MCIS模块化区域计算机联锁控制系统的设计与实现
2012-11-27杨雪峰张正光
陈 璐,杨雪峰,张正光
(1.兰州交通大学自动化与电气工程学院,兰州 730070;2.北京康吉森交通技术有限公司,北京 101318)
计算机联锁控制[1]系统是保证行车安全的车站信号关键基础设备,高可靠性和故障-安全特性是系统应具有的最基本和最重要的特征,区域计算机联锁系统是在车站计算机联锁基础上结合了网络安全传输等技术发展的网络化、智能化、集成化的信号控制系统,它将整个控制区域视为一个车站,使用一套联锁机完成地理位置不同的多个车站的联锁逻辑运算和集中控制,实现车站联锁、区间闭塞和站间联系的一体化控制系统[2]。本文以二乘二取二制式的MCIS模块化区域计算机联锁为基础,从系统的硬件、软件体系结构两方面来分析系统的构成和特性。
1 MCIS模块化计算机联锁系统介绍
二乘二取二工作模式[3]由两系构成,采用双重结构,两系为热备工作模式,每系由两个CPU构成,互为校核组成容错与表决逻辑,能够识别错误的输入和干扰,保证数据输出的正确性,外层相同的两系构成互为备用的结构。硬件和软件设计都严格遵循“故障-安全原则”,由此可知二乘二取二结构构成的系统是互为校核和互为备用的组合。
主系统内双CPU分别运算,将运算结果送给其中的一个比较器进行比较,若比较一致,则输出;若不一致,则停止输出,并报警提示,多次比较不一致确定该系故障,系统倒机,备系接替主系继续工作,继续进行比较输出[4-5]。模块化计算机联锁系统结构如图1所示。
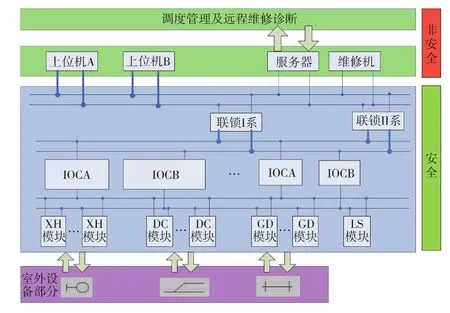
图1 模块化计算机联锁系统结构
由于MCIS模块化计算机联锁系统为二乘二制式,因此2套联锁机分别接受上位机发送来的操作命令。同时通过CAN总线接受IO模块所采集的站场数据状态信息,进行联锁逻辑运算,产生相应的控制命令。IO模块通过CAN通信接受联锁机的控制命令,但最终根据主要联锁机的控制命令控制自己的驱动电路、控制室外信号机和电动转辙机。
2 MCIS模块化区域计算机联锁系统介绍
区域计算机联锁系统是以计算机联锁基本模块构成的,用于控制成段多个车站(或区域内多个车场)信号联锁及站间闭塞(场间联系)的信号系统[6]。区域联锁系统是通过在某一作业较多的车站由车务人员集中控制周边一定范围内所有车站的信号联锁设备而构成的,拥有计算机联锁设备的称之为主控站,只采集室外设备并将此信息传递给主控站的一站称之为被控站,主控站和被控站两站共用1套CPU,两站通过光缆进行连接,因此在中心站的联锁设备就可以控制远程站的IO设备,达到远程站无人值守的目的。因此该系统既具有调度集中的宏观管理、远程控制的功能,又能满足现场调车等各种复杂作业的需要。
2.1 系统硬件结构
MCIS模块化计算机联锁系统可以通过光缆通道对远程车站进行控制。在本地站(主控站)通过上位机操作实现本地与远程站(被控站)的集中控制。
2.2 工作原理[7-10]
区域计算机联锁是将联锁设备设置在主控站,主控站上位机的操作指令通过本地主控站联锁机进行联锁逻辑运算后统一将运算结果发送到本地站和远程站。本地主控站和远程被控站CPU总线通过光纤连接,将控制指令传送到被控站的IO模块,从而驱动远程站的现场信号设备。被控站的执表机进行驱动实现对远程端的IO控制。而被控站和主控站都要设置信号、道岔和轨道模块进行采集本站信息,进而将采集的现场信息传递给主控站进行逻辑运算,制定相应的操作命令。被控站的主机笼只需要IOC模块和CANIOC模块即可,不需要CPU模块。主控站和被控站之间通过CAN总线进行通信。其系统结构如图2所示。

图2 区域计算机联锁系统结构
MCIS模块化区域计算机联锁控制系统分为3层:维修及接口层、联锁运算层、采集驱动层。从安全角度分析,整个系统分为安全区域和非安全区域,维修及接口层属于非安全区域,逻辑控制层和采集驱动层属于具备故障-安全特性的安全区域。维修及接口层通过车站联锁局域网与逻辑运算层通信,逻辑运算层与采集驱动层之间通过联锁安全通信总线传输信息。
2.2.1 维修及接口层
维修及接口层主要包括上位机和维修机,控制中心和联锁运算层之间的通信服务器等。
(1)上位机:主要为在值班室内车站值班员显示室外整个站场的当前状态,以及各室外设备(道岔、信号机、轨道电路)的状态。该层上位机采用双机热备动态冗余结构,当其中一个故障时,另一个可自动转换运行,无需人工干预。
(2)维修机:为电务维修人员提供实时的站场显示,IO模块状态显示,各种实时车务操作与联锁运行记录,以及记录显示与查询,图形再现等功能,其网络接口与交换机相连。
2.2.2 联锁运算层
(1)联锁Ⅰ系,联锁Ⅱ系采用动态冗余结构,Ⅰ系和Ⅱ系分别采用相同的模块负责联锁运算。
(2)联锁机:联锁A机模块,联锁B机模块负责联锁运算;通过联锁总线与对应的IOC模块进行通信;通过Internet与维修机模块通信,其网络接口接入交换机中。
(3)IOC通信模块:IOC模块成对配置,IOCA和IOCB同时工作,IO模块自己锁定IOC通信通道,模块负责与所有IO模块进行通信。IOC模块,减轻联锁CPUIO负荷,实现IO通信的电气隔离,提供长距离IO控制(区域联锁)。
2.2.3 采集驱动层
(1)LS模块:零散模块用于场联,站联,半自动闭塞,自动闭塞等联系电路。站场间结合可以通过零散模块采集结合驱动电路联锁,对照查条件以及对防护信号机的状态,转换轨的占用状态,完成进出段列车作业。
(2)XH模块:主要是采集现场的信号机信息,控制调车信号。
(3)DC模块:采集道岔的表示信息,1个道岔模块可控制2组道岔。
(4)GD模块:主要用于采集轨道受电端,分路电压等信息。
3 系统软件结构
MCIS模块化区域计算机联锁控制系统的应用软件主要包括:上位机软件、维修机软件、远程维护软件、区域控制通信软件、MCCAD软件、IO数据处理模块软件等多类软件子系统。系统软件结构如图3所示。
计算机联锁控制系统数据丰富[11],软件各子系统之间存在着复杂的信息传递和数据交换的关系,且各个子系统、模块之间要求必然要有较强的接口能力。从系统的整体需求出发,分析各软件系统所实现的功能和其他软件系统之间的交互关系,确定组成系统的各个硬件、系统的整体控制结构、各硬件的规模和功能、部件同步、部件交互和部件通信协议等,既考虑完全实现各项功能任务,又考虑软件的扩展和维护。从整体上软件体系结构设计的基本思想是模块化软件结构。

图3 区域计算机联锁软件体系结构
4 软件运行环境和设计
MCIS系统作为一种工业控制系统,采用的是时下铁路系统中流行的QNX操作系统,QNX是一种实时操作系统,具有多任务,优先级占用,快速程序切换等特性。本系统以QNX实现的举例站场的界面如图4所示。

图4 举例的站场界面
5 结论
MCIS区域计算机联锁控制系统,硬件上对安全部分(逻辑运算层、采集驱动层和通信安全总线)和非安全部分(上位机和车站控制局域网)均采用动态冗余结构、故障隔离技术和一些安全防护技术,保证了系统硬件的安全可靠;软件上,各软件子系统的动态冗余机制保证了对故障的及时屏蔽和系统的不间断安全运行,联锁逻辑中多种技术的运用确保了联锁逻辑的安全实施,保证了系统中软件部分的安全可靠。目前,该系统开发完成,已进入实际应用阶段。
[1]赵志熙.计算机联锁系统技术[M].北京:中国铁道出版社,1999:19-20.
[2]李小慧.集贲区域计算机联锁的设计与实现[D].北京:北京交通大学,2006.
[3]张本宏,陆阳,等.“二乘二取二”冗余系统的可靠性和安全性分析[J].系统仿真学报,2009,21(1):256-261.
[4]董昱,郑丽英,等.基于RTLinux/Linux的容错计算机联锁控制系统设计与实现[J].计算机测量与控制,2005,13(2):145-147.
[5]郑丽英,董昱,等.基于RTLinux/Linux的双机热备计算机联锁控制系统设计与实现[J].计算机测量与控制,2005,24(6):33-37.
[6]黄卫中.区域计算机联锁系统的设计与实现[J].铁道通信信号,2005,41(9):6-10.
[7]赵阳,张萍,等.湖东编组站Ⅰ—Ⅱ场计算机联锁控制系统[J].铁道标准设计,1999(1):35-37.
[8]铁道科学研究院通号所.TYJL-Ⅱ型车站微机联锁系统[R].北京:铁道科学研究院通号所,1997.
[9]铁道科学研究院通号所.TYJL—TR2000型容错计算机联锁系统[R].北京:铁道科学研究院通号所,2000.
[10]郭进.微机联锁系统实时性研究[J].铁道学报,1998,20(3):76-82.
[11]杨扬,邹少文.SWJTU-Ⅱ型计算机联锁控制系统设计和实现[J].铁道学报,1998,27(3):118-123.
