基于模糊控制的微型燃机燃料压力控制
2012-11-24马丽梅张增吉吴元亮
马丽梅,张增吉,林 莹,吴元亮
(中国人民解放军理工大学 理学院 基础电子学系,江苏 南京 211101)
本文针对国内外微型燃机控制的现状,对提高微型燃机的运行效率进行了深入的研究,提出了先进的微型燃气轮机燃料压力系统模糊控制的思想。常规PID控制原理比较简单、鲁棒性好、可靠性高且容易实现,但是在燃料压力系统中存在干扰以及滞后性等诸多因素,因此采用传统PID控制达不到理想的控制效果。本文在保留传统PID控制优点的基础上,运用模糊PID较强的参数自整定功能,对控制系统的参数进行优化,达到了很好的控制效果。
1 系统总体方案设计
燃气轮机是以气、液体作为燃料,将燃料燃烧时释放出来的热量转变成有用功,能够高速回转的叶轮式动力机械。与目前其他动力装置相比,微型燃气轮机发电机组具有高效率、低噪声、重量轻、体积小、低污染以及多台集成扩容等优点[1-3]。燃料压力控制系统从属于微型燃机辅助控制单元(AECU)。压力控制器模块负责微型燃气轮机喷油嘴前燃料的恒压控制,为燃机运行提供压力恒定﹑流量可变的气液燃料,是AECU的主要功能模块。本文针对气体燃料展开设计。
图1为燃料压力控制系统的结构框图,燃料调节阀门根据透平转速和外界负荷变化的要求不断地改变其开度以调整供到燃烧室的天然气流量。在设计时提出了燃料调节阀门前后的天然气压比总是满足小于临界压比的前提条件,因此,流过燃料调节阀门的天然气流量只是燃料调节阀门的开度以及调节阀门前天然气压力P的函数[4]。若能保证燃料调节阀门前(即燃料储罐内)天然气压力P恒定,只要通过控制燃料调节阀的开度就可以间接控制天然气的流量。因此,维持压力恒定(即调节阀前压力P恒定)是保证燃气轮机正常运行的前提条件。由图1可以看出,气体燃料从燃料进口进入,通过燃料压缩机压缩增加压力,燃料储罐外接一个压力传感器,压力传感器进行压力采样,将采样值进行模数转换之后送到AECU控制板。燃料压力控制器按照程序设计的压力控制算法,以压力采样值和压力设定值为输入量,计算出控制量,从而控制燃料压缩机的转速,达到控制压力的目的。压力闭环控制系统主要由AECU、变频器、压缩机和传感器几个部分构成。其中,核心芯片AECU采用美国TI公司的TMS320LF2407A,其本身具有A/D转换电路和CAN总线控制器模块,并具有计算速度块、功耗低和存储空间大等优点,为高性能的控制提供了高效性的信号处理与控制平台。
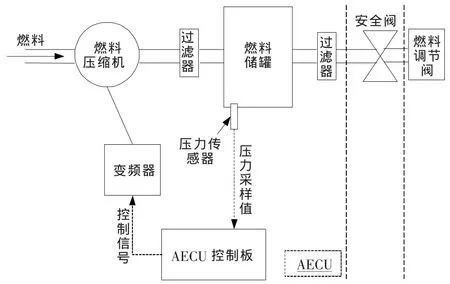
图1 燃料压力控制系统的结构框图
本系统采用燃料压力模糊PID控制,虽然初期采用的PID控制算法具有简单实用和易于编程等优点,但是PID最佳整定参数确定后,并不能说明它永远都是最佳的。当外界扰动发生根本性的改变时,就必须重新根据需要进行最佳参数的整定。由于微型燃气轮机控制系统是一个多变量、强干扰及参数时变的系统[5],同时,传统PID参数在进行整定的过程中,其整定值具有一定区域的优化值,而不是全局的最优值,因此不能从实际上解决动态品质和稳态精度的矛盾[6]。针对传统PID控制器在燃料压力控制系统使用中存在的问题,提出了燃料压力模糊PID控制。根据微型燃机的实际工况,将模糊控制引入到燃料压力控制系统中,并结合调试与仿真,得到了一个稳定的控制效果。
2 模糊自整定PID控制
模糊PID控制器结构是一类被广泛应用的PID控制器,该控制器改变了传统PID参数Kp、Ki和Kd的控制策略,提出了可以根据跟踪误差信号等动态改变PID控制器参数的方法,改善了控制效果。
模糊逻辑整定PID控制器的表达式为:

其中,γp(k)、γi(k)和 γd(k)是校正速度量,随着校正次数的增加,它们的值将减小。由式(1)可以看出,下一步控制器的参数可以由当前的控制器参数与模糊推理得出的控制其参数增量的加权和构成,表达式如下:



此时,式(2)中的控制量可以改写为:

根据模糊控制原理对 Kp、Ki和 Kd3个参数进行在线修改,使被控对象具有良好的动静态特性。图2所示为模糊PID控制器控制框图[7]。
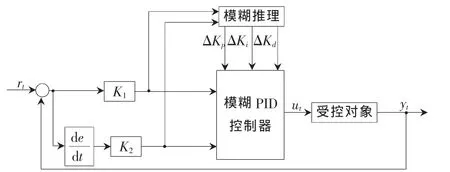
图2 模糊控制器结构
本文采用7段式模糊论域来描述模糊子集,一般记作:E={NB,NM,NS,ZE,PS,PM,PB},其含义是“负大”、“负小”、“负中”、“零”、“正小”、“正中”、“正大”。 设 E、Ec和Kp、Ki、Kd均服从正态分布,可以得出各个模糊子集的隶属度。将偏差 e(t)和偏差变化率 de(t)/dt以及输出量量化到(-3,3)的区域内,其隶属函数曲线如图 3所示。模糊控制核心是建立合适的模糊规则表,规则表是根据设计人员的设计经验来设计的,表1是ΔKp、ΔKi和ΔKd的整定规则表[6]。

图3 隶属函数曲线
3 仿真结果与分析
在其他单元不参加工作的时候,通过对现场采集的压力数据进行系统辨识,得到了微型燃气轮机燃料压力控制系统的模型,其表达式为:

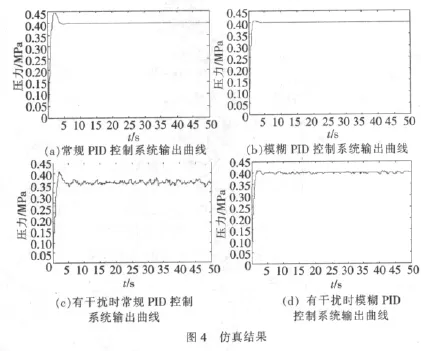
在MATLAB中建立模糊控制器,模糊控制器设计好之后,建立模糊规则表,利用MATLAB对普通PID控制和模糊PID控制进行仿真分析,按照实际的压力给定值为0.4 Mpa,仿真结果如图4所示。
从图4可得,模糊PID控制器以数字PID控制器为基础,引入模糊控制方法,实现了对PID控制中3个参数的在线调整,根据系统偏差 e(t)和偏差的变化率de(t)/dt来改变 Kp、Ki和 Kd以提高系统的控制精度和反应速度。模糊PID控制相对于数字PID控制有以下的优点:
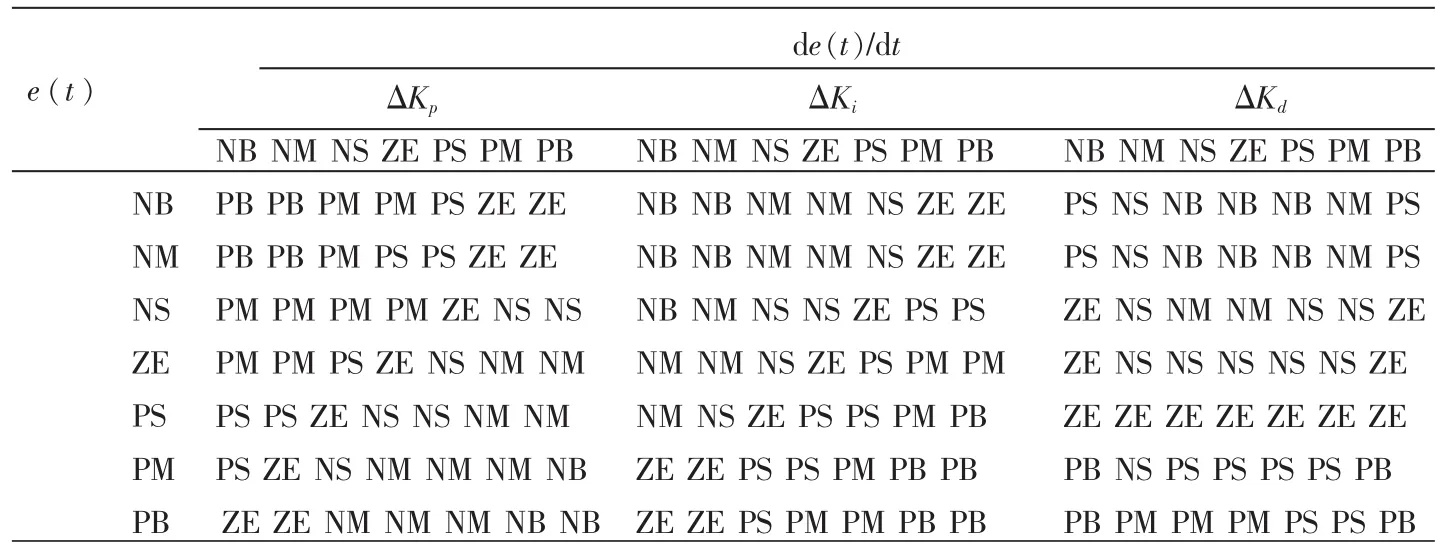
表1 ΔKp、ΔKi、ΔKd的整定规则表
(1)Kp、Ki和 Kd3 个参数根据系统偏差 e(t)和偏差的变化率de(t)/dt动态变化,更符合系统工作中实时变化的规律和特性;
(2)模糊PID控制精度高,反应时间短。可见,参数自整定模糊PID控制是一种优良的控制方法,在性能上比数字PID有很大提高。但在控制实现的过程中也要综合考虑其他因素的影响,以最大可能地提高控制的性能,即降低控制系统中的反应时间和减小超调量。
(3)运用于微型燃气轮机燃料压力控制系统压力自动调节的参数自整定模糊PID控制,是在常规PID控制算法的基础上通过计算当前系统误差 e(t)和误差变化率 de(t)/dt,利用模糊推理对 PID 3个参数 Kp、Ki和Kd进行在线调整,该方法实现简单、方便易用,对实际控制有重要的指导意义。用模糊推理的方法在线动态调整PID参数,能够发挥PID和模糊控制两者的优点,对被控系统的适应性强,鲁棒性好,特别是在系统参数发生变化时同样可以获得令人满意的控制效果,能很好地适应实际生产过程中的控制要求。
[1]Capstone Turbine Corporation.Capstone low emissions micro turbine technology[R].2000.
[2]靳智平.微型燃气轮机在我国电力系统的应用前景[J].发电设备,2005(2):135-138.
[3]沈阳黎明航空发动机(集团)有限责任公司.燃气轮机原理、结构与应用[M].北京:科学出版社,2002.
[4]ROWEN W I.Simplified mathematical representations of heavyduty gas turbines[J].Journal of Engineering for Power,1983,105(4):865-869.
[5]杨德东,张化光,邓玮.微型燃机控制系统设计中的几个问题[J].控制工程,2006,13(3):278-281.
[6]薛定宇.控制系统计算机辅助设计——MATLAB语言与应用(第 2版)[M].北京:清华大学出版社,2006.
