泵喷推进航行体有动力流场数值仿真*
2012-12-10段相杰董永香冯顺山邵志宇
段相杰,董永香,冯顺山,邵志宇
(北京理工大学爆炸科学与技术国家重点实验室,北京 100081)
0 引言
泵喷推进器由于其良好的低噪声特性,被广泛用作水下航行体的推进装置[1]。泵喷推进器的存在,显著改变了航行体尾部的流场性能,必然对航行体水动力特性形成较大影响,因而研究泵喷推进航行体的有动力流场具有重要意义。
有动力航行体流体动力特性研究采用风洞或水洞试验方法经济成本高,且研究周期长[2],理论上针对泵喷推进器水动力性能的计算尚不成熟,数值仿真方面,大多文献只建立泵喷推进器内流场仿真模型,无法研究泵喷推进器内流场与航行体外流场的相互影响。研究船舶的螺旋桨与船体流场的相互作用可作为研究泵喷推进航行体有动力流场的借鉴,文献[4]中采用周向平均的混合面方法实现了船/浆整体流场建模和求解,文献[5]中采用MRF模型处理对转浆的相互干扰。
在上述分析基础上,依据多参考系模型(MRF)将泵喷推进器内流场与航行体外流场关联起来,对泵喷推进航行体有动力流场数值仿真,分析泵喷推进器的作用原理;研究泵喷推进器对航行体水动力参数(纵向力系数、垂向力系数和俯仰力矩系数)的影响规律。
1 有动力流场模型的建立
1.1 计算域及网格划分
图1为文中所研究的泵喷推进航行体结构图。选择长方体型计算域。计算域大小参照航行体最大直径d,坐标系选在航行体头部顶点,进口、出口、四周边界距原点的距离分别为15d、15d、35d。流场结构如图2所示。以推进器进口、出口和导管为界,将计算域分成内流场和外流场。在内流场,再划分出转子流场。考虑到泵喷推进器内部结构的复杂性,内流场使用非结构四面体网格。外流场使用高质量、数量少的六面体结构网格。结构化网格与非结构化网格在毗连边界面上进行匹配对接,从而较好的保证了计算网格的连续性[3]。在航行体、导管、转子、定子、轮毂表面划分较密的网格,以很好的捕捉边界层流动。
为便于分析对比,建立单独航行体模型(记作B模型),即将泵喷推进器的转子、定子和导管去掉,轮毂部分作为航行体假尾。带有泵喷推进器的模型记作B+P模型。
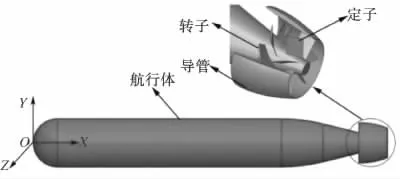
图1 带有泵喷推进器的水下航行体

图2 流场结构图
1.2 数学模型
采用雷诺平均法的控制方程为RANS方程,它包括连续性方程和动量方程。不可压缩流体RANS方程的张量形式为[4]:
连续性方程:

动量方程:
式中:ui、uj为速度分量;μ为分子粘性系数;为附加的雷诺应力项。
对于转子流场需建立在旋转坐标系上,在此坐标系中,网格在计算时保持静止,考虑了哥氏力和离心力后进行定常计算。旋转坐标系下的动量方程为:
式中:vr为相对速度矢量;Ω为旋转坐标系的旋转角速度;r为质点在旋转坐标系中的位置矢量;τ为粘性应力张量;f为单位质量力;2Ω ×vr为哥氏力;ρ(Ω ×Ω×r)为离心力。
文中采用 k-ε两方程模型的一种改进模式k-εRNG模型,该模型基于重整化群理论,在形式上与k-ε模型相似,在耗散率输运方程中增加了附加项,提高了对高速张紧流动预测的准确性;为普朗特数提供解析表达式,精度较高;且考虑了湍流涡流的影响比较适合于旋转坐标系中的流动。
1.3 边界条件及求解参数设置
采用Fluent软件的多参考系模型(MRF),将航行体外流场和内流场定义为静止流场,转子流定义为旋转流场,绕航行体纵轴旋转。航行体表面、导管内外表面、定子、轮毂都设置为静止壁面(wall)边界,将转子设置为运动壁面,且相对转子流场转速为零,从而实现转子的旋转运动。各子流场的分界面都设置为内部表面(interface)边界,进口和四周边界设置为速度入口(velocity inlet)边界,出口设置为压力出口(pressure outlet)边界。
求解时,根据航行体使用环境,流体为海水介质,密度取1024kg/m3,粘性系数为0.001003。根据不同工况条件,给定进口和四周边界的速度大小和方向向量、转子流场即推进器转子的转速、出口的表压等参数;采用基于压力的求解器,用SIMPLEC法处理压力-速度耦合;监视残差和阻力系数、升力系数随迭代步数的变化,当残差小于10-4且阻力系数和升力系数在迭代10步以内变化不超过10%则认为计算收敛。
1.4 仿真方法验证
利用泵喷推进器航行体静水槽试验数据对仿真方法进行验证。静水槽试验目的是测试推进器推力和失衡力矩,水槽长11m、宽3m、水深1.5m,航行体距水面距离0.5m。根据静水槽试验条件,设置泵喷航行体仿真模型的进口速度为零,工作环境压力为(101325+5000)Pa,即水深为0.5m处的压力,出口的表压为零。对试验的6种工况进行仿真,得出推进器不同转速下的推力仿真值与试验值对比曲线如图3所示。
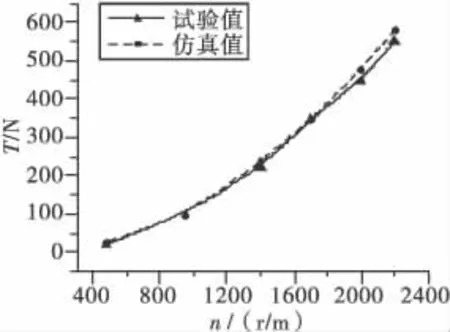
图3 泵喷推进器推力的仿真值与实验值对比
可以看出,仿真结果与试验值吻合较好,相对误差在10%以内,说明了文中所建立的仿真模型的可行性并具有一定的精度。图 4为航行体失衡力矩ΔMxp的仿真结果,由图可知失衡力矩随转速的增加而增加,这与试验时航行体转速越大,偏转的角度越大的试验结果相一致。
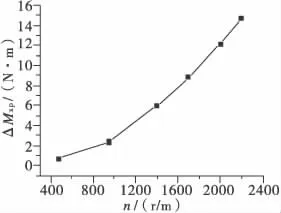
图4 泵喷推进器失衡力矩随转速变化趋势
2 结果分析
下面对B模型和B+P模型的全尺度1∶1模型,依照无动力和有动力水洞试验条件,设置进口速度为航行体稳定航速v=10m/s,推进器转速为额定转速nr=2500r/m。对来流攻角α=-8°~8°的不同工况进行仿真,求得两种模型的位置力参数(纵向力系数CX=X/( 0.5ρv2S)、垂向力系数CY=Y/( 0.5ρv2S)和俯仰力矩系数CN=N/( 0.5ρv2SL))随攻角的变化曲线。其中:X、Y、N分别为模型所受的纵向力、垂向力和俯仰力矩;ρ、v、S、L分别为水的密度、进口速度、航行体最大横截面积和航行体长度。
图5和图6是泵喷推进器内流场的压力分布图和速度分布图,从图中可以看出,转子绕纵轴高速的旋转,将流体向后快速推出,使得在转子的推力面产生高压,吸力面产生低压,两侧的压力差正是转子产生推力的原因。减速型导管对流体的阻滞作用降低了流体进入推进器的速度,使转子工作在速度较低、压力较高的环境中,有助于降低空泡噪声。
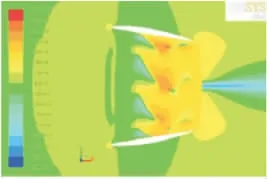
图5 泵喷推进器内流场压力分布图
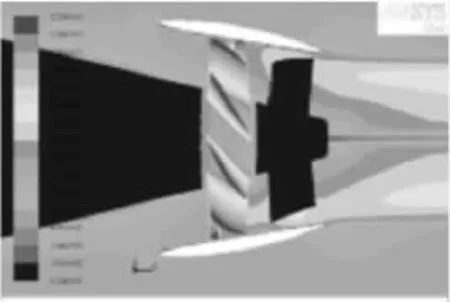
图6 泵喷推进器内流场速度分布图
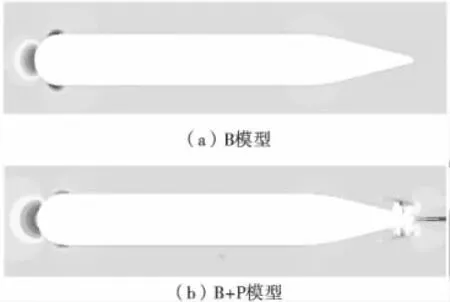
图7 B模型与B+P模型压力分布图对比
图7是B模型与B+P模型压力分布对比图,从图中可以看出,由于航行体头部对流体的阻滞,两种模型都在航行体头部形成一个局部静压高于来流静压的正压驻点区,流体沿头部对称的排开加速,又使压力陡然下降,在头部与圆柱部交接处形成低压环。

表1 B模型与B+P模型头部和尾部静压值对比
表1给出的是在航行体头部和尾部相同参考点处两种模型的静压值对比。从表中可以看出,泵喷推进器对头部静压影响不大,而在尾端部,对于B+P模型,由于推进器尾流的影响,使得此处静压比B模型降低了56%。这必然增大航行体的压差阻力。表2给出的是两模型中航行体的阻力系数对比,有动力后航行体阻力系数比原来增加了47%,其增加主要来自压差阻力。

表2 B模型与B+P模型阻力系数对比
文献[1]中指出,泵喷推进器对航行体稳定性的影响与导管的设计密切相关,如果导管设计的合理可使泵喷推进器对航行体稳定性的影响减小到零。图8和图9是B模型与B+P模型的垂向力和俯仰力矩的对比曲线。从图可以看出,文中所研究的泵喷推进器使航行体的垂向力系数增大了2%,俯仰力矩减小了3%,说明此泵喷推进器能对航行体稳定性无明显影响,该泵喷推进器的导管设计比较合理。
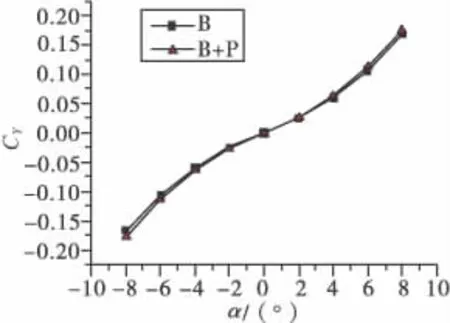
图8 B模型与B+P模型垂向力系数对比曲线
3 结论

图9 B模型与B+P模型俯仰力矩系数对比曲线
通过文中对泵喷推进航行体有动力流场的建模仿真,获得的主要结果如下:
1)通过引入多参考系模型(MRF)将泵喷推进器内流场与航行体外流场关联起来,建立了泵喷推进航行体的有动力整体流场模型及仿真方法,并经过试验数据验证了其可行性;
2)基于仿真获得了泵喷推进航行体有动力整体流场的全物理图像,据此初步分析了泵喷推进器的作用原理;
3)对于文中所研究的泵喷推进器,使航行体航速为10m/s的阻力系数增大约47%,对垂向力系数和俯仰力矩系数影响小于3%,对航行体稳定性影响较小,导管设计合理。
文中所建立的泵喷推进航行体的有动力流场模型可为泵喷推进航行体水动力特性研究提供重要参考。
[1]李天森.鱼雷操纵性[M].北京:国防工业出版社,2007.
[2]肖京平,金华.对转桨推进型鱼雷有动力影响研究[J].流体力学实验与测量,2001,15(3):48-53.
[3]何文生.对转螺旋桨推进鱼雷的流体动力特性数值计算研究[D].西安:西北工业大学,2007.
[4]刘志华,熊鹰,叶金铭,等.基于多块混合网格的RANS方法预报螺旋桨敞水性能的研究[J].水动力学研究与进展A辑,2007,22(4):450-456.
[5]张涛,杨晨俊,宋保维.基于MRF模型的对转桨敞水性能数值模拟方法探讨[J].船舶力学,2010,14(8):847-853.
