基于光电导航的自主循迹智能车系统设计
2012-12-17西南科技大学信息工程学院曾伟钦徐东升冉志勇
西南科技大学信息工程学院 曾伟钦 徐东升 冉志勇 陈 潇
1.引言
“飞思卡尔”杯全国大学生智能汽车竞赛以最短时间跑完赛道为目标,尽可能地使车模达到“稳、快、准”的要求,这不仅要求车模有灵敏、准确的传感器系统,同时智能车系统的整体设计也是至关重要。基于光电导航的自主循迹智能车系统,通过各个模块的相互配合,使智能车“自适应”地沿着既定的赛道行驶。该系统设计合理,控制准确,稳定性高,经过不断调试和优化,该设计方案能够达到智能车系统设计要求。
2.系统整体硬件设计
系统整体硬件设计如图1所示,包括:MCU模块、传感器模块、电源模块、车速检测模块、舵机模块、电机驱动模块、辅助调试等模块。
2.1 MCU微控制器
微控制器选用飞思卡尔半导体公司Kinetis产品中的K60P100-SYS,其具有器件充电检测、硬件加密和篡改加密和篡改检测功能。器件带有丰富的模拟、通信、定时和控制外围设备,高闪存密度K60系列器件包括可选单精度浮点单元、NAND闪存控制器和DRAM控制器。该单片机丰富的资源能够满足系统的要求,且其体积小、功耗低。
2.2 传感器
光电传感器检测路面信息的原理是由发射管发射一定波长的光线,经地面反射到接收管。由于在黑色和白色上反射系数不同,在黑色上大部分光线被吸收,而白色上可以反射回大部分光线,所以接收到的反射光强是不一样,进而导致接收管的特性曲线发生变化程度不同,而从外部观测可以近似认为接收管两端输出电阻不同,进而经分压后的电压就不一样,就可以将黑白路面区分开来。
2.2.1 红外传感器
采用反射式红外光电管,是路径检测常用的方法。这种方法利用了路面不同材料和颜色对光线的吸收和反射量不同,这样通过检测反射回来的光线就可以得到当前位置的材料或者颜色。这种方法电路简单,信号处理速度快,但感知前方赛道距离有限,受外界红外频段光线干扰,精度比较低。
2.2.2 激光的原理及特性
激光的英文名为LASER(Light Amplification by Stimulated Emission of Radiation),意思是“受激辐射的光放大”,即激光的产生源自于受激辐射。激光主要有四大特性:高亮度、高方向性、高单色性和高相干性。基于激光的这些特性,本智能车系统采用激光作为传感器,并确定“八字”排列方式,大大提高智能车感知前方赛道的距离。
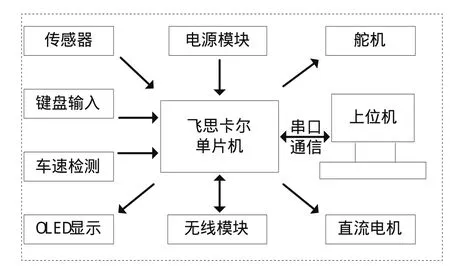
图1 系统整体硬件设计图
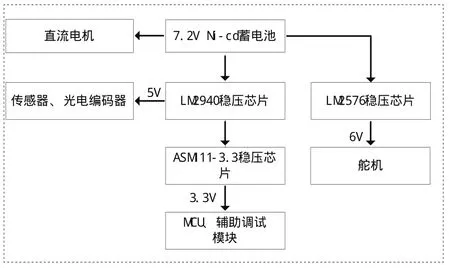
图2 电源系统图

图4 舵机、直流电机PlD控制原理图
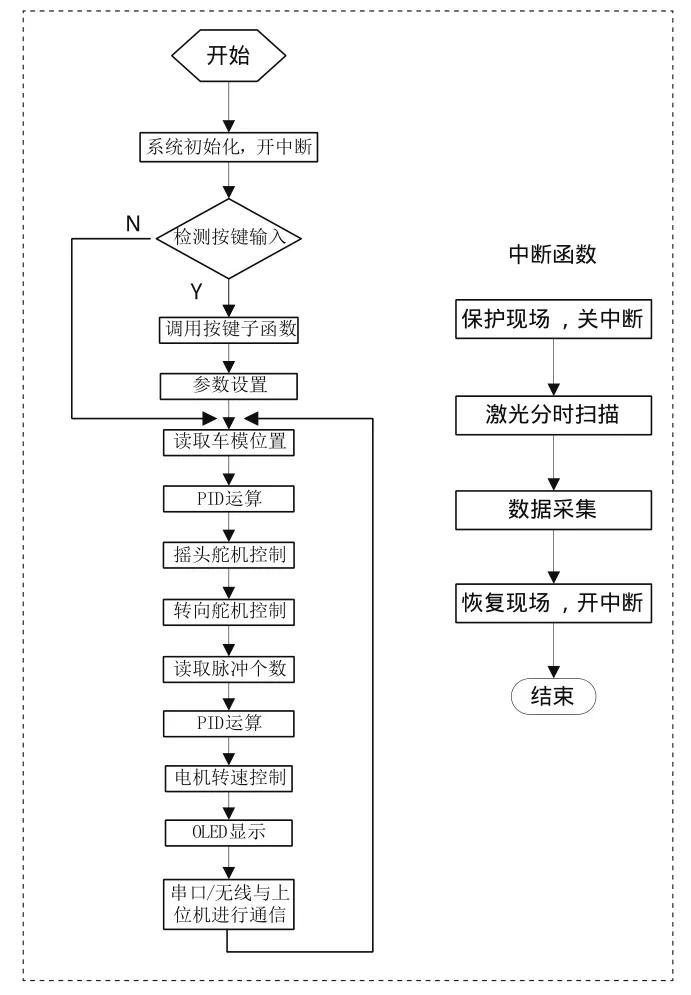
图3 系统程序流程图
2.3 电源系统
在智能车设计中,电源关系到整个电路设计的稳定性和可靠性,是电路设计中非常关键的一个环节。整个系统由7.2V Ni-cd蓄电池经过稳压分别给各个模块供电,电源系统如图2所示。
2.4 车速检测模块
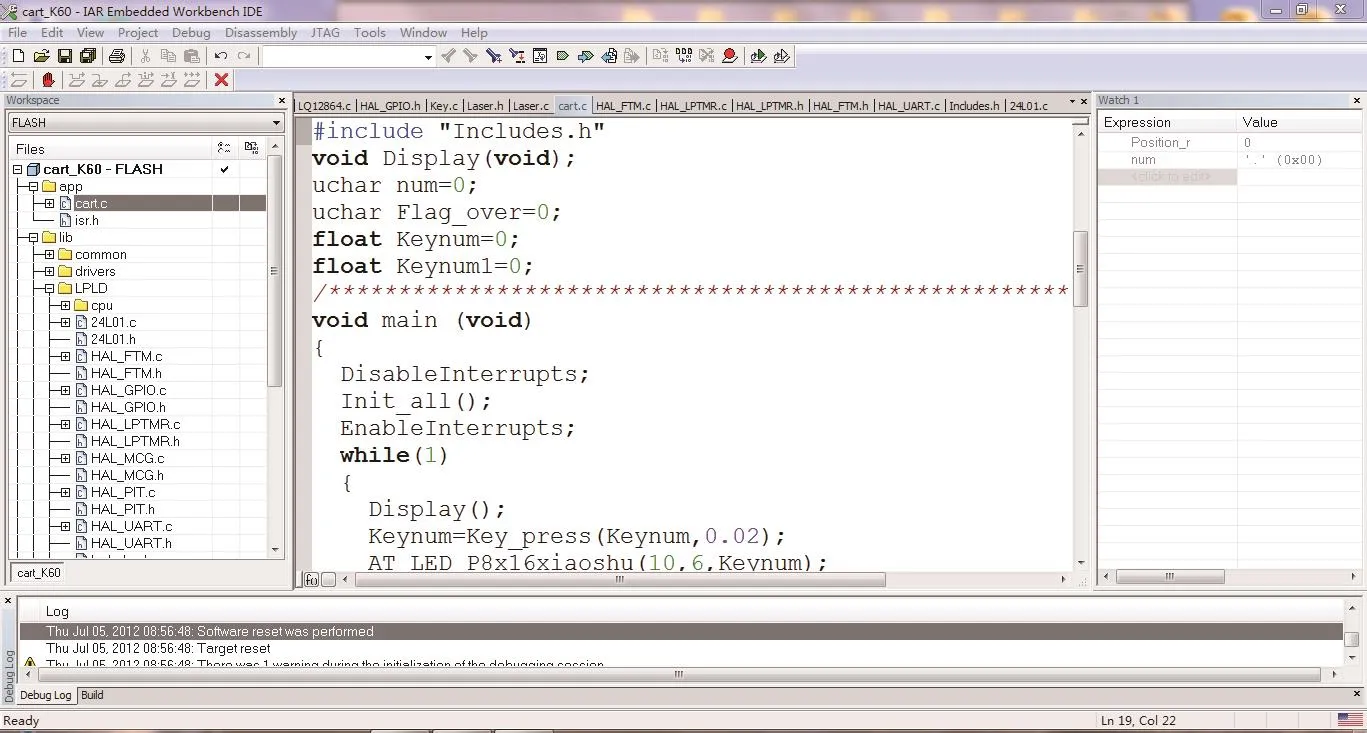
图5 lAR在线仿真界面图
在智能汽车设计中,测速传感器的设计主要有两种方案:霍尔传感器和光电式脉冲编码器。本系统采用光电编码器进行车速检测,将采集到的脉冲个数送到PID控制器进行闭环反馈控制。
2.5 舵机
舵机主要由几个部分构成:外壳、减速齿轮组、电机、电位器、控制电路,简单的工作原理是控制电路接受信号源的控制信号,并驱动电机转动。齿轮组将电机的速度成大倍数缩放,并将电机的输出转矩放大响应倍数,然后输出。电位器和齿轮组的末级一起转动,测量舵机轴转动角度,电路板检测并根据电位器判断舵机转动角度,然后控制舵机转动到目标角度或保持在目标角度。在本系统中采用模拟舵机S3010作为摇头舵机,数字舵机S-D5作为转向舵机。
2.6 电机驱动
在智能车竞赛中,智能车的速度较快,通常达到2m/s以上,因此对电机驱动电流的要求较高,电机驱动电路必不可少。直流驱动电机控制电路主要用来控制直流电动机的转动方向和转动速度。PWM信号的占空比决定电机的转速,故电机的调速可通过改变PWM信号的占空比实现。驱动电路既可以直接采用MC33886、BTS7960B电机驱动芯片,也可以采用大功率MOS管来自行设计电机驱动电路。我们选用了驱动芯片BTS7970B,其为高强度电流的半桥电机驱动芯片,我们利用两片BTS7970B构成一个完整的全桥驱动,可以很好实现电机的正转、反转、刹车制动。

图6 上位机界面图
2.7 辅助调试模块
辅助调试模块使得调试更为方便,提高了调试的效率。本系统的辅助调试模块包括:键盘、OLED显示屏、串口、无线通信IRF2401、上位机等。其中键盘用于一些参数的设置和选择,OLED显示屏用于参数的显示,串口与上位机进行串口通信用于发送和显示一些参数,IRF2401进行无线通信。
3.系统机械设计
智能车的机械性能对于其行驶具有非常重要的影响,为使其直线行驶高速稳定,入弯转向灵活,结合现代汽车控制理论对智能车的运动特性进行分析,并据此对智能小车的机械结构进行相应的调整和参数优化。
3.1 车模重心调整
由于智能车在赛道上行驶追求高速和稳定,重心高度的调整至关重要,重心越低车辆行驶越稳定,尤其是在高速行驶时这点可以体现的非常明显,所以我们尽量调整使车模的重心调低。
3.2 舵机安装
智能车的拐弯是舵机通过连杆带动前轮转动,实现转弯。在理想情况下即智能车不发生侧滑时,舵机的响应速度越快智能车行驶的速度就越快。我们通过将舵机采用直立式安装和加长舵机臂,以提高舵机的响应速度。
3.3 光电编码器安装
安装对于齿轮咬合效果好坏有至关重要的影响。首先最关键的是编码器自身要固定牢固;其次要调整好两个咬合齿轮间的距离:齿轮与齿轮间距离不能太近或太远,否则会卡齿或滑齿;最后要保持几个“同心与平行”:齿轮安装要与轴同心,尽量做到电机轴、编码器轴两轴平行;安装时应使齿轮咬合流畅。
3.4 传感器安装
传感器的安装位置,关系到信息采集的准确性等各方面因素。传感器我们采用“摇头”方案,使巡线更加准确、快速,并尽可能加长传感器感知前方赛道的距离和降低其重心。
3.5 车模前轮调整
汽车的前轮定位参数包括:前束(角)、外倾角、主销后倾角、主销内倾角、推力角、轴距差、轮距差。适当地调整这些参数可以使汽车直线行驶稳定,转向轻便,转向后能自动回正,并减少轮胎和转向系零件的磨损。
4.系统软件设计
智能车系统的软件编写是基于K60P100-SYS单片机,主要用到其中的FTM模块,PIT模块、LPTMR模块、I/O模块以及UART模块等模块化设计。FTM模块用于产生PWM信号用来控制舵机转向和电机转速;LPTMR模块用于车模速度检测;I/O模块主要用于激光管扫描、信息采集及键盘输入等;UART模块主要用在无线、串口调试模块。
系统启动后,单片机进入主函数进行初始化设置,包括端口初始化、PWM初始化、定时器/中断初始化、OLED显示屏初始化、串口初始化、无线初始化等;并检测按键进行参数的设置和选择。进入死循环后,经过一个控制周期(4ms)后计算出车模偏离赛道中心的程度进行PID运算,控制舵机的转向和直流电机的转速。中断函数中(定时500us),主要进行激光的分时点亮和数据采集。当要观察某些变量实时变化情况时,可以用OLED显示屏显示或者通过串口、无线与上位机进行通信,系统程序流程图如图3所示。
4.1 激光分时点亮与数据采集
因为我们采用多个激光对应一个接收管的方案,所以激光采用了分时点亮的方式避免相互干扰问题,分时点亮的时间间隔为500us。每个激光照射在黑线时赋予不同的权值,数据采集后进行简单滤波,综合左右两边激光的权值即可得出车模偏离赛道中心的程度。
4.2 方向控制与直流电机调速
方向控制与电机控制采用典型的PID闭环控制方法。得到车模偏离赛道中心的程度后,通过进行PID控制器运算,控制舵机PWM信号的占空比,改变舵机的转角。通过车速检测模块采集的脉冲个数进行闭环反馈控制,控制直流电机PWM信号的占空比,改变直流电机的转速。经过舵机和直流电机调整的配合,从而使车模沿着既定的轨道行驶。舵机、直流电机PID控制原理图如图4所示。
5.开发、调试工具
5.1 IAR环境功能
Embedded Workbench for ARM 6.10是IAR Systems公司为ARM微处理器开发的一个集成开发环境,比较其他的ARM开发环境,IAR具有入门容易、使用方便和代码紧凑等特点。IAR中包含一个全软件的模拟程序(simulator),用户不需要任何硬件支持就可以模拟各种ARM内核、外部设备甚至中断的软件运行环境,从中可以了解和评估IAR的功能和使用方法。
5.2 BDM开发工具
用IAR开发环境进行BDM在线调试可以在线调试车的参数,例如测试采集到的传感器的状态时可以很方便的进行更改和调试,IAR在线仿真界面如图5所示。
5.3 上位机
BDM在线调试存在不足和不便之处,想动态地跟踪车的各种参数并实时地传输给电脑,我们采用的是用无线发送数据给电脑,由上位机进行处理。这很方便我们进行实时地观看跟踪。在进行控制速度的调节中,上位机发挥出了很大的优势,我们对采集到的波形进行分析,不断调整参数,最终达到了一个较满意的状态。图6为进行直流电机PID调速测试图。
6.结论
该系统设计合理,既有稳定的电路系统和硬件平台,软件设计采用模块化设计思想,提高了程序可靠性和稳定性,同时通过调整车模机械结构使其配合系统硬件和软件,使车模达到最优状态。测试结果表明,该系统控制准确,“自适应”能力强,具有人性化的人机交互界面。该系统可以用于智能控制方面,完成一些自动化操作要求。
[1]毕晓辉,于春梅,安永泉,等.自动控制理论[M].北京:北京工业出版社,2006.
[2]康华光,陈大钦,张林.电子技术基础[M].北京:高等教育出版社,2006.
[3]王兆安,黄俊.电力电子技术[M].北京:机械工业出版社,2011.
[4]汤蕴璆,罗应力,梁艳萍.电机学[M].北京:机械工业出版社,2008(5).
[5]孙同景,陈桂友.Freescale 9S12十六位单片机原理及嵌入式开发技术[M].北京:机械工业出版社,2008(5).
[6]雷贞勇,谢光骥.飞思卡尔智能车舵机和测速的控制设计与实现[J].电子设计工程,2010(2),18(2),
[7]李慧,李秀歌,娄利峰.飞思卡尔智能车设计方法讨论[J].长春工程学院学报(自然科学版),2012,13(1).
[8]杨春旭,林若波,彭燕标.基于PWM控制的直流电机调速系统的设计[J].齐齐哈尔大学学报,2011(5).
[9]金奇,邓志杰.PID控制原理及参数整定方法[J].重庆工学院学报(自然科学),2008(5).
[10]黄伟峰,吴丽宏.基于单片机的直流电机调速系统设计与仿真[J].机电工程技术,2010,39(12).
[11]飞思卡尔微控制器产品[EB/OL].http://www.freescale.com.cn/products/Kinetis_ARM_Cortex-M4_Microcontrollers.asp
[12]第七届全国大学生“飞思卡尔”杯智能汽车竞赛竞速比赛规则与赛场纪律[EB/OL].http://www.smartcar.au.tsinghua.edu.cn/web/rules.html.