基于HMCD的仿人机器人单杠运动控制策略
2012-11-26陈雯柏高世杰吴细宝
陈雯柏,高世杰,吴细宝
(北京信息科技大学自动化学院,北京100192)
国际仿人机器人奥林匹克竞赛(International Humanoid Robot Olympic Games,IHOG)是将小型仿人机器人作为运动员,借助人类奥林匹克竞赛规则进行的和人类奥林匹克并齐的另一类国际性竞技娱乐活动.其目标是借助人类奥林匹克的魅力和挑战性来促进仿人机器人关键技术的研究和发展,最终实现“无处不在”的机器人时代[1].
仿人机器人完成如人类舞蹈、体育运动等复杂而灵活的动作,可通过求解运动解析方程并获得运动轨迹来完成全身动作的设计,但该方法难度极大,还可能存在无解的情况.目前,基于人体运动数据(human motion capture data,HMCD)的复杂动作设计方法,逐渐成为仿人机器人动作设计的有效手段之一[2-6].文献[3-4]提出了人体动作特征符号的捕捉、建立运动模式数据库进行动作模式划分、匹配人体动作关键帧的仿人机器人动作生成方法.文献[5]采用捕捉人体舞蹈动作、满足机器人的关节与运动约束的解决方法,并以此生成仿人机器人动作.文献[6]采用仿人机器人复杂动作设计中人体运动数据提取及分析方法,在仿人机器人BHR-2上完成了刀术表演实验.文献[7]基于运动相似性原理提出了一种仿人机器人前向倒地动作的设计方法.
本文根据IHOG单杠比赛技术要求,提出基于HMCD的控制策略,成功完成了仿人机器人单杠运动控制.
1 IHOG单杆运动的技术要求
如图1所示,IHOG单杆比赛是基于单个机器人的杠上动作表演,一次表演为1 min.该项目主要考验机器人对单杠运动(旋转、弯腿、倒立等)复杂动作的规划能力及程序化的控制能力.
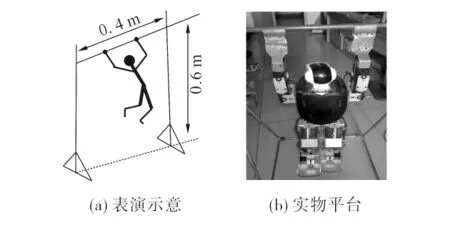
图1 机器人单杠运动Fig.1 Humanoid robot on a horizontal bar
IHOG单杆比赛过程要求机器人能完成所有指定的5种基本动作:摇摆爬杠、倒立、360°正向或反向旋转、360°反向旋转、弯腿.满分为100分,其中每种动作20分;如果还能完成具有悬念的高难度动作(如连续旋转3次以上)则额外加分.该项目的控制要求不是一种量或几个量的一种简单变化,而是一个高度非线性系统的一系列复杂行为的控制,并且其活动衔接关系具有很强的时间性.
2 IHOG单杆运动动力学分析
单杠机器人要完成上述摇摆爬杠、倒立、正向或反向旋转、360°反向旋转、弯腿上杠等动作的控制是相当复杂的,其任务涉及到多个控制量与被控量的协调控制.这正是近年来国内外出现的关于欠驱动机器人的研究工作[8-10].非驱动关节的研究是实现仿人机器人高效、自然而优美的运动的关键.图1(b)为采用16自由度的Metal Fighte-1型仿人机器人构建的IHOG单杆比赛实物平台.为完成上述工作,欠驱动单杠机器人可建立为双关节或三关节的Acrobot的模型[9].
2.1 双关节Acrobot的数学模型
双关节Acrobot的数学模型具有2个自由度,髋关节为驱动关节,手关节可自由运动.该模型不足以表现人体的单杆动作.单杠运动中,肩关节起很大的主动控制作用,它和髋关节协调配合可准确模仿人的单杠动作.显然,2个关节的模型无法模仿人在单杠运动中的复杂动作,只能简单摇摆.
2.2 三关节Acrobot的数学模型
三关节欠驱动Acrobot的数学模型中,手部关节为自由铰接,肩关节和髋关节都是驱动关节.手部可做完全不受限的旋转,角度范围为(0,2π),肩关节和骸关节不能做完整的旋转.有3个自由度但只有2个驱动关节,这是一类具有二阶非完整约束的欠驱动机械系统,通过协调控制三关节体操机器人的2个关节,可模拟人的体操动作.文献[10-11]给予了分析与研究.为方便后文说明,这里仅对单杠运动的上杠动作,进行简要动力学分析,如图2所示.

图2 单杠机器人摆起动作Fig.2 Swing-up action of humanoid robot
图2(a)为初始位姿,θ1= π,θ2=0,θ3=0,以逆时针方向为正,同时给肩关节和髋关节一较小正向加速度a,二杆和三杆将获得向左的动能.
以一杆为参照系,当θ2>α时(α为设定的经验角度,如2(b)所示,)再给定2个关节一个与a1大小相当的控制命令-a1±δ1,两关节开始做负向加速运动.若此时再给定2个关节一个与a1大小相当的控制作用a1±δ2,则二杆和三杆开始减速,肩关节和髋关节逐渐打开,系统进入如图2(c)所示状态:θ2=0,θ3=0.
基于机器人物理结构,髋关节无法大幅度反向转动.系统将在重力作用下,由图2(c)状态过渡到图2(d)、图2(e).由于手关节摩擦,图2(d)点能量小于图2(c)点(Ed<Ee).此时应通过收缩肩关节和髋关节(如图2(f)所示),缩短系统重心到手关节的力臂,减小系统转动惯量,以减少系统从图2(d)状态 θ1=π,θ2=0,π3=0 摆起到 θ1=0,θ2=0,θ3=0倒立状态所需的能量.如图2(g)所示,当θ1逐渐减小接近倒立状态时,打开肩关节和髋关节,机器人可过渡到 θ1=0,θ2=0,θ3=0 状态,摆起过程结束.
3 基于HMCD仿人机器人复杂动作设计
如2.2节所述,上述单杠运动要求在一定时效内从外部获得数据并做出迅速响应.大量实时数据处理,对单杠机器人的性能要求非常高,图2所示实物平台无法满足.为此,本文提出基于HMCD的控制策略实现仿人机器人单杠运动控制策略.
基于HMCD的仿人机器人的运动规划流程如图3所示.该方法可避开复杂动力学计算,通过对人类运动数据分析与修正,可得到各主要关节角度变化轨迹.根据力学相似性原理,这些函数关系可进一步推广到关节变化来规划步态,从而实现机器人的仿人运动[4].
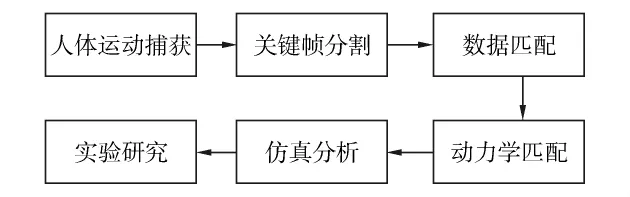
图3 基于HMCD的仿人机器人的复杂动作设计流程Fig.3 Design procedure of humanoid complicated motion based on HMCD
3.1 三维人体骨骼模型
人体通过400对肌肉收缩驱动关节运动,但对仿人机器人来说,控制400对“人造肌肉”这样多的多变量系统几乎是不可能的.只考虑基本动作,人体骨骼可视为一系列通过关节连接的刚性连杆机构,其中包含了16个关键点(三维特征点)[12].
3.2 运动捕获
人体运动分析是从视频中获取人体运动信息,并加以分析、识别与利用.运动捕获用于仿人机器人复杂动作设计的基本思想是:利用人体运动姿态是相邻肢体间不同空间角度的组合特性.这样,通过光运动捕捉一系列基本动作(关键帧)特征点的空间坐标,就可得到有用的关节角数据.文献[5]称关键帧的停顿姿势为关键姿势,相邻2个关键姿势之间的过渡动作为“基段”.关键帧体现了这个运动的基本特征,可能会在整个动作行为中重复,图2所示即是本文单杠机器人在摆起动作设计中采用的几个关键帧.
3.3 数据匹配
利用三维人体骨骼模型,以人的相应关节点的绝对坐标与机器人简化模型坐标进行比较,使用关节节点的绝对空间坐标,通过逆运动学求解可以计算出每一个仿人机器人的关节角度.由于机器人模型和人体模型存在着运动学约束差异,关节角度数据不能直接应用于仿人机器人,还需经过动力学匹配处理.若匹配后数据符合机器人动态稳定性条件,则可用来驱动仿人机器人完成稳定运动.
对于步行这类运动,地面接触条件是与稳定性要求一样严格的.对于本文考虑的单杠运动,手臂的末端效应是一个自由的空间.运动学约束的关节角度范围主要考虑避免在不同的肢体之间的干扰程度.在这种情况下,捕捉到的数据将通过仿真分析后转换进行实物机器人实验.
3.4 动作合成
运动学匹配和稳定性调节完成后,需要进行的是机器人运动轨迹获取.机器人复杂的动态运动是由上肢和下肢的基本动作构成,它是任意2个基本关键姿势的一种过渡.虽然关键姿势值得研究,但基本动作之间的衔接不顺畅也不能确保顺利完成复杂的动作.
本文采用三次样条插值方法来有效解决这个问题.如果θi表示在时刻i的关节旋转角度,θi+1表示在下一时刻i+1时的旋转程度.在整个过渡过程中,关节旋转的角度θ(t)可以通过式(1)得到:

显然,角速度θi'可表示为

如果 θi在[ti,ti+1]是处处可微,那么这个衔接曲线是光滑的.当然,这是一个容许控制问题,角度θt和角速度 θt'必须限制在一个可以实现的范围内[13].
4 仿人机器人单杠运动的实现
4.1 仿人机器人平台
图1(b)所示MF-1型机器人身高31 cm,腿长18 cm,臂长15 cm,带标准电池时重量为1.3 kg.机器人的结构比率与人体身高体重比率比较接近,具体如表1所示.
表2与表3分别给出了MF-1型机器人的相关关节自由度配置与性能参数.
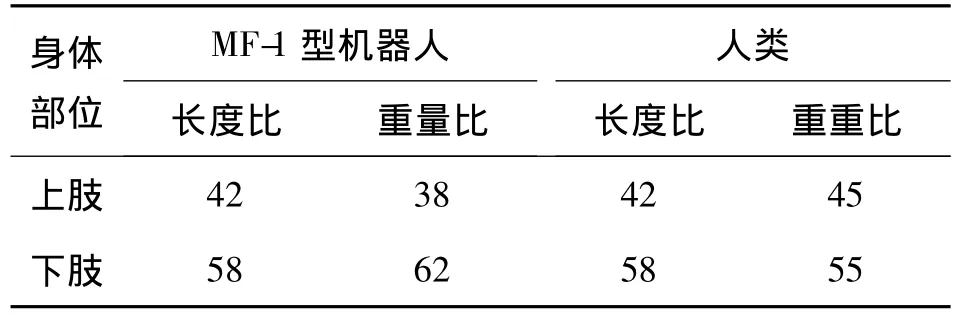
表1 MF-1型仿人机器人身体比率Table 1 Body ratio of MF-1 humanoid robot %
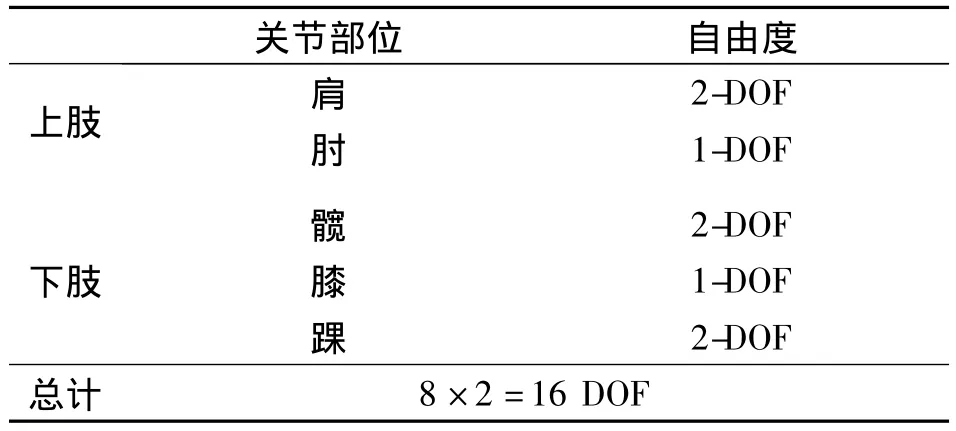
表2 型仿人机器人各关节自由度配置Table 2 Freedom configuration of MF-1 humanoid robot
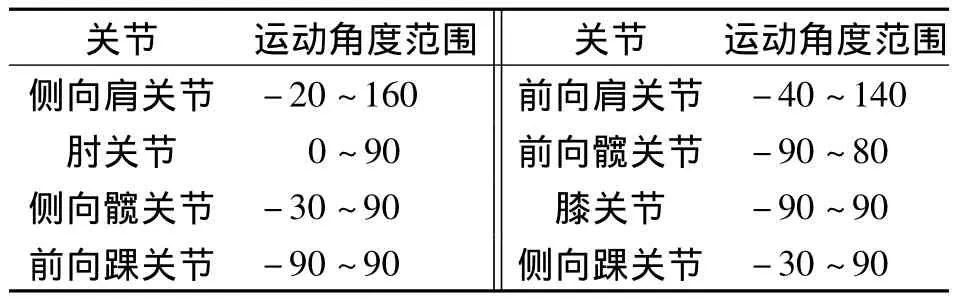
表3 MF-1型类人机器人各关节参数Table 3 Parameters of MF-1 humanoid robot (°)
4.2 基于3-DMAX环境机器人的建模与运动仿真
3-DMAX作为用户群最大的三维制作软件,广泛应用于影视广告、建筑效果图制作与游戏设计等领域,本文采用它进行机器人单杠动作仿真模拟.
3-DMAX中,骨骼系统用来模拟骨骼各种运动,父子关系是一种模型间关系,父对象的运动可以带动子对象运动,而子对象的运动却不能影响父对象的运动.对于3-Dmax动画建模骨骼系统比较适合模拟生物的运动特点,而父子关系则适合用于体现机械运动的特点.
基于第3节思想与仿人机器人平台参数,图4建立了MF-1型机器人简化模型,它具有与实体相同的自由度数目、关节结构和骨骼长度.建模时采用了层次结构,这反映了关节间的耦合关系.使用massfx将仿人机器人单杠模型转化为刚体,并设定各个部位的质量等参数,重新生成单杠和机器人的手部物理网格并将手部网格的洞放置在单杠上.
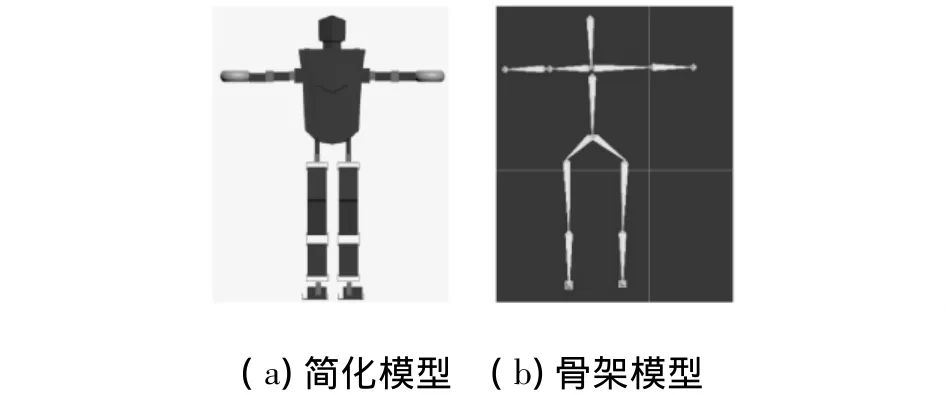
图4 MF-1型机器人简化模型和骨架结构Fig.4 Swing-up action of humanoid robot
为了让这个模型能够达到和所使用的机器人有同样的运动特征,需要为这个模型的各个部件加上父子关系.建立的父子关系链接的模型体现了机器人的16自由度的特点,并能通过移动模型的各个关节点来真实体现机器人的运动规律.
将人体单杠视频中第1帧作为准备动作,经历20帧达到完全收腹,再经历14帧到达竖直向下位置并且有向右的速度,再经历16帧的自由运动达到势能最高处.图5给出了基于HMCD的控制策略中的运动员摆动的关键姿势和MF-1型机器人简化模型的相似动作.
图5 人体摆动与MF-1型机器人模型摆动关键姿势Fig.5 Swing-up key frames of the actor and the humanoid
图6为使用3-Dmax分别输出的机器人髋关节和肩关节的关节角轨迹.关节角轨迹平滑连续,说明数据可用.图中加粗实点表示轨迹变化过程中的关键姿态.

图6 髋关节与肩关节转角3-Dmax仿真曲线Fig.6 Angle simulation curve of hip and shoulder in 3-Dmax
4.3 单杠机器人实物运动实验
根据图6关节角轨迹,对关节角按表3中数据加以限制,同时在角度变化剧烈时,适当放慢节奏,本文成功实现了单杠机器人的摆动上杠运动,其关键帧如图7所示.机器人实物运动与人体动作非常接近,关节角轨迹也基本一致.采用与摆动类似的方法实现单杠机器人的连续正向(前翻)与反向旋转(后翻)等动作,这里不再赘述.

图7 MF-1型单杠机器人实物运动实验Fig.7 Physical experiment of MF-1 humanoid robot
5 结束语
分析了欠驱动单杠机器人Acrobot模型,并根据IHOG技术要求、实物机器人本体结构和自由度配置,提出了基于HMCD的仿人机器人单杠运动控制策略.通过视频分析人体单杠运动数据,根据仿人机器人模型分析关键特征点、基本动作的运动数据得到的关键帧的关节角数据,经过适当的运动学约束调整,基于3-Dmax仿真环境,采用插值方法生成了仿人机器人的运动轨迹.在MF-1仿人机器人单杠实物平台上进行控制实验的成功,验证了该方法的有效性.
[1]张利格,毕树生,高金磊.仿人机器人复杂动作设计中人体运动数据提取及分析方法[J].自动化学报,2010,36(1):107-112.ZHANG Lige,BI Shusheng,GAO Jinlei.Human motion data acquiring and analyzing method for humanoid robot motion designing[J].Acta Automatica Sinica,2010,36(1):107-112.
[2]TAKANO W,YAMANE K,NAKAMURA Y.Capture database through symbolization,recognition and generation of motion patterns[C]//Proceedings of IEEE International Conference on Robotics and Automation.Roma,Italy,2007:3092-3097.
[3]NAKAZAWA A,NAKAOKA S,IKEUCHI K.Matching and blending human motions using temporal scaleable dynamic programming[C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems.O-saka,Japan,2004:287-294.
[4]NAKAOKA S,NAKAZAWA A,YOKOI K,et al.Generating whole body motions for a biped humanoid robot from captured human dance[C]//Proceedings of IEEE International Conference on Robotics and Automation.Taipei,China,2003:3905-3910.
[5]张利格,黄强,杨洁,等.仿人机器人复杂动态动作设计及相似性研究[J].自动化学报,2007,33(5):522-528.ZHANG Lige,HUANG Qiang,YANG Jie,et al.Design of humanoid complicated dynamic motion with similarity considered[J].Acta Automatica Sinica,2007,33(5):522-528.
[6]柯文德,崔刚,洪炳镕,等.参数化优化的仿人机器人相似性前向倒地研究[J].自动化学报,2011,37(8):1006-1013.KE Wende,CUI Gang,HONG Bingrong,et al.Falling forward of humanoid robot based on similarity with parametric optimum[J].Acta Automatica Sinica,2011,37(8):1006-1013.
[7]HONG Bingrong,KE Wende.International huo olympic games and its key technology[J].Journal of Harbin Institute of Technology,2010,17(suppl.2):1-4.
[8]栾楠,明爱国,赵锡芳,等.含有非驱动关节机器人的学习控制[J].机器人,2002,17(3):7-10.,MING Aiguo,ZHAO Xifang,et al.Learning control for robot with unactuated joints[J].Robot,2002,17(3):7-10.
[9]何广平,陆震,王凤翔.欠驱动冗余度机器人运动优化控制[J].宇航学报,2002,21(6):17-31.HE Guangping,LU Zhen,WANG Fengxiang.Motion optimal control of under-actuated redundant robot arm[J].Journal of Astronautics,2002,21(6):17-31.
[10]李祖枢,张华,古建功,等.3关节单杠体操机器人的动力学参数辨识[J].控制理论与应用,2008,25(2):242-246.LI Zushu,ZHANG Hua,GU Jiangong,et al.Dynamic parameter identification of three-link acrobot on horizontal bar[J].Control Theory and Applications,2008,25(2):242-246.
[11]薛方正,郭亿,李祖枢.三关节单杠体操机器人的建模与控制[J].控制与决策,2011,26(6):821-825.XUE Fangzheng,GUO Yi,LI Zushu.Dynamic model analysis for acceleration driven three-link acrobat[J].Control and Decision,2011,26(6):821-825.
[12]ZHUANG Yueting,LIU Xiaoming.3D human skeleton reconstruction from motion image sequence[J].Journal of Computer-Aided Design and Computer Graphics,2000,12(4):245-251.
[13]ZHONG Qiubo,HONG Bingrong,PAN Qishu.Design and implementation on humanoid robot based on roboBasic[J].Journal of Harbin Institute of Technology,2009,41(sup.2):28-32.