异步电机控制方法对比分析
2012-11-29胡利民
胡利民
(辽宁铁道职业技术学院,辽宁 锦州 121000)
近些年来,随着电力电子、计算机控制以及矢量控制等技术的不断发展,交流调速获得了巨大的技术支持,交流调速系统已经取代了直流调速系统[1]。交流异步电机调速控制系统大致可分为两大类,一类是标量控制系统,主要是变频调速系统,包括恒压频比控制和转差频率控制。另一类是矢量控制系统,包括转子磁场定向矢量控制、转差频率矢量控制、直接转矩控制和无速度传感器矢量控制。
1 标量控制
1.1 恒压频比控制(V/f)
交流异步电机调速时,总是希望保持每极磁通量Φm为额定值不变,这样铁芯才能工作在最经济状态。电源频率和电机极对数决定异步电动机的同步转速,即在改变电源频率时,可以改变电机的同步转速,这时只有控制电源电压与变化的频率的比值为恒定(V/f恒定),才能确保电动机的磁通Φm基本恒定。电动机定子的感应电动势

式中Eg—气隙磁通在定子每相绕组中感应电动势有效值;
f1—电源频率;
N1—定子每相绕组串联匝数;
kN1—基波绕组系数;
Φm—每极气隙磁通量。
由式(1)可知,在控制电动机频率时,保持Eg/f1恒定,就可以维持磁通恒定。有三种不同方式的电压—频率协调控制。
(1)恒压频比U1/f1控制,U1为定子端电压,这种方式最容易实现,能够满足一般调速要求,其缺点是低速带载能力差,需要对定子压降进行补偿。
(2)恒Eg/f1控制,Eg是气隙磁通在定子每相绕组中感应电动势,它以对恒压频比实行电压补偿为目标,稳态调速性能优于恒压频比U1/f1控制。这种控制方式的缺点是机械特性非线性,产生转矩的能力不强。
(3)恒Er/f1控制,Er是气隙磁通在转子每相绕组中感应电动势,这种控制方式可以得到和直流励电动机一样的机械特性,从而使高性能调速得以实现。但是它的控制系统比较复杂。
以上的电压—频率协调控制都是基于异步电机稳态模型的控制方案,多用于动态性能不高的场合。而且是在基频以下进行的恒转矩调速,如在基频以上则采用电压恒定只提高频率的恒功率弱磁调速[2]。
1.2 转差频率控制
前面所述的电压—频率协调控制可以满足一般平滑调速要求,但是其动、静态性能差,电力拖动自动控制系统大都服从基本运动方程式

由上式可知,控制电磁转矩Te就能控制dω/dt,也就是速度的变化率,就能提高系统的动态性能。
电动机稳态运行时,如果s很小,可以得到电磁转矩的近似关系式

上式表明,保持气隙磁通Φm不变,异步电机的转矩就近似与转差角频率ωs成正比。也就是说,控制异步电机中的ωs就相当于控制转矩,就和直流电机中控制电流来实现控制转矩一样。
转差频率控制的规律是在ωs≤ωsm的范围内,按照式

控制定子电流,就能保持气隙磁通Φm恒定,电磁转矩Te基本上与ωs成正比。
转速闭环转差频率控制的交流调速加、减速平滑,系统容易稳定,而且动态调节过程快,系统无静差。基本上具备了直流电机双闭环控制系统的优点,应用前景广泛。但实际转差频率控制系统还不能完全达到直流双闭环系统水平,主要原因有以下几个方面[3,4]:
(1)只有在稳态时按照(4)式控制定子电流才能保持磁通Φm恒定。而在动态过程中,Φm肯定不恒定。
(2)如果按照(4)式推导出只控制定子电流幅值,不控制相位,转矩动态过程变缓,另外函数发生器还存在一定的误差。
(3)系统很大程度上依赖于转速检测信号的精度,很小的转速误差会产生很大的转差频率误差。
2 矢量控制
2.1 转子磁场定向矢量控制(FOC)
其基本控制框图如图1所示,由框图可以看出此系统是一个双闭环系统,其中最关键的环节就是转子磁链幅值和相位的观测。
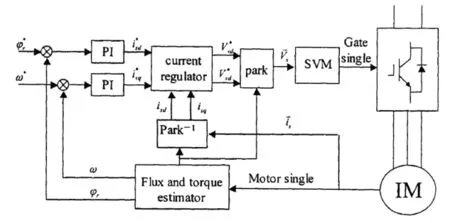
图1 转子磁场定向矢量控制系统框图
转子磁场定向控制相对于标量控制的优点:
(1)实现了转矩和磁通的解耦控制,使其动态性能与直流电机的调速性能差不多。
(2)在宽广的调速范围内能保持磁通恒定。能够抑制较大的暂态电流。
(3)可在电动机状态、反制动状态以及磁弱状态进行高效的转矩控制。
转子磁场定向矢量控制的缺点:
(1)转子时间常数对转子磁通估计影响较大,另外转子磁通估计还受温度、频率等因素的影响,因此要作出精确的估计是很困难的。
(2)设计合适的PI调节器很困难,电机模型参数影响其设计是否合理。
2.2 转差矢量控制
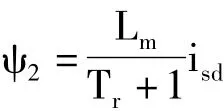
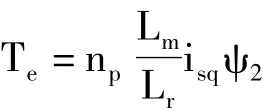
转差矢量控制是一种间接磁场定向控制,其系统框图如图2所示,在保证转子磁链的大小恒定不变的前提条件下,电机的转矩和转差频率成比例,相应的控制方程为:
根据所需要的转矩推算出相应的转差角频率和计算动态过程中为保持转子磁链相位不变的附加转差角频率,并测出电动机转子的角速度,以三者之和的积分进行磁场定向。其优点是不需要实际计算转子磁链的幅值和相位,不需要进行繁琐的坐标变换,调速范围宽。由于转差频率间接矢量控制并没有实现转子磁场的真正闭环控制,ωs和转子磁链间又存在着很强的耦合关系,动态性能比较差。
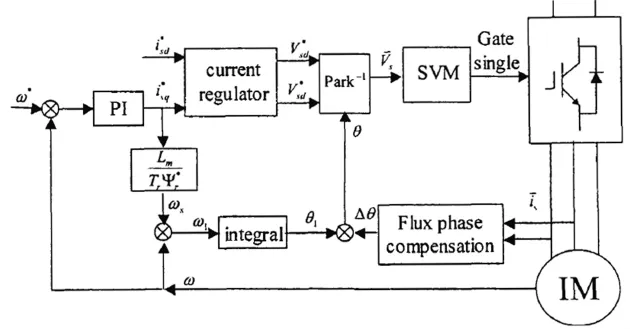
图2 转差矢量控制系统框图
2.3 直接转矩控制[5](DTC)
直接转矩控制是一种基于电机定子变量的直接控制的非线性控制方式,并被看作与FOC并列的控制策略。直接转矩控制技术直接在定子坐标系下计算与控制交流电机的转矩,采用空间矢量分析方法,利用定子磁场定向,借助于离散的两点式调节(Bang—Bang控制)产生PWM信号,直接对逆变器的开关状态进行最佳控制,瞬时控制电动力矩和定子磁通幅值。其基本的控制框图如3图所示。其中Cφ、CT为迟滞比较器的输出,由此检测开关状态,发出脉冲信号。
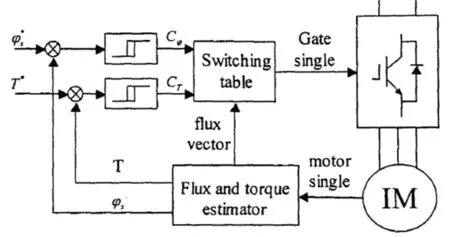
图3 直接转矩控制原理框图
直接转矩控制的优点:
(1)控制算法简单,硬件易实现。只受电机模型Rs参数影响,鲁棒性好。
(2)逆变器件的开通和关断进行综合控制实现最小的开关频率,减小了器件损耗。
(3)不需要旋转坐标变换对电机模型进行解耦,计算简单。
(4)直接以转矩作为被控量,响应迅速,可以实现无超调的高动、静态性能。调节滞环调节器的环宽可以控制转速波动范围。
直接转矩控制的缺点:
(1)逆变器的开关频率在滞环调节器固定环宽的影响下,取决于电机转速和负载转矩,因此可能引起噪声,EMC以及电机转矩脉动。
(2)转矩的频谱包含了大量的不可预测的谐波,这可能导致机械共振和失误。
(3)由于开关频率在极低速时可能下降到十几Hz,会产生较高的声频噪声,低速时转矩和磁通控制困难。
(4)无法对电流进行直接控制,具有大的电流纹波,在电磁兼容性能不好。
(5)在相同的采样频率下,转矩纹波通常都会比采用PWM控制方式的多。
(6)开关器件的结温相比与采用PWM技术而言很难预测,影响功率变换器的设计。
2.4 无速度传感器矢量控制[6,7]
无速度传感器的高性能异步电动机调速系统是在常规带速度传感器的控制基础之上发展起来的。其控制的核心就是转速信号的观测,获取转速信号的方法基本上有以下三条思路:
(1)基于电动机数学模型计算转速
这种思路主要包括两种方法进行转速计算,一种是基于转子反电动势估计法,另一种方法是基于转子磁通计算转速,这两种方法主要优点是算法简单、直观性强,速度估计实时性较好。缺点是基于开环工作状态的估测,精度不高。对电机参数比较敏感,抗干扰能力差。
(2)基于PI闭环控制作用构造转速信号
这种思路利用PI闭环控制构造转速,包括转矩电流或转子磁通的误差项,通过自适应控制器去调整这个误差项以获取转速信息。这种无传感器控制系统共同的优点是:自适应调节能力强,算法简单易行。其缺点是:PI调节器调节能力有限,辨识精度受磁链观测性能影响较大。动态转速的准确度依赖于实际调试,同样型号的变频器用于转动惯量不一样的负载机械时,必须重新调试。
(3)利用电动机结构上的特征提取转速信号
无论是基于数学模型的开环计算转速,还是基于PI控制的闭环构造转速,都需要电动机的数学模型来做铺垫,这样就必不可少地受电动机参数变化的影响。为了克服速度估计中对电机参数的依赖性,可以从电动机本身结构上的特征出发,设法找到与转速有关的信息,从而提取转速信号。在这条途径上的研究成果有:
——利用基于齿谐波信号中与转速相关的频率成分来提取转速信息。但是此方法广泛采用快速傅里叶变换技术、自相关功频谱估计法,从而造成低速时估计误差大,实时处理能力差,易受噪声干扰。
——给定子绕组注入一个三相平衡的高频电压信号,在电机内部产生一个可检测的凸极,通过检测凸极位置来获取转速信息。这种方法不依赖电机参数和工况,低速估计准确,此法在无速度传感器控制领域有广阔的应用前景。另外还有漏感脉动检测法、阻抗差异定向法、饱和凸极检测法等。
3 结论
可以说随着电力电子器件及其技术的发展,矢量控制的异步电机能实现和直流电机相媲美的高性能调速。矢量控制在交流调速领域中已获得了广泛应用,然而为了提高其控制性能,在很多方面仍要进行深入的研究,例如电机参数在线识别、低速或是零转速启动等。未来交流电机控制的发展方向是综合利用各种智能控制,取长补短相互融合构成更优良的控制系统。
[1]冯垛生,曾岳南.无速度传感器矢量控制原理与实践[M].北京:机械工业出版社,2006.
[2]陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2000.
[3]陈伯时,陈敏逊.交流调速系统[M].北京:机械工业出版社,2005.
[4]李崇坚.交流电机变频调速控制系统的探讨[J].电力电子,2004,(1):20 -23.
[5]李夙.异步电动机直接转矩控制[M].北京:机械工业出版社,2001.
[6]王文森.基于PI自适应法的无速度传感器异步电动机矢量控制系统[J].电工技术学报,2002,17(1):1 -6.
[7]宫明玉,廖晓钟,冬雷.无速度传感器异步电机按定子磁链定向的矢量控制系统[J].电气传动,2005,35(7):20-23.