人在回路中的末制导系统性能测试与评估*
2012-12-10何亚娟符新军
何亚娟,王 萧,符新军
(中国兵器工业第203研究所,西安 710065)
0 引言
对远程红外图像制导导弹来说,导引头能否及时识别目标并对其进行快速稳定跟踪,如何评估末制导系统的性能优劣是深入开展图像制导技术研究的重要方面。图像制导导弹的特点之一就是人在回路中,因此,人在回路中的制导系统设计与性能评估就成为一个必须研究解决的问题。在制导系统设计中,较为复杂的是“人”这个环节的模型建立,而建立人的数学模型是一项复杂而艰巨的工作任务,涉及多种专业和学科,需要做大量的理论研究和试验、统计工作。在现代导弹制导系统设计过程中,虚拟样机已经成为一种普遍应用的辅助设计手段。基于以上情况,如能在虚拟样机基础上构建存在人的作用输入的实时试验系统,将为制导系统的设计与性能评估带来诸多好处,并在研制费用和周期上得到很大程度上的缩减。
1 末制导性能评估试验系统
1.1 末制导性能评估试验系统总体方案
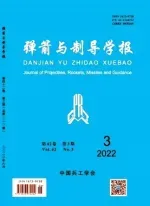
分别建立导引头成像系统模块和导引头稳定与跟踪系统模块的细粒度虚拟样机[1],导引头成像系统虚拟样机包括目标/背景红外辐射模型、大气辐射与衰减模型、传感器模型;集成成像系统和稳定与跟踪系统两个模块,构成完整的图像导引头系统虚拟样机[2];红外图像导引头虚拟样机与导弹动力学运动学模块、导弹控制系统模块、目标运动模块、图像跟踪器试验样机及操控装置试验样机,构成完整的人在回路的末制导性能评估实验系统[3],系统组成原理如图1所示,系统构成与连接关系如图2所示。
图像末制导性能评估试验系统各模块功能与系统工作原理:导弹动力学与运动学模块实时计算导弹的位置与姿态[4],将导弹的姿态信息发送到导引头稳定与跟踪系统模块;导引头稳定与跟踪系统模块根据操控装置、图像跟踪器传来的指令,综合导弹的姿态信息,计算出导引头姿态;导引头成像系统虚拟样机接收导弹位置信息、导引头姿态信息和目标运动模块的目标位置姿态信息,生成导引头当前的输出图像;导引头成像系统虚拟样机输出图像到图像跟踪器/监视器;图像跟踪器计算跟踪指令并输出到导引头的稳定与跟踪系统模块;射手根据监视器上的图像,利用操控装置和图像跟踪器对目标进行手动或自动跟踪;控制系统模块接收导引头稳定与跟踪模块的制导信号,按照设计的制导律,计算控制指令,控制导弹飞行。
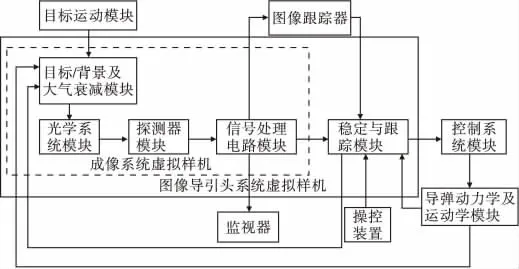
图1 末制导性能评估试验系统工作原理
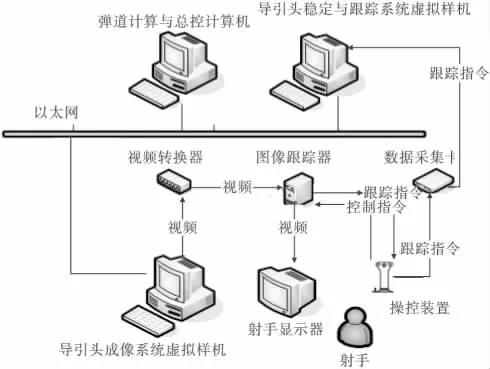
图2 人在回路末制导性能评估试验系统构成与连接关系
1.2 末制导性能评估试验系统建立
构建该试验系统的主要工作内容包括:导引头成像系统虚拟样机建模与验模;导引头稳定与跟踪系统虚拟样机建模与验模;弹道计算与控制系统模型软件实现;虚拟样机、弹道计算机(包括弹道计算与控制模型)与操控装置和图像跟踪器实体样机的集成。其中,高拟真度成像系统虚拟样机和导引头稳定与跟踪系统虚拟样机的建模与验模、大气辐射传输模型的应用以及试验系统集成为关键技术。
要以该试验最大限度地代替飞行试验,前提是试验结果必须正确。试验结果的可信性首先取决于描述实际物理系统动态过程的数学模型的拟真度,其次取决于所构建的试验系统和实际工作环境的逼真度。制导系统基于数学模型的虚拟样机能否真实反映其工作特性,即拟真度是否满足要求,需要寻找合理的内外场试验方法,确定拟真度评价指标,对其进行校验,使数学模型在最大程度上反映其代表的物理部件的性能特性。
2 基于性能评估试验系统的人在回路中的末制导系统性能测试试验
2.1 复杂背景下的目标搜索与识别
导弹在飞行过程中,射手需要通过观看导引头摄取的图像从背景中检索出要攻击的目标,目标识别过程如图3所示,图中的每一个环节和目标在视场中停留的时间都会影响识别结果[5]。在导引头瞬时视场和识别距离受限的情况下,为了增大目标识别概率,通常采用导引头按指定规律扫描的方法,以增大视场或延长目标在视场中的停留时间。
图3 目标电光成像与识别过程
针对背景项目的作战使命和作战使用环境设置试验条件和试验目标,通过观察导引头虚拟视景做识别试验,统计在不同作战环境条件下,采用不同导引头参数、扫描规律和弹道参数时,对不同目标在规定识别距离内的识别概率以及平均识别距离。为背景项目总体方案和导引头方案确定提供参考。
2.2 手动和自动跟踪实验与末制导系统性能评估
在射手识别目标后,需要通过操纵手柄使导引头光轴指向目标,随后可选择转入自动跟踪方式由图像跟踪器产生跟踪指令使光轴指向目标。利用性能评估试验系统通过试验测试的方法评估导弹在不同速度、不同导引率、不同数据链路延迟情况下对不同运动速度和运动规律目标的手动与自动跟踪性能。手动与自动跟踪目标试验现场如图4所示。
2.2.1 手动跟踪试验
对初步设计的制导与控制系统进行手动跟踪试验,通过射手的实际观察评测导弹对目标的跟踪性能。不同的导引头跟踪回路参数和大回路参数引起的视线误差角、过载和弹体姿态角如图5、图6、图7所示。
由图5可以看出,射手能够快速地使视线误差角减小,但不能将目标稳定在视场中心,视线角误差震荡,经分析是由于导引头跟踪回路增益过大,通过减小导引头跟踪回路增益、降低导引头回路带宽来解决导引头的稳定问题。

图4 手动与自动目标跟踪试验
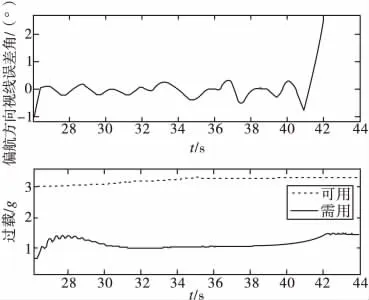
图5 导引回路增益过大时的视线误差角与过载

图6 大回路增益过大时的视线误差角、弹体姿态角和过载
由图6可以看出,在导弹转入比例导引之前,射手能够稳定跟踪目标,转比之后,弹体控制不稳定导致导引头不能稳定跟踪目标,以致脱靶。经分析是由于大回路增益过大引起的,应该通过减小大回路增益解决此问题。
造成脱靶量较大的原因在于视线误差角较早的超过导引头半视场。而此时的横向过载并未超过可用过载,应该通过调整导引头参数和跟踪大回路参数的方法优化导引头和弹体的响应。导引头跟踪回路与大回路综合调整后的手动跟踪曲线见图7。
2.2.2 针对大机动目标的手动与自动跟踪对比试验
在图像跟踪器能够稳定的跟踪大机动目标的情况下,进行相同条件下的手动跟踪实验,发现自动跟踪回路参数不适用于手动跟踪。相同的跟踪回路参数条件下手动与自动跟踪大机动目标对比试验曲线如图8所示。
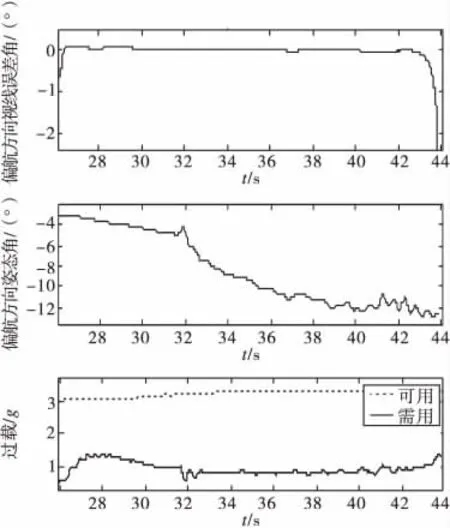
图7 参数综合调整后的视线误差角、弹体姿态角和过载

图8 相同跟踪回路参数时的手动与自动跟踪大机动目标
由此可见,自动跟踪回路与手动跟踪回路必须分别设计。对手动跟踪回路进行了重新调整,调整后,手动可稳定的跟踪蛇形机动目标,调整前后手动跟踪曲线对比如图9所示。
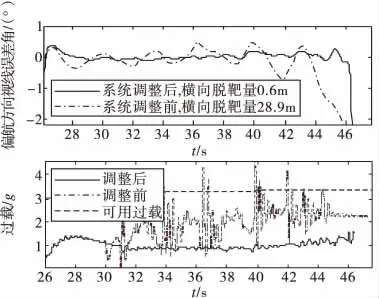
图9 手动跟踪回路调整前后的试验曲线对比
3 结论
由于人的不确定性和非线性,在制导系统设计时,对人的特性必须进行充分的试验和分析。利用虚拟样机技术建立末制导性能评估试验系统,将人的作用以与实际系统相同的方式引入制导回路,通过人在回路中的闭环试验,使得末制导系统的性能评估结果更具有可信性,制导与控制系统的设计更符合实际。利用该试验系统进行试验,对不同设计参数条件下的目标识别与跟踪性能进行直观高效的评估与验证,并有针对性的及时改进系统设计,优化参数,具有其它试验不可比拟的方便性和经济性。为研究图像制导导弹的目标搜索、识别、跟踪和人在回路中的行为特性以及与制导系统参数的匹配性等关键技术问题提供了一个有效途径。
[1]费锦东,刘鹏.凝视红外成像末制导系统应用研究[J].红外与激光工程,2006,35(3):253-257.
[2]陈澄,石静.凝视红外成像制导系统数学建模与仿真技术[J].红外与激光工程,2007,36(1):18-22.
[3]费锦东,梁波,魏宇飞,等.凝视红外成像末制导系统性能测试评估方法[J].红外与激光工程,2007,36(5):589-592.
[4]钱杏芳,林瑞熊,赵亚男.导弹飞行力学[M].北京:北京理工大学学出版社,2000.
[5]付宏明.红外成像末制导系统指标评价方法[J].红外与激光工程,2008,37(4):796- 797.