基于横摆力矩分配的车辆稳定控制研究
2012-12-03张思奇张天侠周淑文
张思奇 张天侠 周淑文
东北大学,沈阳,110819
0 引言
车辆稳定控制系统(vehicle stability control systems,VSC)因其能够防止车辆发生激转、漂移以及转向不足等危险情况而日益受到人们的重视并逐渐被商业化[1-3]。这类稳定控制系统也经常被称为横摆稳定控制系统(yaw stability control systems,YSC)、电子稳定控制系统(electronic stability control systems,ESC)和电子稳定程序(elec-tronic stability program,ESP)。车辆稳定控制系统的作用就是修正车辆横摆角速度因各种原因而发生的偏差,使车辆尽可能恢复到正常运动,以便车辆能够按照驾驶员所期望的路径行驶[4-5]。
目前车辆稳定控制系统主要是采用差动制动的方法,即在不同的车轮上分别施加不同的制动力,以便产生一个附加横摆力矩,从而让跑偏的车辆恢复正常行驶。通常的控制策略是,当车辆发生不足转向时,则在后内轮上施加一定的制动力,当发生过度转向时,则在前外轮上施加相应的制动力,这种控制经常是交替执行,快速切换的。这类系统通常还包括对节气门的控制从而降低发动机的输出扭矩。
这种控制方法的优点是,当车辆遇到危险工况时可以有效地避免事故的发生。比如在高速公路上行驶,如果前方车辆突然减速、停车,或者有散落物,则在躲避障碍的同时,车速也有一定的下降,这种控制方法非常有利于躲避障碍。
然而,这种车辆稳定控制系统有一个明显的不足:当需要加速超车时,即使车辆能很好地按照期望的路径行驶,但由于车速下降,超车的距离势必会延长,降低了驾驶的乐趣。本文试图研究一种车辆稳定控制策略,即同时兼顾安全和驾驶动感,在需要加速转向超车时,采用驱动力分配方法;在紧急避障时,采用差动制动方法,从而使得车辆稳定控制系统适用于更为复杂的工况[6-7]。
1 车辆动力学分析
目前车辆稳定性控制研究主要是基于二自由度理论模型,忽略悬架、车身、传动系,只考虑横摆运动、纵向运动和Z轴转动惯量对车辆转向的影响,而忽略了前倾运动和侧倾运动对车辆转向的影响。根据汽车理论相关知识可以得出二自由度汽车的运动微分方程式:
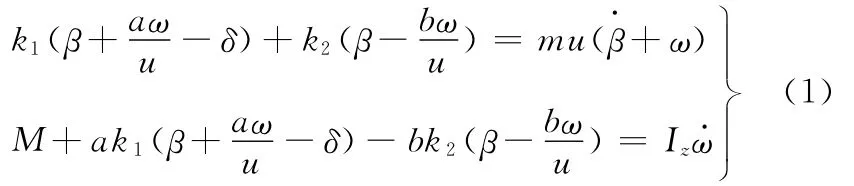
式中,a、b分别为质心到前后轴的距离;m为车辆质量;k1、k2分别为前轮、后轮等效侧偏刚度;β为车辆质心侧偏角;ω为车辆横摆角速度;Iz为Z轴的转动惯量;δ为前轮转向角;u为车速;M为横摆力矩。
对式(1)进行整理,并令状态向量xT=(ω,β),输入向量uT=(δ,M),可得状态空间表达式:

其中,A为系统矩阵,B为输入矩阵,矩阵中的元素分别为

对于理想的二自由度车辆模型,由于假设路面和轮胎之间附着条件足够好,故理想的横摆角速度为[8-9]

根据式(3),可以求中性转向时车辆的理想横摆角速度,它仅与车速和前轮转角的大小有关。在车辆稳定控制系统中,通过控制制动力矩和驱动力矩即横摆力矩M的大小来控制实际的横摆角速度,并将其与理论横摆角速度相比较。根据比较结果采取相应的控制策略。
2 车辆稳定控制策略
车辆稳定控制系统是在制动防抱死系统(anti-lock braking system,ABS)和牵引力控制系统(traction control system,TCS)的基础上发展起来的。除了轮速传感器外,该系统一般还包括方向盘转角传感器、车身横摆传感器。在本文设计的稳定控制系统中,还将用到节气门开度信号、制动踏板信号,在实际的应用中,可以通过总线技术实现共享。
控制系统不断地将实际横摆角速度和理想横摆角速度进行比较,满足下面两个条件时稳定控制系统将被启动:

式中,ωr为车辆实际横摆角速度;Tω为横摆角速度阈值,Tω经多次仿真试验最终取为0.05rad/s。
式(4)确保只有在车辆实际横摆角速度与期望横摆角速度符号(矢量方向)相同时,稳定控制才被启用。式(5)防止在正常行驶时实际横摆角速度与期望横摆角速度的差值很小的条件下控制系统被启动。
(1)稳定控制系统被启动后,如果检测到节气门位置传感器输出的电压在2.5~4.5V之间,则认为驾驶员要加速超车,这时启动驱动力分配系统子程序来调节驱动轮左右两侧的驱动力大小。根据实际横摆角速度与期望横摆角速度相比较后的误差来进行驱动力分配控制,主要是调节两侧驱动力所占总驱动力的百分比,采用阶梯式方式增大一侧驱动力,同时相应地减小另一侧驱动力,从而使实际横摆角速度接近期望横摆角速度。如果在驱动力调节的过程中,电子控制单元检测到实际横摆角速度与期望横摆角速度差值大于设定的某个阈值,则启动后轮差动制动,如图1所示;如果横摆角速度大于设定的阈值上限,则自动关闭节气门,对4个车轮进行差动制动,以使实际横摆角速度尽快恢复正常。

图1 稳定控制原理示意图
(2)稳定控制系统被启动后,如果检测到制动踏板被踩下,则启动差动制动进行横摆角速度跟踪控制,这时仅限于对2个后轮进行调解。如果横摆角速度大于设定的阈值上限,则4个车轮同时进行调解。具体是,如果是过度转向,则外侧车轮同时进行制动;如果是不足转向,这时需要根据前轮的转角判断前轮是否和后轮一起进行制动。
车辆稳定控制策略流程如图2所示,图中,Tb、Tt分别为差动制动时横摆角速度阈值和驱动力分配时横摆角速度阈值。
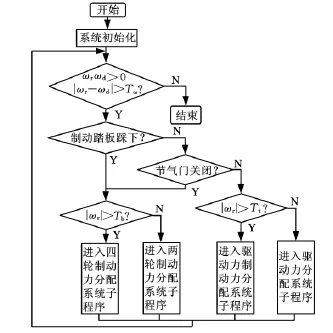
图2 车辆稳定控制策略流程图
3 车辆稳定控制仿真
根据上述稳定控制原理分析,采用动力学分析软件ADAMS/Car进行建模,建立了全功能车辆多体动力学模型,包括发动机、传动系、悬架、轮胎、制动系、转向系、车身等子系统。采用Simulink进行联合仿真,所有的控制算法包括驱动力分配和制动力分配控制都在Simulink中实现。仿真所针对的车辆的主要参数见表1,多体动力学模型如图3所示,联合仿真控制模型如图4所示。

表1 车辆参数

图3 车辆虚拟样机模型

图4 车辆稳定控制联合仿真
4 仿真结果分析
根据对车辆高速超车和紧急避障工况的分析,可将其近似归结为急促移线行驶,试验工况如下:车道宽度12m,从左侧移线入口,车速为140km/h,汽车进入通道后,前进车速尽量保持不变,双移线期望运行路径如图5所示。仿真计算得到的结果如图6、图7所示。
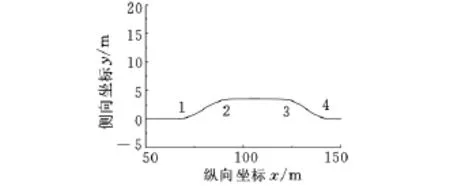
图5 双移线期望路径

图6 横摆角速度对比

图7 运动轨迹比较
图6所示为有无启动车辆稳定控制系统时的车辆横摆角速度,图中的理想横摆角速度是根据式(3)计算出来的。从图6不难发现,在进入第1个弯道时,前轮的侧向力饱和,达到路面附着力极限,控制系统没有被启动,车辆发生轻微的漂移;进入第2个弯道时,稳定控制系统启动,调节两侧驱动轮的扭矩,由于提供了一个附加的横摆转矩,故横摆角速度有一定的减小。没有稳定控制系统(未启动)的车辆在这个区间将变得极不稳定,最后由于后轮侧向力超过了路面附着力极限而发生了激转。装备了稳定控制系统的车辆能够很好地按照驾驶员的期望路径行驶,如图7所示。
5 结论
(1)对车辆高速超车、避障过程进行了分析,采用基于制动力和驱动力分配的方法对车辆稳定控制策略进行设计。
(2)应用虚拟样机技术建立了车辆多体动力学模型,采用联合仿真的方法对控制策略进行仿真验证。双移线仿真结果表明,采用本文提出的车辆稳定控制系统可以使车辆尽可能地按照驾驶员的期望路径行驶,同时还能保持驾驶的动感和乐趣。另外在仿真中也发现,过高的车速会降低车辆稳定控制系统的使用效果。
[1]Wong J Y.Theory of Ground Vehicles[M].Singapore:John Wiley & Sons Inc,2001:102-126.
[2]Yi K,Chung T,Kim J.Closed-loop Evaluation of Vehicle Stability Control(VSC)Systems Using a Combined Vehicle and Human Driving Mode1[J].SAE Technical Paper Series,2004-01-0763,2004.
[3]Wang H Y.Modelling and Simulation of Electric Stability Program for the Passenger Car[J].SAE Technical Paper Series,2004-01-2090,2004.
[4]赵治国,方宗德,黄英亮,等.车辆动力学稳定性系统变结构滑模控制研究[J].中国机械工程,2003,14(2):152-156.
[5]Kretschmer M,Neubeck J.Combining Vehicle Dynamics Control and Decision Making Procedures Towards Safe Overtaking Maneuvers[J].SAE Technical Paper Series,2005-01-0412,2005.
[6]Damrongrit P,John G,Qinghui Y,et al.Dynamic Modeling of Torque-biasing Devices for Vehicle Yaw Control[J].SAE Technical Paper Series,2006-01-1963,2006.
[7]Damrongrit P,Jae Y L,Rajesh R.On the Use of Torque-biasing Systems for Electronic Stability Control:Limitations and Possibilities[J].IEEE Transactions on Control Systems Technology,2007,15(3):581-589.
[8]Rajamani R.Vehicle Dynamics and Control[M].New York:Springer,2006:221-249.
[9]Bonnick A.Automotive Computer Controlled Systems[M].Oxford:Butterworth-Heinemann,2001:9-28.
