低空无人机航测1∶1000地形图
2012-11-29林莉黄昶
林莉黄昶
(四川省遥感信息测绘院,四川成都 610100)
随着固定翼轻型低空无人飞机技术的发展和GPS自动驾驶技术的运用,利用无人飞机进行应用于测绘的航空摄影成为现实。无人飞机体积小巧,机动灵活,不需专用跑道起降,受天气和空域管制的影响很小,能够在极短的时间内快速获取影像。研究利用无人飞机获取的航空影像进行地形图测绘,对影像获取困难地区以及需要快速成图的地区有着重要的现实意义,其快速、现时性强等特点,将在城市规划、数字城市建设、国家应急救灾、地理国情监测和新农村测绘保障等方面发挥积极的作用。
1 低空无人飞机航摄系统
1.1 系统硬件
硬件系统由五部分组成:无人机飞行平台、传感器(数码相机)、飞控系统、地面监控系统与遥控器以及地面运输与保障系统。
无人机飞行平台:无人机由机体、操纵系统、动力系统三部分组成。
传感器:航摄用传感器配备佳能5D markⅡ定焦数码相机,焦距分别为35 mm和24 mm。相机像素大小为6.4μm,像幅大小为5 616像素×3 744像素(2 100万像素)。
飞控系统:飞控采用自动驾驶仪UP30,它高度集成了GPS接收机、气压传感器、空速传感器、飞行控制系统等部件,可以稳定控制各种气动布局的中低速无人机,实现导航、定位和自主飞行。
地面监控系统与遥控器:地面监控系统包括地面监控工作站(联想便携式计算机)、UP30飞控软件、电台和天线。其中在UP30飞控软件中设计编辑航线和航路点,能够实时修改无人机的飞行姿态和目标航点,同时可实时显示无人机的各种飞行参数和电池电压。所有这些数据均通过电台和天线与无人机进行通讯。遥控器是手动控制无人机飞行的远程控制设备,技术娴熟的操控手利用遥控器可以实现无人机滑跑起飞和降落。
地面运输与保障系统:地面运输与保障系统配有一辆汽车,可长距离装载运输无人机设备。另外还配有警示筒、警示衣、警示绳等安全保障设备。
1.2 配套软件
包括曝光点设计软件、航摄质量快速检查软件、影像预处理软件。
2 地形图航空摄影测量
项目位于四川绵阳某地,是关于火车站扩建的1:1000规划用图,前期计划使用全野外测图并已经开展,但工期甚急,无法满足10天完成10 km2的要求。测区地形类别为丘陵,平均高程约520m,交通较发达,宝(鸡)成(都)铁路纵穿其内,农村居民地零星分布较多,面积约10 km2。
甲方提供绵阳2000坐标系、1985国家高程基准的CORS参数及账号,成图亦采用绵阳2000坐标系,1985国家高程基准。
工艺流程如图1所示。
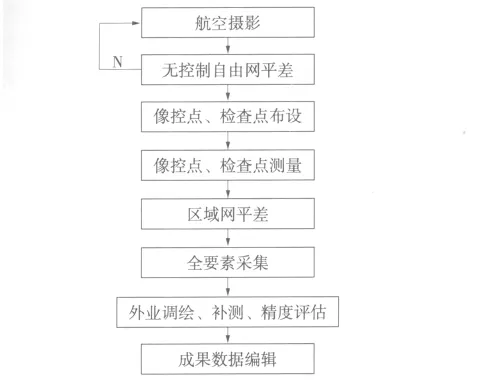
图1 工艺流程
2.1 航空摄影
使用数码相机航摄时,航线设计以GSD(地面分辨率)为出发点,先由成图比例尺确定GSD,进而确定航高。在高差较小的地区航摄时,成图比例尺与GSD的对应关系如表1所示。
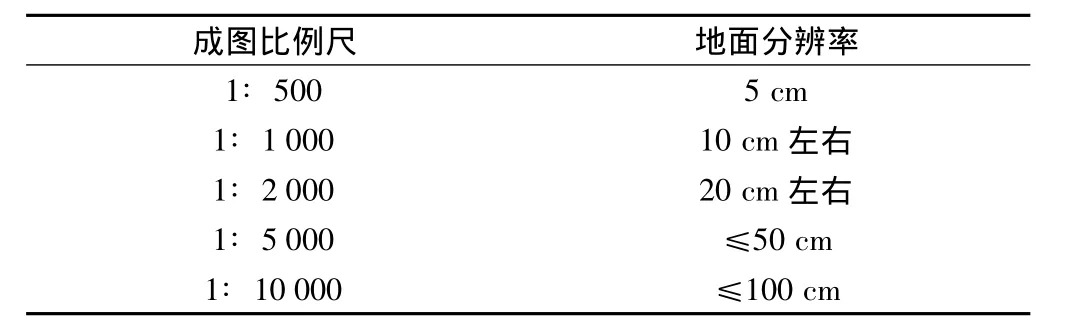
表1 地面分辨率对应
本次航摄采用35 mm焦距的数码相机,其焦距和像元尺寸是确定的,航高与地面分辨率有关,它们存在以下比例关系

上式中f为焦距(35 mm),H为航高,&为像元尺寸(6.4μm),GSD为地面分辨率。
根据以上公式可计算出本次航摄的相对航高约为550m,绝对航高1 070m。
根据航测规范要求,本次航摄航向重叠度设定为65%,旁向重叠度设定为35%,按照计算的航高和重叠度、地面分辨率等参数,输入航线设计软件,计算曝光点坐标,并可确定本次航摄的航线数、相片数、基线长度、旁向间距、总航程等参数。
天气允许即可进行航摄,本次摄影时间为2011年1月4日,获取影像参数见表2。
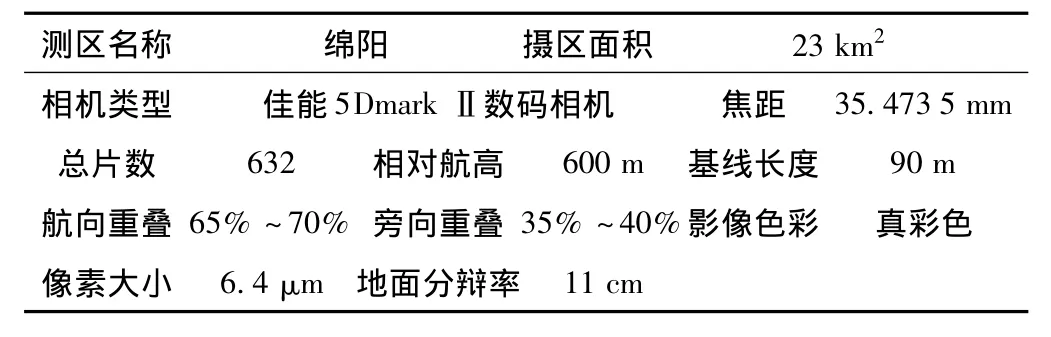
表2 影像参数
2.2 像片控制
(1)布点方案及要求
本次航摄为南北飞行,根据《航外规范》的要求,该区域外业按6条基线逐航带布设平高像控点,并在测区铺装路面布设高程点以检查加密和成图的高程精度。
像控点尽量选在平房房角、道路行车线、斑马线、花台角、影像小于0.2 mm的点状地物中心等明显的地方;若确无明显地方,可分开布设平面、高程控制点,但不能选在人字顶房角、有草丛的田埂、有弧度的田角等,当布设的点高于地面时,还应提供该点至地面的比高。
(2)像片控制点及检查点的施测
本次像片控制测量采用绵阳市CORS系统,根据提供的参数直接获取绵阳2000坐标和1985国家高程。像控点采用电子刺点,现场对点位照相并制作点位信息表供内业加密使用。
像控点测量主要技术要求应符合表3的精度规定。

表3 像控点精度规定
本次共测量了113个像控点、135个检查点。
2.3 内业加密
进行区域网空中三角测量平差前,需对经畸变差改正后的原始航空影像进行无控制自由网平差,如果相对定向误差不大于2/3个像素,像点收敛值不大于2/3个像素,则该原始航空影像畸变差改正正确,可开展后续工作。
利用VirtuoZoAAT 3.5空三加密软件进行无人机航空影像区域网平差,精度情况见表4。
表4中平面限差、高程限差为《数字航空摄影测量空中三角测量规范》对1:1000丘陵的精度要求。

表4 区域网平差精度 m
测区有部分外业全野外测绘1:1000地形图数据,为了进一步检测高程精度,将图内内已有外业实测高程点导入立体模型检测立体模型高程精度,精度情况见表5。
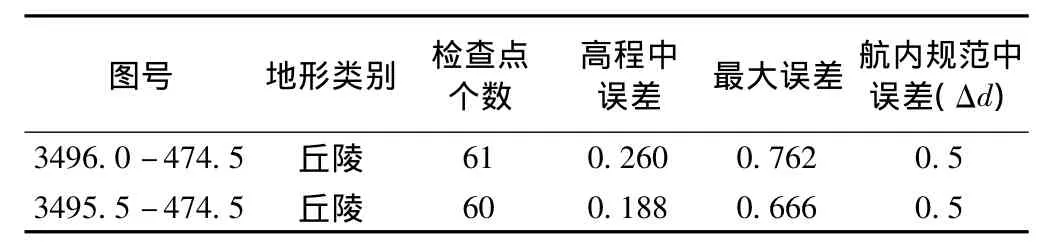
表5 高程精度检测 m
2.4 一体化成图
采用“内业数据采集—外业调绘编辑一体化”的技术路线。首先利用全数字空中三角测量成果恢复立体模型,并对相对定向、绝对定向进行检查,再根据《内业规范》、《图式》及《代码》采集地物、地貌要素,并在进行简单编辑并打印,外业根据打印图纸和测图数据,根据《外业规范》进行外业修测、补测、调绘,采用电子清绘与编辑一体化作业,经100%两级检查后提交成果
调绘的基本内容包括:①对内业采集的所有要素进行定性;②补测、补调隐蔽、新增和采集遗漏的地物;③进行屋檐改正及重要地物的精度检核等工作;④纠正内业采集错误的地物;⑤实地注意调注地理名称、实体属性内容等,做到地理景观不失真,各地理要素关系协调、合理;⑥平面和高程的精度检测。
清绘编辑的基本内容包括:①将调绘的各类属性上图;②导入全野外采集的新增、遗漏、补测的地物;③进行房檐改正以及新增的距离交会地物;④修改外业发现的采集错误并将地理名称上图;⑤按照图式处理编辑各类图形关系并配置符号;⑥整饰图幅并接边。
2.5 成图精度评估
根据规范要求,丘陵地区1:1000地形图明显地物点对最近野外控制点的平面点位中误差不得大于图上0.6 mm(实地0.6m),最大平面误差为2倍平面中误差。高程注记点对最近野外控制点的高程中误差不得大于0.5m,等高线对最近野外控制点的高程中误差不得大于0.7m,最大高程误差为2倍高程中误差。
抽样对一幅样本图幅进行了精度检测,按照像控点精度采集了69个平面检查点和44个高程检查点进行成图精度检测,完全满足规范要求。成图精度情况见表6。

表6 成图精度检测 m
3 结论
利用固定翼轻型低空无人飞机航摄测绘1:1000地形图在丘陵或者山地完全能够满足规范的精度要求,其平面精度优于高程精度,根据常规航测的经验,在平坦地区是否满足高程精度还需要更多的试验进行验证。
本项目从航飞开始到上交成果只用了10天时间,是全野外测图效率的10倍以上,这对快速获取中小面积规划用途或者应急用图具有十分明显的优势。
[1]GB/T 7931—2008 1:500 1:1000 1:2000地形图航空摄影测量外业规范[S]
[2]GB/T 7930—2008 1:500 1:1000 1:2000地形图航空摄影测量内业规范[S]
[3]GB/T 23236—2009 数字航空摄影测量 空中三角测量规范[S]
[4]CH/T 1009—2010 全球定位实时动态(RTK)测量技术规范[S]
[5]GB/T 20257.1—2007 国家基本比例尺地图图式第1部分1:500 1:1000 1:2000地形图图式[S]
[6]张祖勋,张剑清.数字摄影测量[M].武汉:武汉测绘科技大学出版社,1996
