实现优于1 cm的短期预报精度。
GPS;大气延迟;重新参数化;多参考站网
1 引 言
近年来,GPS大气反演已广泛服务于若干科研和应用领域:基于IGS(international GNSS service)定期发布的全球电离层云图GIM(global ionosphere map)[1],可有效探索与电离层时空演化相关联的现象(如行扰、闪烁等)[2]和机理[3];实时模型化局域或广域的电离层延迟则是网络RTK(real-time kinematic)[4]、WAAS(wide area augmentation system)[5]等技术的实施前提;利用地基或空基GPS网推算中性大气所含的可降水量[6],可有效辅助空间天气的监测和预报。
从GPS数据中精确提取与大气有关的信息,如电离层和对流层延迟量,则是实现上述反演的先决条件[7]。其中,电离层延迟量的标准提取方法为[7-9]:首先,联合无几何影响组合(geometry-free)的GPS伪距和相位观测值,利用相位平滑伪距方法分离电离层可观测量(ionospheric observables),其中主要包含测站至卫星斜向的电离层延迟量以及接收机和卫星的仪器偏差[8,10]。此后,考虑到仪器偏差在一段时间内(如1~3d)不随时间变化[8],采用薄层假设模型化电离层的时空特性[4-5,7],可获取最终的“干净”电离层延迟量[7-10];对流层延迟量的提取则包括采用某数学或物理模型计算其干分量部分[3],以及采用参数估计策略计算其湿分量部分[1,11-12]。
上述大气延迟量的提取方法,存在以下几点不足:① 电离层可观测量的分离易受与测站有关的误差影响,如强观测噪声、伪距多路径效应等,有研究表明,当连续卫星弧段(期间相位观测值不存在周跳)较短时,分离误差的量级最大可达±8.8TECu(电离层总电子含量单位,1TECu可引起约0.162m的L1频率信号延迟)[8];②电离层建模精度受薄层高度、投影函数以及时空环境影响较大,当电离层变化存在异常时,如太阳活动高峰期、地磁活动异常期等,建模误差可达米级[7-9,13-14];③ 忽略了参考站坐标较为精确,相位双差模糊度为整数等有用信息[6,15],降低了提取可靠性。
采用非差GPS网平差方案直接估计电离层斜延迟,可回避标准方法中的电离层可观测量分离以及随后的建模过程,进而消除了与之有关的提取误差。同时,在参数估计中,通过发掘参考站坐标精确已知、整周相位双差模糊度以及电离层延迟平稳变化等有效约束,进一步提高了两类大气延迟量提取的可靠性。
2 基本原理
采用卡尔曼滤波实施参数估计,其观测方程是基于非差GPS观测量。非差模糊度被重新参数化为双差形式[16],以便于利用整数模糊度约束。本节将给出滤波模型中的观测方程和状态方程的具体形式,以及各类参数的状态初值选取方法。
2.1 网平差观测方程
假定卫星和参考站位置已知,GPS伪距和相位观测方程则可联合表示为[17]

式中,r、s和j分别为接收机、卫星和观测频率符号;p和φ分别为伪距和相位观测值,所含的接收机至卫星距离以及部分系统误差(如潮汐、相位绕转等)已事先改正;dtr,j和δtr,j对应于伪距和相位的接收机钟差,且各自吸收了接收机的硬件延迟;和为相应的卫星钟差,同样包含了卫星的硬件延迟;和分别对应伪距和相位观测值中所含的大气延迟量,和分别为对流层和电离层延迟;λj表示波长因子;表示模糊度参数;ε表示观测噪声。
假定某观测历元,n个参考站共观测了m颗共视卫星的双频观测值。基于重新参数化策略[16],可消除线性相关参数(即钟差和模糊度)所引起的列秩亏,所有类似于式(1)的观测方程由此可矩阵化表示为[15-16]

Y和Qy中,部分符号的含义为
式中,Q表示每个测站与卫星相关的精度效应,若不考虑观测值的异方差性,则Qr=Im;同时,根据文献[18—19]的研究结果,将双频GPS伪距和相位的标准差分别选取为σφ=3mm,σp=0.3m。
设计矩阵中相关符号的含义为

分别表示电离层延迟的系数向量和钟差参数的设计矩阵。
表示重新参数化后的相位和伪距钟差,其分别吸收了基准参数和残余的大气延迟量,具体形式可参阅文献[16]。需要指出,钟差与电离层两类参数线性相关,考虑在滤波过程中引入适当的电离层延迟初值,以消除相关的秩亏。
2.2 状态方程及状态初值选取
滤波实施过程中,各类参数的状态方程分别选取为:
(1)当观测时段较长时,对ZTWD实施分批次处理(batch processing)[16],不同批次包含不同的ZTWD参数,而同一批次内,ZTWD则被模型化为时不变参数。根据文献[3]的建议,本文将各批次的时间长度选取为2h。
(2)电离层延迟的状态方程选取为常速度模型,具体形式如下
在式(11)中,将历元时刻k的电离层延迟ιk及其变化率˙ιk作为状态向量,而将其瞬时加速率¨ιk看作白噪声随机过程,且谱密度δ¨ιk经验取为1cm2/s3[21],tk为相邻历元间的时间间隔。
(3)考虑到钟差随时间变化较为显著[22],每历元估计一组新参数,并采用越组约化消参[17],以提高计算效率。
状态参数的初值选取方面:对于各测站的ZTWD参数,其量级较小[1],本文选取0作为其状态初值;电离层延迟的初值则采用文献[7]介绍的标准方法计算得到。为确保滤波过程中两类大气延迟量能获得较符合实际的增益,事先赋予其较大的起始状态噪声方差,如文献[23]推荐选取为150m2。
此外,滤波实施前的初始化阶段,还需要预处理各参考站的GPS数据,以剔除观测值中的粗差或周跳;同时固定独立基线的双差相位整周模糊度,用作随后滤波过程中的一种有效约束。
3 算例分析
为检验本文算法的有效性,对华南某参考站网的实测数据进行了处理。各参考站均装备了双频LEICA GRX1200PRO类型的接收机以及LEIAT504型号的抑径天线,其地理分布、4字符测站名以及所选取的独立基线如图1所示。观测值的采样率为1s,起始观测时刻为2006-03-01T00:00(UTC),截止高度角选为15°,总观测时长为4h。
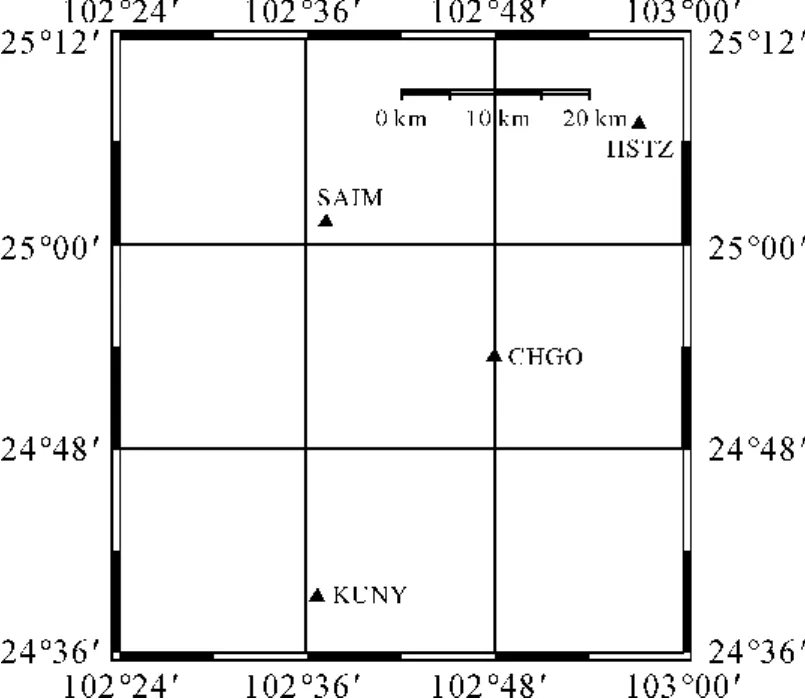
图1 试验参考站网分布图Fig.1 Distribution of experimental reference network stations
数据预处理基于改进的TurboEdit算法[24],以有效探测和修复较小的周跳;采用LAMBDA方法[25]解算各独立基线的整周模糊度,并采用固定失败率的Ratio检验方法[26](fixed-failure-rate ratio)验证模糊度固定的正确性。仅将通过Ratio检验的整周模糊度用作网数据处理中的有效约束。
以接收机SAIM为例,该测站至所有卫星的斜向对流层和电离层延迟分别如图2和图3所示。
除本方法的计算结果外,图2中亦给出了对流层延迟的先验模型值,该模型值与本方法计算值的差异即由ZTWD引起;需要指出,部分卫星的计算结果存在跳变,原因在于按批次估计ZTWD的过程中,相邻批次间的参数尚未施加合理的有效约束。图3中除本文方法计算的电离层延迟外,亦给出了利用文献[7]方法提取得到的对应结果,其中,对于部分卫星,两种方法的结果差异甚至可达到米级,该差异主要源于标准方法中的提取误差影响,尤其针对卫星跟踪早期,由于低高度角观测值中的强多路径效应,上述结果差异较之跟踪后期更为显著,如PRN 2、28等。
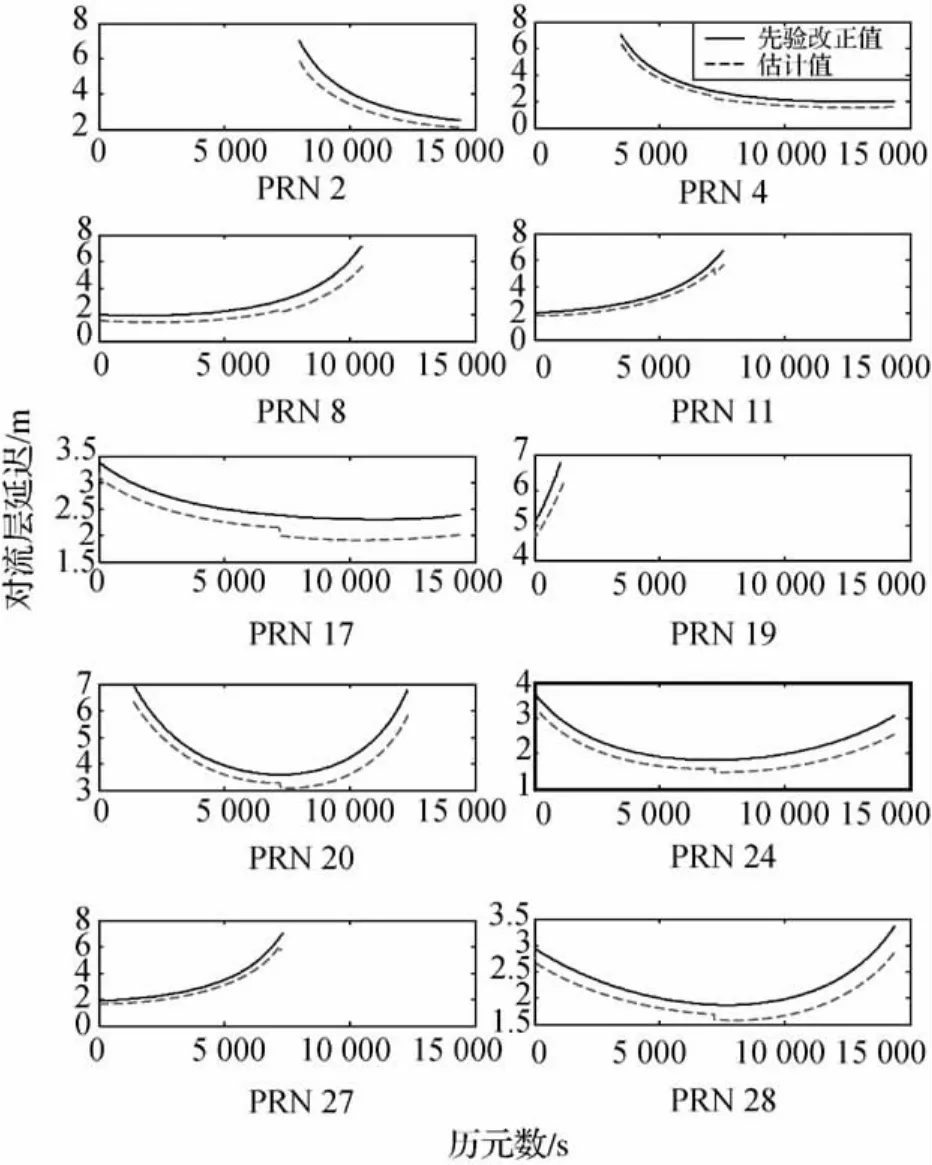
图2 测站SAIM至各卫星对流层斜延迟Fig.2 Slant tropospheric delays from siteSAIM to all satellites
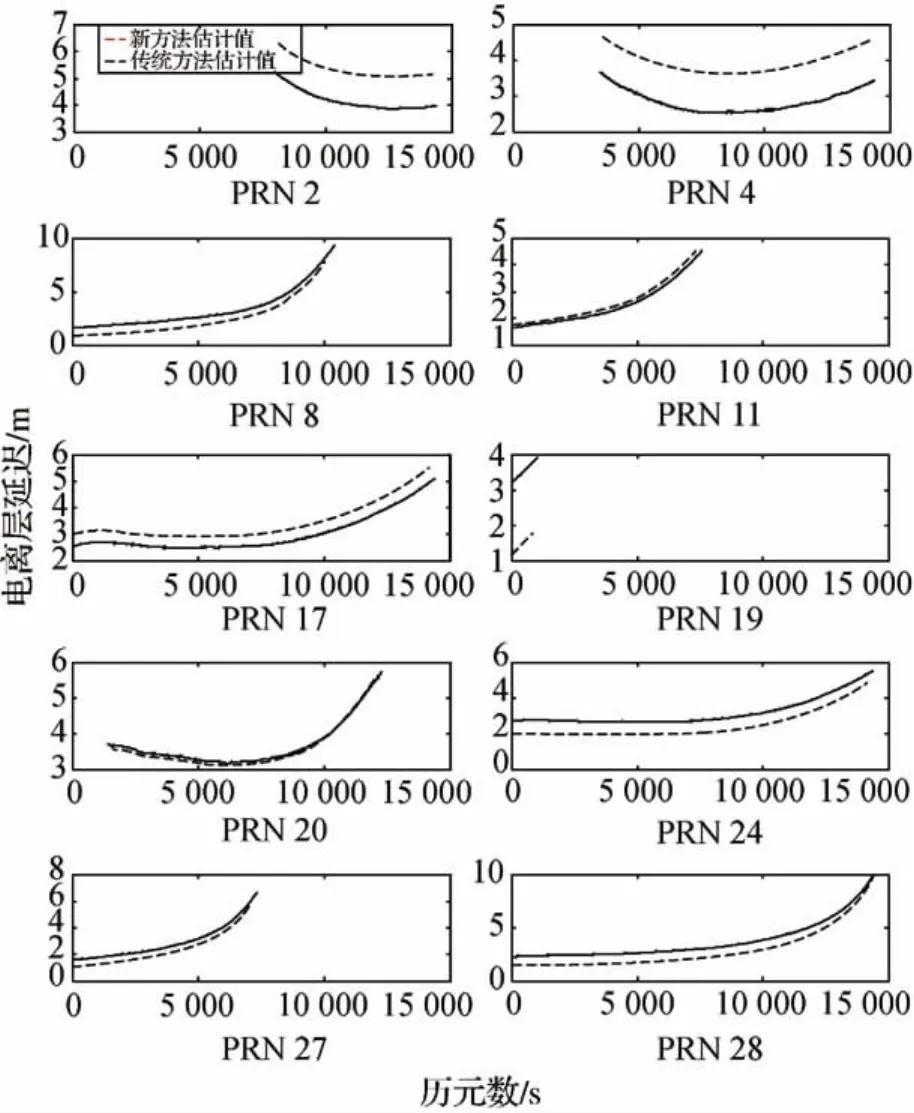
图3 测站SAIM至各卫星电离层斜延迟Fig.3 Slant ionospheric delays from siteSAIM to all satellites
由于缺少独立且精确的大气延迟参考值,同时考虑到大气延迟在极短期内(如1s)的变化稳定性,采用基线KUNY-SAIM的双差相位观测值,其包含的整周模糊度已事先固定并移除,分别设计如下两种大气延迟改正方案,对比检验了新方法与标准方法提取的大气延迟量准确性。
方案1 利用对流层延迟的模型值、电离层延迟的标准方法估值,改正双差观测值,并求解基线分量的单历元固定解。
方案2 基于2.2节中描述的状态方程,对新方法提取的大气延迟进行一步时间预报(预报时长为1s),采用预报值改正对应时刻的双差观测值,进而求解基线分量的单历元固定解。
上述两种方案中,观测值中大气延迟的改正效果将直接体现于基线分量的解算精度,各基线分量的计算误差及相关的统计性质分别如图4和表1所示。
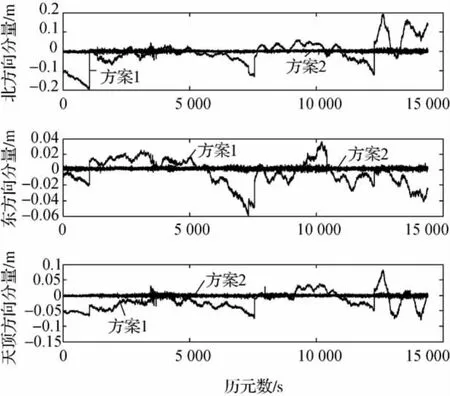
图4 两种方案下KUNY-SAIM三维基线分量解误差Fig.4 Errors in 3-D baseline components of KUNYSAIM under two schemes
对上述计算结果进行分析,可得出下列结论:
(1)比较表1中两方案的统计性质可知,方案1各基线分量的偏差变化最大可达1~2dm,且明显有偏(均值量级为2.9~3.8cm);而在方案2中,对应的偏差变化不超过4cm,均值和标准差分别小于1mm和5mm,故计算结果较方案1更为稳定。
(2)对比图4中两种方案的基线分量误差,由于残余大气延迟的影响,方案1的结果存在较大波动,且变化趋势表现出一定的系统性。而方案2的基线分量误差则具有明显的正态分布特性,进而表明其对应观测值中的系统误差已被修正,而仅余偶然误差的影响。
上述试验结果,从参数域证明了新方法提取大气延迟量的准确性。

表1 两方案计算结果的统计性质Tab.1 Statistics of the computational results from two schemes cm
4 结 论
本文方法较之传统方法具有以下特点:逐历元参数化电离层延迟,克服了标准方法中电离层模型化的不足;发掘了大气延迟的平稳历元间变化[27];考虑了各参考站先验坐标精确已知以及双差整周模糊度约束,最终增强了大气延迟提取的可靠性。
本方法亦可用于网络RTK中系统误差的实时分离和预报,为参考站间的模糊度快速固定、虚拟观测值构建等创造良好的先决条件;导出的非差GPS网平差策略可估计附加整周模糊度约束的卫星钟差[15-16],进而为相关的研究提供便利[22]。
[1] MANNUCCI A J,WILSON B D,YUAN D N,et al.A Global Mapping Technique for GPS-derived Ionospheric Total Electron Content Measurements[J].Radio Science,1998,33(3):565-582.
[2] HUO Xingliang,YUAN Yunbin,OU Jikun,et al.The Diurnal Variations,Semiannual and Winter Anomalies of the Ionospheric TEC Based on GPS Data in China[J].Progress in Natural Science,2005,15(1):56-60.
[3] BRUNINI C,MEZA A,AZPILICUETA F,et al.A New Ionosphere Monitoring Technology Based on GPS[J].Astrophysics and Space Science,2004,290(3-4):415-429.
[4] WANNINGER L.Enhancing Differential GPS Using Regional Ionospheric Error Models[J].Journal of Geodesy,1995,69(4):283-291.
[5] KOMJATHY A,SPARKS L,MANNUCCI A J,et al.An Assessment of the Current WAAS Ionospheric Correction Algorithm in the South American Region[J].Navigation,2003,50(3):193-204.
[6] LIU Yanxiong,CHEN Yongqi.Monitoring the Water Vapor Content in the Atmosphere in Hong Kong through Groundbased GPS Technique[J].Journal of Wuhan Technical University of Surveying and Mapping,1999,24(3):245-248.(刘焱雄陈永奇.地基GPS技术遥感香港地区大气水汽含量[J].武汉测绘科技大学学报,1999,24(3):245-248.)
[7] YUAN Yunbin,HUO Xingliang,OU Jikun.Models and Methods for Precise Determination of Ionospheric Delay Using GPS[J].Progress in Natural Science,2007,17(2):187-196.
[8] CIRAOLO L,AZPILICUETA F J,BRUNNINI C,et al.Calibration Errors on Experimental Slant Total Electron Content(TEC)Determined with GPS[J].Journal of Geodesy,2007,81(2):111-120.
[9] YUAN Yunbin,OU Jikun.The Effects of Instrumental Bias in GPS Observations on Determining Ionospheric Delays and the Methods of Its Calibration[J].Acta Geodaetica et Cartographica Sinica,1999,28(2):110-114.(袁运斌,欧吉坤.GPS观测数据中的仪器偏差对确定电离层延迟的影响及处理方法[J].测绘学报,1999,28(2):110-114.)
[10] ZHANG Baocheng,OU Jikun,YUAN Yunbin,et al.Calibration of Slant Total Electron Content(sTEC)and Satellite-receiver’s Differential Code Biases(DCBs)with Uncombined Precise Point Positioning(PPP)Technique[J].Acta Geodaetica et Cartographica Sinica,2011,40(4):447-453.(张宝成,欧吉坤,袁运斌,等.利用非组合精密单点定位技术确定斜向电离层总电子含量和站星差分码偏差[J].测绘学报,2011,40(4):447-453.)
[11] ZHANG Baocheng.Determination of Un-differenced Atmospheric Delays for Network-based RTK[C]∥Proceedings of Institute of Navigation GNSS 2009.Savannah:[s.n.],2009:2727-2738.
[12] SCHUELER T,HEIN G W,ELISSFELLER B.GNSS Zenith Wet Delay Estimation Considering Their Stochastic Properties[C]∥Proceedings of GNSS’99,3rd European Symposium.Genua:[s.n.],1999.
[13] ODIJK D.Instantaneous Precise GPS Positioning under Geomagnetic Storm Conditions[J].GPS Solutions,2001,5(2):29-42.
[14] YUAN Yunbin,OU Jikun.A Generalized Trigonometric Series Function model for Determining Ionospheric Delay[J].Progress in Natural Science,2004,14(11):1010-1014.
[15] ODIJK D.Fast Precise GPS Positioning in the Presence of Ionospheric Delays[D].Delft:Delft University of Technology,2002.
[16] De JONGE P J.A Processing Strategy for the Application of the GPS in Networks[D].Delft:Delft University of Technology,1998.
[17] XU Guochang.GPS:Theory,Algorithms and Applica-tions[M].Heidelberg:Springer Verlag,2003.
[18] LI Bofeng,SHEN Yunzhong,XU Peiliang.Assessment of Stochastic Models for GPS Measurements with Different Types of Receivers[J].Chinese Science Bulletin,2008,53(20):3219-3225.
[19] LIU Xianglin.Quality Control and Stochastic Model Refinements for Precise GPS Kinematic Positioning[D].Wuhan:Wuhan University,2002.(柳响林.精密GPS动态定位质量控制及随机模型精化[D].武汉:武汉大学,2002.)
[20] BOEHM J,NIELL A,TREGOING P,et al.Global Mapping Function(GMF):A New Empirical Mapping Function Based on Numerical Weather Model Data[J].Geophysical Research Letter,2006,33(7):3-6.
[21] GOAD C C.Optimal Filtering of Pseudoranges and Phases from Single-frequency GPS Receivers[J].Navigation,1990,37(3):249-262.
[22] LIU Xianglin,TIBERIUS C,De JONG K.Modelling of Differential Single Difference Receiver Clock Bias for Precise Positioning[J].GPS Solutions,2004,7(4):209-221.
[23] YAN Wei,YUAN Yunbin,OU Jikun,et al.Feasibility of Precise Timing with Uncombined PPP[J].Geomatics and Information Science of Wuhan University,2011,36(6):648-651.(闫伟,袁运斌,欧吉坤,等.非组合精密单点定位算法精密授时的可行性研究[J].武汉大学学报:信息科学版,2011,36(6):648-651.)
[24] WU Jizhong,SHI Chuang,FANG Rongxin.Improving the Single Station Data Cycle Slip Detection Approach TurboEdit[J].Geomatics and Information Science of Wuhan University,2011,36(1):29-33.(吴继忠,施闯,方荣新.TurboEdit单站GPS数据周跳探测方法的改进[J].武汉大学学报:信息科学版,2011,36(1):29-33.)
[25] TEUNISSEN P J G.The Least-square Ambiguity Decorrelation Adjustment:a Method for Fast GPS Integer Ambiguity Resolution[J].Journal of Geodesy,1995,70(1-2):65-82.
[26] TEUNISSEN P J G,VERHAGEN S.The GNSS Ambiguity Ratio-test Revisited:a Better Way of Using It[J].Survey Review,2009,41(312):138-151.
[27] OU Jikun.Uniform Expression of Solutions of Ill-posed Problems in Surveying Adjustment and the Fitting Method by Selection of the Parameter Weights[J].Acta Geodaetica et Cartographica Sinica,2004,33(4):283-288.(欧吉坤.测量平差中不适定问题解的统一表达与选权拟合法[J].测绘学报,2004,33(4):283-288.)
Extracting Precise Atmospheric Propaganda Delays from Multiple Reference Station GPS Networks
ZHANG Baocheng1,2,OU Jikun1,YUAN Yunbin1,JIANG Zhenwei1,2
1.Key Laboratory of Dynamic Geodesy,Institute of Geodesy and Geophysics,Chinese Academy of Sciences,Wuhan 430077,China;2.Graduate University of Chinese Academy of Sciences,Beijing100049,China
The atmospheric propaganda delays extracted from multiple reference station GPS networks can serve for weather forecasting,precise positioning and so on,the related extracting method however consists of drawbacks that affect the reliability of the obtainable results,such as inadequate adoption of the known information,severe atmospheric modeling errors.Starting from the modified strategy for GPS network processing,a novel extracting method is derived,whose main points include:①directly processing of the un-differenced GPS observables,and elimination of the rank-deficiencies in the observation equations based upon re-parameterization;②exploiting the conditions of a-priori known coordinates of the reference stations and the integer-valued nature of the double-differenced ambiguities;③introducing the slant ionospheric delays as one of the unknowns,whose temporal behaviors are characterized as constant-velocity process.Experimental results demonstrate that the short-term predicting precision of the atmospheric delays derived from the new method is at the level better than 1 cm.
GPS;atmospheric propaganda delays;re-parameterization;multiple reference station networks
ZHANG Baocheng(1985—),male,PhD candidate,majors in applications of precise point positioning and network-based RTK.
ZHANG Baocheng,OU Jikun,YUAN Yunbin,et al.Extracting Precise Atmospheric Propaganda Delays from Multiple Reference Station GPS Networks[J].Acta Geodaetica et Cartographica Sinica,2012,41(4):523-528.(张宝成,欧吉坤,袁运斌,等.多参考站GPS网提取精密大气延迟[J].测绘学报,2012,41(4):523-528.)
P228
A
1001-1595(2012)04-0523-06
国家自然科学基金(40874009;41074013;41174015;41104012);国家海洋局第二海洋研究所基本科研业务经费(JT1003)
雷秀丽)
2011-08-08
2011-12-25
张宝成(1985—),男,博士生,研究方向为精密单点定位(PPP)与网络RTK技术的应用。
E-mail:b.zhang@whigg.ac.cn