基于在线自适应整定的控制器设计与仿真
2012-12-17克拉玛依职业技术学院张雪琴
克拉玛依职业技术学院 张雪琴
数控机床控制主轴运动装置也可称之为数控机床传动系统,它在数控系统运行过程中主要功能是完成控制主轴运动系统的动力装置部分。
作为主轴驱动电动机重要驱动形式的电主轴驱动,它的驱动器可以使用主轴伺服,甚至还可以不采用任何驱动器方式。电主轴在驱动过程中由于采用了电能这种驱动形式它在驱动过程中取消了传动机构,因此,不但在一定程度上尽可能的精简了主轴结构,而且还增强了数控机床的运动精度,其缺点是机床的刚度相对较弱,而且功率比较而言不高,多数都在10KW之内。基于以上分析的特点,其主要发展方向为高速、高精度,一般设计转速均在每分钟1万转以上。
1.传统PlD算法
传统的PID控制算法组成结构图,如图1所示,分别有比例控制、积分控制和微分控制组成。
传统经典PID控制器控制规律为:其中:KP为比例系数

KI为积分系数KD为微分系数
PID控制器各部分作用如下:
(1)比例控制(P):引入比例控制的主要是为了及时成比例地反映控制系统的偏差信号,以最快速度产生控制作用,使偏差向减小的方向变化;
(2)积分控制(I):引入积分控制的主要是为了保证实际输出值在稳态时对给定输入值的无静差跟踪;
(3)微分控制(D):引入微分控制的主要是为了改善闭环系统的稳定性和动态响应速度。
2.在线自适应整定PlD算法
学习是在线自适应整定PID算法的主要特征之一。学习规则是根据已获得的知识结构来适应控制目标的变化。无监督的学习方法是指不需要外界控制信号,无监督的学习规则表现为:给系统提供动态输入信号,以使各个单元以某种方式竞争进而寻找有用的数个区间。以Oi表示单元i的激活值,Oj表示单元j的激活值,Wij表示单元i到单元j的激活值,则其关系可用下式表示:

其中η是学习速率。
自适应整定整定规律:
(1)当|e|较大时,为提高控制系统对实际的快速响应特性,则此时应该至Kp为较大的数值和较小的Kd,通常取Ki=0;
(2)当|e|和|ec|中等大小时,为改善系统的控制效果,Kp应取小些,否则将会明显影响控制效果;
(3)当|e|较小时,为提高系统的控制效果可以将Kp和Ki的数值取得较大。
3.仿真实验分析
基于在线自适应整定PID算法的理论分析,采用matlab软件对算法的仿真响应曲线进行了分析与研究,图2为自适应整定PID算法仿真响应曲线图,从图中可以发现系统控制时间较短且精度较高。
4.结束语
本文采用当今流行的MATLAB软件,对数控机床控制系统的在线自适应整定PID算法进行了分析与研究并通过计算机进行了仿真,仿真实验表明了在线自适应整定PID算法可以实现较高的控制精度。

图1 经典PlD控制算法组成结构图Fig.1 PlD control system structure
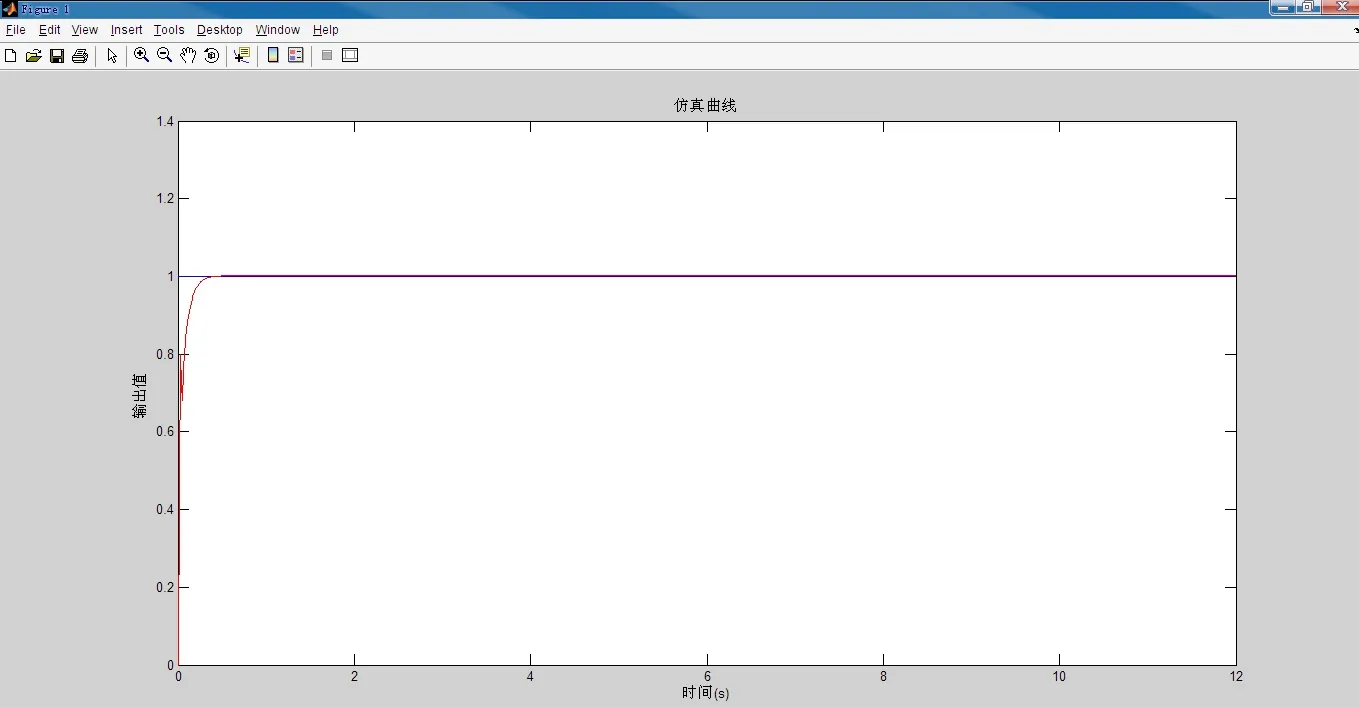
图2 仿真响应曲线图Fig.2 Simulated response curve
[1]周明,孙树栋.遗传算法原理及应用[M].北京:国防工业出版社,2002.
[2]熊维族,叶中付.一种利用遗传算法的极化定标算法[J].系统工程与电子技术,2007,29.
[3]朱福喜,朱三元,伍春香.人工智能基础教程[M].北京:清华大学出版社,2006.
[4]陈国良,王煦法,庄镇泉,等.遗传算法及其应用[M].北京:人民邮电出版社,1996.
[5]黄忠霖.控制系统MATLAB计算及仿真[M].北京:国防工业出版社,2001.
[6]楼顺天,等.MATLAB程序语言设计[M].陕西:西安电子科技大学出版社,1998.