ATO仿真平台中速度环境模拟的设计与实现
2012-11-26郎诚廉
刘 浩,郎诚廉
(同济大学 电子与信息工程学院,上海 200331)
随着城轨交通的快速发展,人们对于轨道交通的依赖度越来越高。列车自动控制系统(ATC)是城市轨道交通系统高效高密运行必不可少的,目前我们国家的列车自动驾驶系统(ATO)基本上是引进国外的先进技术和设备,生产具有自主知识产权的ATO系统势在必行,因此对列车自动驾驶系统的研究是很有必要的。但是要在实际的运营系统上作研究和测试有很大困难,如果采用仿真的手段,建立一个通用的ATO系统测试平台对ATO进行研究,就能很好的解决这些问题。本文就是完成整个测试平台中一个重要的部分—速度环境的设计,而且本设计已经在上海地铁3号线ATC车载设备运行综合仿真平台中得到验证。
1 城轨ATC车载设备运行综合仿真平台
ATC的一个重要的子系统—列车自动驾驶系统(ATO)能够按照系统设定的运行曲线和自动监控系统(ATS)的指令选择最佳运行工况,实现列车速度的自动调整,包括牵引、巡航、惰行、制动和停车的控制以及车门开关的控制功能操作、准确执行行车计划、提高行车效率,并实现列车运行的最佳控制及节能处理。城轨交通ATC车载设备运行综合仿真平台包括ATS仿真系统、车辆电路仿真、牵引控制仿真系统、车辆制动仿真系统、车辆测速仿真平台、并伴有三维的前景和侧景仿真以及声音仿真系统等。其中,电机测速平台用于模拟列车运行速度并进行速度检测,实际ATO系统对其外围接口的要求,决定了采用真实的测速传感器。如图1所示,使用和真车相同的速度传感器检测电机驱动的传动齿轮的输出脉冲。速度传感器检测到的车轮转速再提供给车载ATP和ATO。车载ATC主机与车辆仿真主机通过网络连接,ATC主机根据ATS给出的信号和车辆目前的状态,给出代表脉冲调制(PWM)信号的量送给车辆仿真主机;车辆仿真主机通过牵引制动计算得出速度V,并将该速度信号送给电机测速平台;电机测速平台根据这个信号驱动一个实物电机和传动机构旋转运动,并采用测速传感器得到的速度信号回送给ATC主机。
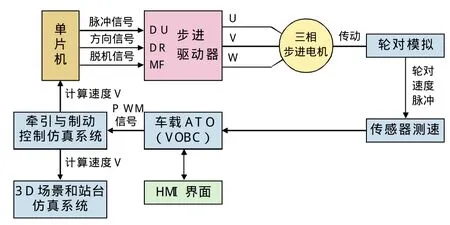
图1 城轨交通ATC车载设备运行综合仿真平台简图
2 步进电机的选择
步进电机是将电脉冲信号转化为角位移或者线位移的开环控制器件。在正常运行的情况下,电机的转速、停止的位置不受负载变化的影响,而只取决于脉冲信号的频率和脉冲个数,当步进电机驱动器接收到一个脉冲信号时,它就会驱动步进电机按已经设置好的方向转动一个固定的角度,称为“步距角”,步进电机的旋转就是按照步距角转动的。可以通过控制脉冲频率来控制电机转动的速度,从而达到调速的目的;同时可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的。
2.1 从转矩角度
由于本设计中所用的传动齿轮是真车上与轮对同轴的齿轮,如果齿轮质量全部集中在边缘的话,一定是满足要求的,所以可以根据公式(1)估算转矩M:

式中,m:齿轮质量,单位:kg;
g:重力加速度,单位:m/s2;
r:齿轮半径,单位:m。
由矩频特性曲线可知,在转速很高时,电机输出力矩会迅速下降,只有最大静力矩的1/4或1/5,所以,按照转矩计算得出的电机最大静力矩应该在4 M~5 M左右。
2.2 从转速角度
车轮转速与列车速度可用公式(2)表示:

式中,R:列车实际轮对半径,单位:m;
n:列车轮对转速,单位:r/min;
v:列车速度,单位:km/h。
由上式可知n= 25v/3πR。
2.3 从转动惯量角度
根据齿轮形状用公式(3)计算转动惯量:

式中,R:齿轮外半径,单位:m;
a:齿轮截面宽度一半,单位:m;
h:齿轮截面高度,单位:m。
3 控制电路的设计
3.1 单片机选择
对于步进电机控制系统采用微控制器STC11F04E单片机,它是单时钟/机器周期(1T)的单片机,具有高速、低功耗、超强抗干扰的优点,与传统的8051在指令代码上完全兼容,但速度快8~12倍。内部集成有高度可靠的复位电路,主要针对智能控制、高速通信、强干扰场合。
3.2 单片机控制电路
单片机控制电路由3个部分组成:DC/DC电源模块、单片机最小应用系统和在线编程电路。DC/DC电源模块提供控制电路所需功率和稳压。在单片机最小应用系统中,将P1口的第2位作为方向控制位,P1口的第3位作为脉冲控制位。STC11F04E单片机串行口对应的硬件部分是TxD和RxD引脚,如果将串行口功能在P3口实现,对应的管脚是RxD/P3.0,TxD/P3.1,通过MAX232A和USB转串口线与仿真机实现通信,利用仿真机的STC-ISP软件加载“用户程序”以及发送数据到STC单片机。控制电路如图2。
3.3 驱动器电路
驱动器的所有输入信号均通过内部光耦隔离,为确保内置高速光耦可靠导通,要求提供控制信号的电流驱动能力至少15 mA。驱动器内部光耦限流电阻为270Ω,当输入信号电压高于5 V时,可根据需要外串电阻R进行限流。如图3所示,对于共阳接法,可以通过公式(4)计算驱动电流:式中:VCC—电源电压,为5 V;

UD—二极管导通电压,为0.7 V;R0—驱动器内部光耦限流电阻,为270 Ω。

图2 控制电路图
通过计算可以得知,使用灌电流的方式可以满足上述要求,并且不用外串电阻。
图3中,CP为脉冲信号;DIR为方向信号;EN为使能信号。
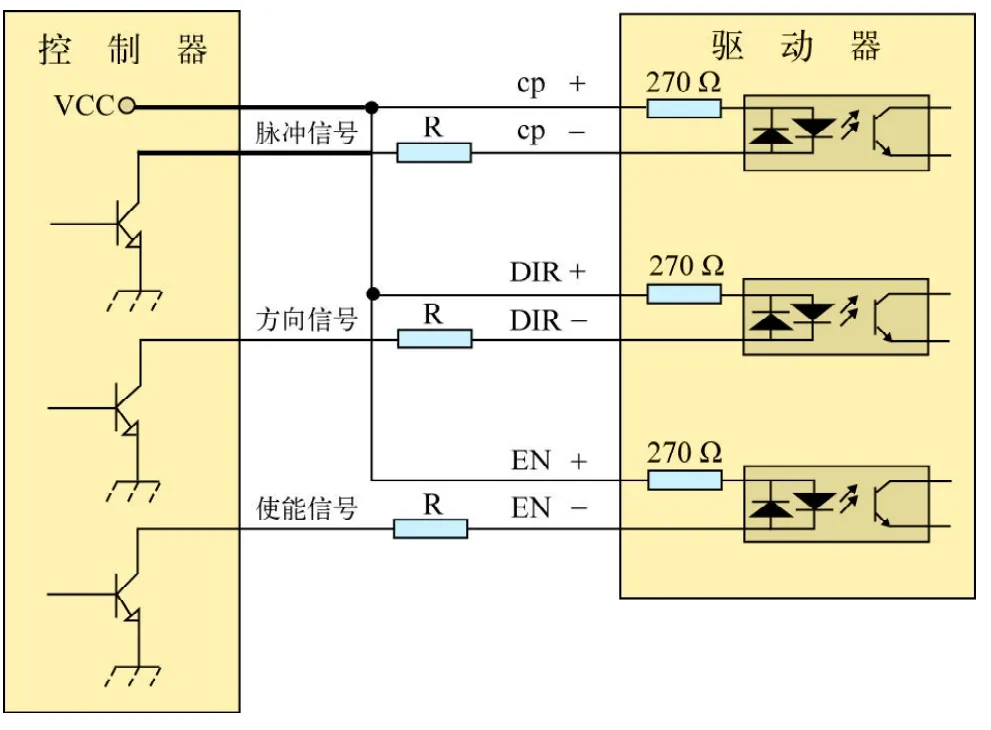
图3 驱动器电路图
4 控制系统软件设计
对于牵引和制动控制仿真系统通过串口传输的实时数据(包括速度和方向数据),单片机要将其转化为步进电机的输入信号。步进电机的输入信号包括步进脉冲信号和方向电平信号。每接收一个脉冲信号 CP,驱动步进电机旋转一个步距角(细分时为一个细分步距角)步进,电机的转速与 CP 的频率成正比,CP 的脉冲个数决定了步进电机旋转的角度。电机的转动方向由 DIR信号决定。
用单片机实现步进电机的实时速度控制,实际上就是控制脉冲的频率,高速时使脉冲频率增高,低速时使脉冲频率降低。一般采用软件延时法和定时器法来确定脉冲的周期,本设计采用定时器来实现延时。定时器法是利用单片机内部的定时器来实现的,在每次进入定时中断后,改变定时常数,这种方法对于CPU运行时间占用较少,比较适用。本设计中,脉冲延迟使用定时器0,串口传输数据使用定时器1。
流程图如图4。
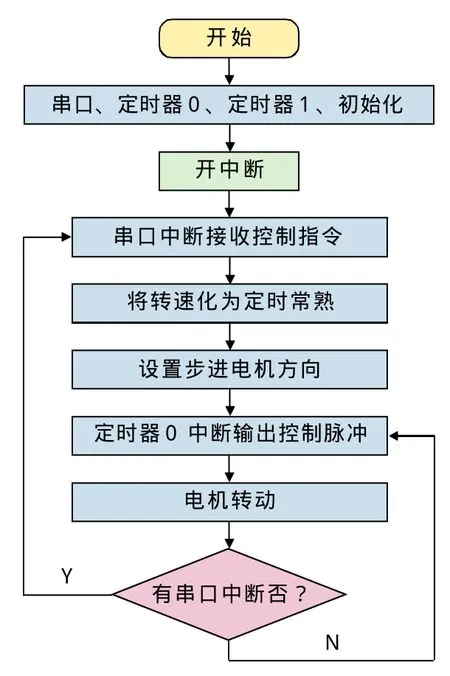
图4 主程序流程图
5 结束语
采用已实现的城轨列车速度模拟系统,步进电机在工作频率内运行平稳,响应速度快。该系统已在上海地铁3号线ATC车载设备运行综合仿真平台中得到验证,该仿真平台对地铁检修人员和驾驶员的培训教学起到了重要作用。城轨列车速度模拟系统还可以应用于ATO系统测试平台,这对ATO系统的研究开发与测试有着积极的作用。
[1]杨 宏,李国辉. 基于Proteus与单片机的步进电机控制设计[J]. 现代电子技术, 2010(5):104- 106.
[2]肖金球. 增强型51单片机与仿真技术[M]. 北京:清华大学出版社,2011.
[3]刘保廷,程树康. 步进电机及其驱动控制系统[M]. 哈尔滨:哈尔滨工业大学出版社,1997.
[4]刘晓山. 单片机在步进电机控制系统中的应用[J]. 机电工程技术,2004 ,33(1):69-70.
[5]陈学军.混合式步进电机SPWM细分驱动控制技术的研究与实现[D]. 杭州:浙江工业大学,2006.
