基于电力线载波通信技术的LED路灯控制系统设计
2012-12-04唐显锭蒋紫东刘木清
朱 旭 唐显锭 蒋紫东 徐 峰 冯 辉 胡 波 刘木清
(1.复旦大学电光源研究所,先进照明技术教育部工程研究中心,上海 200433;2.复旦大学电子工程系,数字信号处理与传输实验室,上海 200433)
1 引言
LED作为第四代照明光源,近几年得到了巨大的发展,其光效等性能指标快速提高而价格快速下降,已经突破了显示、景观照明等常规的应用领域,在道路照明等定向照明中应用得越来越多,越来越具有竞争力[1]。
目前我国路灯控制系统主要采用定时控制的方式,一般定时器会有冬夏两种定时模式。这种方式可以实现路灯的定时自动开关,但缺点在于设定的时间不能调整,季节变化时会出现开关灯时间与昼夜变换时间不匹配的现象,也无法对路灯状态进行监测。
与传统光源相比,LED具有节能和易于控制两大显著特点,而现有的路灯控制系统显然无法将这些优点体现出来。因此,针对LED路灯,有必要重新设计与之配套的智能路灯控制系统。本文将介绍基于电力线载波通信技术的LED路灯控制系统的设计,该系统依托现有路灯网络,无须重新布线,使得改造成本最小化,并能够实现对LED路灯的远程控制开关,调光,查询电流及电压等功能。
2 系统组成
整个智能控制系统架构如图1所示,主要包括了上位机 (PC),集中控制器 (ECC)及由载波通信模块 (TN)和控制终端 (MCU)组成的单灯控制器三大模块,采用PC与ECC间的GPRS通信,ECC与单灯控制器间PLC通信的两级通信机制。其中集中控制器和载波通信模块,我们选用了瑞斯康公司的ECC3001和RISE3501芯片。本文主要涉及单灯控制器和上位机程序的设计。

图1 基于电力线载波通信技术的路灯控制系统架构
3 单灯控制器设计
单灯控制器主要由载波通信模块和MCU电路组成。载波通信模块内含有集成电路芯片RISE3501。RISE3501是一款专用于电力线载波通信的单片系统芯片。
3.1 载波通信模块外围电路设计
载波通信模块的工作还需要外围电路的支持,下面介绍配合载波通信模块工作的外围电路。
3.1.1 载波信号耦合电路
如图2所示,输入端L线上串有一个0.22μF/275V聚酯电容,用来隔离50Hz交流电和通过有用的高频载波信号。并有一个1∶1耦合线圈 (2.2mH)以传输有用的载波信号,同时起到隔离高压作用,让大部分高压降在聚酯电容上,使后面的电路不带高压以保护人身安全。TVS-8.5V(瞬变二极管)防止快速冲击,保护后端电路。

图2 载波信号耦合电路
3.1.2 看门狗电路
通信模块定时给出看门狗输入信号WDI给看门狗芯片,若WDI信号停止,看门狗芯片通信模块进行复位,电路如图3所示。
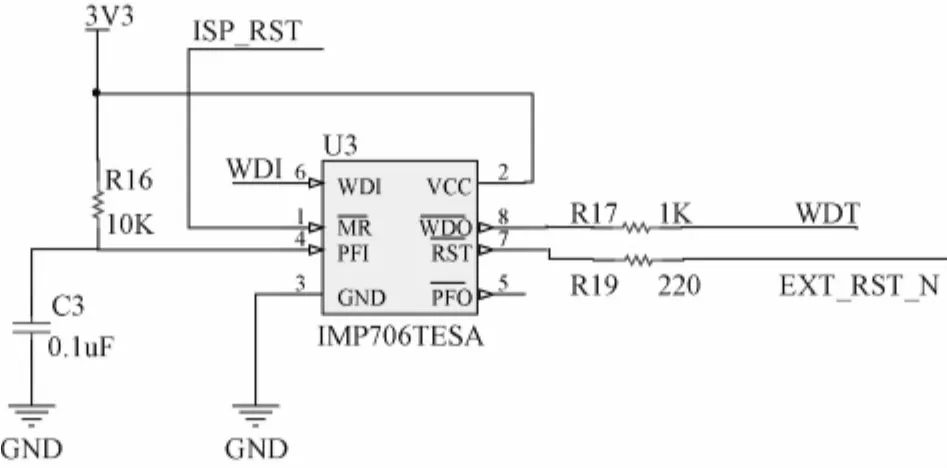
图3 看门狗电路
3.1.3 过零检测电路
如图4所示的过零检测电路正过零导通,过零检测用于通信模块判断相位。

图4 过零检测电路
3.2 MCU电路设计
MCU的工作流程图如图5所示,MCU与载波通信模块之间通过串口进行通信。载波通信模块将接收到的上位机命令发送给MCU,MCU进行相应的处理后再将响应结果返回给通信模块。
MCU采用的是silicon公司的c8051f330单片机,通过MCU电路实现的功能包括灯的开关控制,火线电压及灯上电流的测量,以及MCU输出PWM信号对灯进行调光等。

图5 MCU程序流程图
3.2.1 灯开关控制
对路灯的开关控制通过继电器来实现。继电器接5V电源,继电器的通断由MCU的RELAY信号进行控制。电路如图6所示。
3.2.2 电流与电压测量
电流测量的电路如图7所示,其原理是在接入路灯的火线上串上一个电流互感器 (线圈比4∶500),在次级得到与线圈比相反的电流,在R10上得到相应的电压信号。经运放LM358放大10倍,同时由于D1和D4的作用反向电压被削去。经过运放的信号CURRENT接到MCU上进行AD采样,通过测量信号峰值计算电流互感器初级电流。AD以每个市电周期50个点的速度采集数据,取其中最大的一个作为信号的峰值。为了减小噪声的影响,每次测量均测得几十个周期的峰值进行平均 (MCU程序中发送给PC的是几十个峰值的和,PC机程序计算平均值)。设电流互感器初级的电流有效值为I,那么此电流I和MCU测得的信号峰值的关系为:

图6 灯开关控制电路

为了使测量更准确,R7,R9,R10均需使用精密电阻,否则需在MCU端做一定的补偿校正。

图7 电流测量电路
电流互感器如果要满足电流比等于线圈在数比的反比,负载电阻R10则需要尽可能的小,然而此处若R10过小,会导致R10上电压信号过小,使得噪声影响很大,所以此处R10取值为51欧,由此带来的误差是线性的,可在PC端进行校正。调试中得到的真实、测量以及校正后的电流如图8所示。
校正后的公式为:

图8 电流校正对比
校正后测量值 =1.365×校正前测量值-141.3(mA)
电压测量的原理与电流测量完全类似,变压器并联在电源线上,MCU测量计算的方法与电流测量完全相同。同样,为了测量准确,R21、R25和R26需要用精密电阻。不过电压测量不存在电流测量中需要校正的问题。电路如图9所示。

图9 电压测量电路
3.2.3 PWM输出电路
单片机的PWM信号经三极管驱动,再经光耦隔离后接入LED路灯驱动器的PWM输入口,实现调光功能。电路如图10所示。
4 上位机程序设计

图10 PWM输出电路
我们使用QT4.7开发上位机程序,Qt是一个跨平台的C++应用程序开发框架,具有优良的跨平台特性、面向对象、丰富的API、大量的开发文档等优点[2]。我们可以把它看成是一个第三方的C++的类库,提供了丰富了API。在本设计中,我们主要用到了GUI和网络功能的类库,程序共由6个类组成,如表1所示。

表1 上位机程序内容
上位机程序主要工作流程为:
1)上位机发送命令基本流程:
a)在MainWindow上,用户选择相应命令;
信度指测量结果的一致性、稳定性以及可靠性,一般多以内部一致性系数(Cronbach’ α)来检验。如表1所示,各构念的Cronbach’ α系数的变动范围在0.919~0.951之间,均大于0.7,因而可以说研究中采用的量表具有较好的信度。另一方面,构念的组合信度(CR)也是判别内在质量的标准之一,各构念的CR值均在0.60以上,表示量表的内在质量理想。
b)命令传递给Server,Server按要求填写相应帧格式,并选择相应的Socket写入命令;
c)Socket发送命令给相应的集中器。
2)上位机接收响应基本流程:
a)Socket接收响应,判断命令合法性;
b)Server接收响应,翻译响应的内容,根据这些内容修改Ecc,Tn,Task的状态信息;
c)MainWindow根据Ecc,Tn,Task的状态信息,更改图形界面的显示内容。
3)命令没有及时响应的判断:
a)发送命令时,Server根据命令修改Ecc的工作状态;
b)Ecc开始计时,这里选择60s。如果是组播或者广播,则计时为60s*节点个数;
c)接收对应Ecc工作状态的响应时,计时停止。如果一直没有响应,则界面显示超时。
5 试验结果
根据以上设计,我们在实际道路上安装了一个集中控制器和8个单灯控制器,LED路灯间距为30米。在实际电网环境中连续测试了6天,通过上位机与最远的第8个控制器进行通信,来验证系统的通信成功率和稳定性。
表2是本次的测试结果,通信成功率稳定在94%左右,灯的开关、电压及电流测量、定时控制、调光等各项功能均能正常实现。在实地试验中,8个路灯的总响应时间在4~5秒左右,在可接受的范围内。

表2 通信成功率试验结果
6 总结
基于专业的电力线载波模块和集中控制器,本文设计了完整的LED路灯控制系统。通过实地试验,初步验证了该系统的可靠性和稳定性,可以适用于实际的道路照明中,为后续大规模应用打下坚实的基础。
[1]朱旭,张震,刘木清.青岛胶州湾隧道照明应用的研究与实践.照明工程学报,2010.21(z1):57~60.
[2]陈靖,王振宇.Linux平台上的组件开发技术.计算机与数字工程,2005.33(5):25~28;68.
[3]朱吉佳,蔡家麟.基于Qt的业务监控系统界面设计与实现.计算机技术与发展,2008.18(3):236~239;242.
