高速弹体阴影图像特征点判读技术研究
2012-11-22杨宗伟孔德仁贾云飞
杨宗伟,孔德仁,贾云飞
(南京理工大学 机械工程学院,江苏 南京 210094)
阴影照相是针对高速弹体飞行特性的一种重要非接触测试手段,其采用正交摄影的方法捕捉运动体在不同时刻点的图像,并通过建立特征点的图像坐标和空间坐标之间的联系,达到观察在照相时刻被测对象的质心坐标、飞行姿态以及不同时刻点的速度变化的目的[1-2]。所谓特征点,是指在图像上选定的用于特性分析的点,通常根据测试目的以及被测对象的形状特征进行选取,除质心外,至少还需要目标轴线上的两点,以完成姿态角的计算。因此,阴影图像数据判读的过程也可以说是特征点的识别过程,而如何根据图像得到特征点的像素坐标是需要解决的关键问题。传统的阴影照相系统采用高压火花光源和胶片式相机,图像判读繁琐且精度不高。随着CCD成像技术的引入,目前已经形成了以脉冲激光光源和高分辨率CCD摄像机为主要组件的数字式阴影照相系统,此系统通过控制光源闪光次数可以在一张照片上捕捉高速弹体在多个时刻的像,并且在成像质量上也有了较大提高[2]。但是,在图像数据判读方面,仍缺少一种与其相适应的处理方法,往往还是人工进行干预,无论在处理的效率还是判读的精度方面都不能满足科研工作的需要。而且在一次测试项目中,往往需要对多幅图像同时进行处理,使用传统的数据判读方法会极大地延长处理周期,效率问题便显得尤其突出。针对这一情况,笔者提出的图像处理和特征点判读方法可以由阴影图像快速地识别出被测对象的特征点坐标,经实验验证该方法可行性好,能够较好地解决传统方法效率低下和判读精度不高等问题。
1 高速弹体特征点测量原理
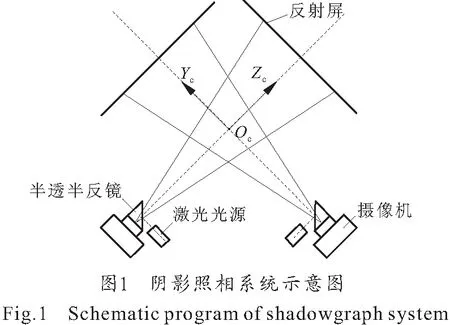
图像数据判读的目的是得到特征点的空间坐标,而通过图像处理从阴影图像直接识别出的只是特征点的像素坐标,因此需要建立图像坐标系和空间坐标系之间的联系[3]。图1是一个阴影照相系统的截面简图,两台摄像机的镜头中心轴线相交且正交,激光光源可进行多次闪光,以捕获被测对象在多个时刻的图像。为了保证左右两侧相机拍摄时序的一致性,两个激光光源的闪光时刻必须严格同步。YcOcZc为照相工作站坐标系,坐标轴Xc的正方向与被测运动体的前进方向一致。
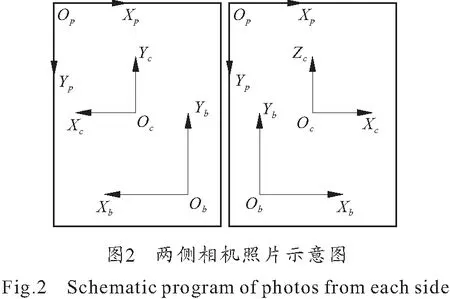
当高速弹体穿过照相工作站时,左右两侧的相机会分别捕捉其在XcOcYc和XcOcZc面的图像,如图2所示。照片上Oc-XcYcZc为照相站坐标系,Op-XpYp为像素坐标系,Ob-XbYb为相机坐标系。相机坐标是在阴影照相系统安装固定后,由相机标定确定的,在照片上使用特定的标记点标示其方位。通过相机标定,保证了相机坐标系分别与照相站坐标系在左右两幅照片上的投影方向一致,仅坐标原点存在偏移量,当相机位置固定后,这个偏移量是不变的。如果知道了特征点在Ob-XbYb中的坐标,经过平移就可以得到其照相站坐标。在进行图像数据判读时,直接得到的是特征点的像素坐标,即Op-XpYp坐标。因此需要进行坐标的变换,将特征点的像素坐标转换到相机坐标系。
相机标定后相机坐标系与像素坐标系之间通常会有一个夹角,以左侧相机照片为例,如图3所示。

假定Ob在Op-XpYp中坐标为(xo,yo),对于Op-XpYp坐标中的任意一点(xp,yp),要转换到Ob-XbYb坐标系,首先要进行坐标的平移:
(1)
然后进行坐标的旋转:
(2)
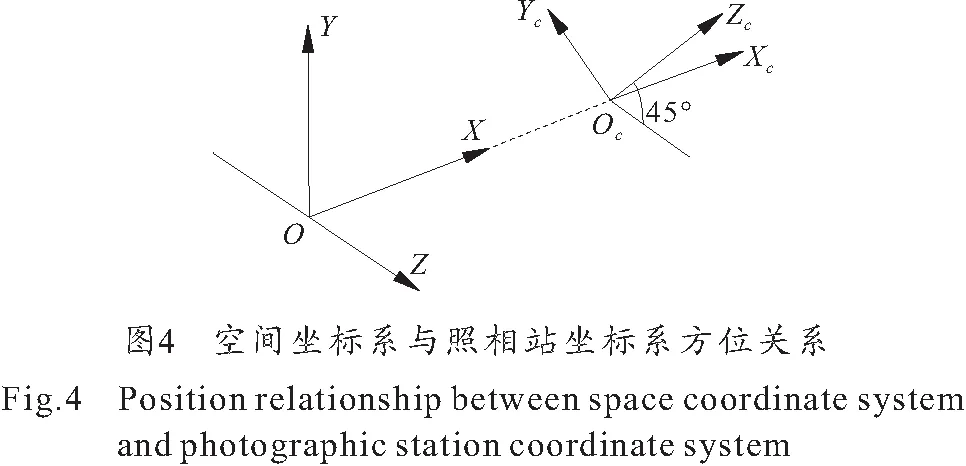
得到了特征点在两张照片的相机坐标之后,再进行一次坐标的平移即可将其转换为照相站坐标。被测对象的飞行特性最终是根据特征点的空间坐标得出的,所以仍需要进行一次坐标变换,将照相站坐标转换为空间坐标。图4为空间坐标系与照相站坐标系的方位关系图,两个坐标系之间夹角为45°且X轴方向相同。由于每个照相站在空间坐标系中的位置是固定的,利用与像素坐标到相机坐标相似的坐标平移和旋转方法即可完成这一过程。至此,已经实现了特征点像素坐标到空间坐标的转换。
在整个图像数据判读过程中,所有的工作都是在特征点的像素坐标基础上进行的,因此特征点像素坐标的识别是数据判读的关键步骤,也是需要解决的主要问题。
2 阴影图像数字处理
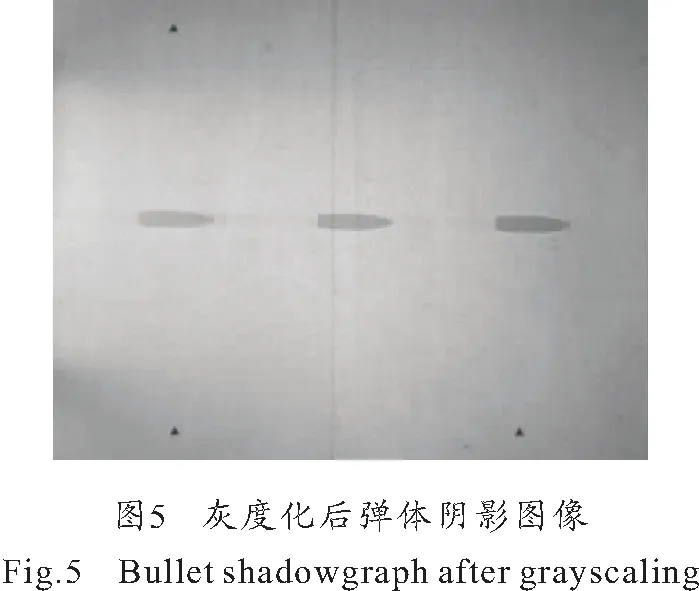
图5是一幅灰度化后的3次闪光弹体阴影图像, 图像上的3个黑色小三角形为相机坐标系标记点。为了识别出3个弹体的质心和轴线,首先需要提取弹体的轮廓。
对于轮廓的提取有很多种方法,其中微分算子法是一种经典的算法,它利用边缘临近一阶或二阶方向导数的变化规律来检测边缘[4]。目前比较常用的是Canny算子,它是在高斯平滑的基础上,得到边缘的强度和方向,通过阈值来检测边缘。取高斯函数为:
(3)
将高斯卷积模板分解为两个一维滤波器,得:
(4)
式中:
将这两个模板分别与图像f(x,y)进行卷积,得到:
(5)
令:
(6)
(7)
则A(i,j)反应点(i,j)处的边缘强度,a(i,j)反应梯度方向。判断一个像素是否为边缘点,需要满足以下条件:
1) 像素(i,j)的边缘强度大于沿梯度方向的两个相邻像素的边缘强度。
2) 与该像素梯度方向上相邻两点的方向差小于45°。
3) 以该像素为中心的3×3临域中的边缘强度的极大值大于某个阈值。
Canny算子的检测比较优越,能够检测出单像素边缘并且通过减少小模板检测中边缘中断保证边缘的完整性,在弹体轮廓的检测中也使用了Canny算子。但是,当对阴影图像进行预处理,包括图像灰度化和直方图均衡化之后,直接使用Canny算子进行边缘检测得到的效果并不好。这主要是由于图像的背景存在大量的杂散点和细纹干扰,使得检测后的弹体轮廓完全淹没在噪声里而无法分辨。因此,在边缘检测之前需要采取合适的滤波措施,最大限度地将背景噪声滤除。
图像中的噪声多为高斯白噪声,其往往分布在图像的高频区域。对于图像滤波处理就是通过滤波器将指定频带的能量进行有效地衰减而对于需要保留的频带能量进行增强。传统的滤波处理方法大多是采用傅里叶变换后的频率域乘法运算,这些滤波方法可以有效地降低噪声,但是变换后的频谱与源图像的相关性不强,在降噪的同时也滤去了一些有用的细节信息。基于小波变换的滤波方法则很好地解决了这一问题,小波变换与傅里叶变换不同,小波系数与原始图像存在空间上的对应关系,因此可针对小波系数的分布情况,设计不同的滤波器对不同的频带分别进行处理[5-6]。
基于小波的低通滤波过程如下:
1) 选择合适的小波和层数N,对图像进行N层的小波分解。
2) 根据小波系数的分布情况,按需要对相应高频带的小波系数进行衰减。
3) 进行小波逆变换,得到滤波后处理结果。
对预处理后的弹丸阴影图像使用基于小波的去噪方法进行处理,使用哈尔小波对其进行一层分解后结果如图6所示,可以看出图像的噪声较大且主要分布在水平、竖直和对角线3个方向的高频区域。针对此结果采用对高频带小波系数进行衰减的低通滤波方法取得的效果并不理想,对滤波后的图像进行边缘检测仍不能从噪声中分离出弹体的轮廓。注意到图像的噪声主要集中在高频部分,如果将高频部分全部滤掉就可以实现图像的去噪,但是图像的高频部分除噪声外,还包含了大量的边缘信息,完全滤除高频部分会造成图像细节的丢失。对于这一情况,采取了提取小波分解中低频图像的方法实现了低通滤波去噪。在图6所示的一层小波分解结果的基础上,使用Canny算子对各频带的小波系数进行边缘检测。由于噪声集中在水平、竖直和对角线3个方向的高频区域,只提取低频图像的边缘检测结果,得到的弹体边缘信息如图7所示。可以发现,使用这一方法达到了较好的降噪效果,边缘检测后分离出了完整的弹体轮廓。


3 特征点识别
根据测试工作的要求,需要的特征点包括弹体的质心和轴线点集。
质心的识别采用了轮廓矩的计算方法[7]。简单地说,轮廓矩是通过对轮廓上所有的点进行积分运算或求和运算而得到的1个粗率特征。对于1个轮廓I,定义其第(p,q)矩为:
(8)
式中:p对应x维度上的矩;q对应y维度上的矩。
此运算是对轮廓边界上所有的n个像素进行求和。当p和q为0时,得到轮廓的零阶矩M(0,0),其对应轮廓边界上像素点的数目。再求得轮廓的一阶行距M(1,0)和一阶列矩M(0,1),则可定义轮廓的质心(xavg,yavg)为:
(9)
质心(xavg,yavg)是轮廓I的平衡点,它使得xavg的左边和右边以及yavg的上边和下边的I(x,y)的质量是相等的。对于图7所示的3个弹体轮廓,使用此计算方法即可分别得到3个弹体的质心坐标。
弹体轴线的识别采用了方位约束框的方法,即使用沿着弹体主轴方位的包围轮廓的最小矩形对弹体的轮廓进行描述,如图8所示。

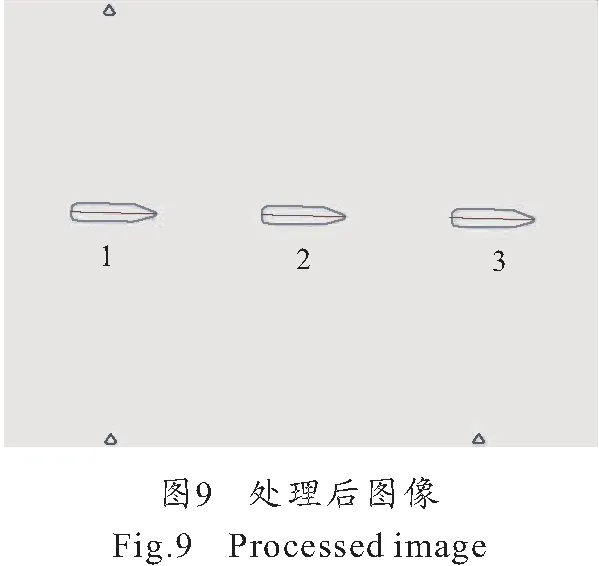
由于弹体的主轴方位和其外接矩形的主轴方位是相同的,因此可以将该外接矩形的轴线作为弹体轴线的估计。在计算弹体的空间姿态时,仅需要轴线上的两个点,所以在特征点识别结果中不需要给出轴线的全部点集。使用矩形框对弹体轮廓进行描述时,可以直接得到方位框的质心坐标,再结合方位框的宽度和高度以及主轴与水平方向的夹角,根据三角形定理可以求得方位框主轴两个端点的坐标。方位框的主轴也就是想要得到的弹体的主轴,如图8所示,方位框主轴的两个端点也可以用来近似表示弹体的弹头和弹尾,由此便得到了弹体轴线上3个点的坐标,任选其中两个就可完成弹体姿态角的计算。在处理后的图像上画出3个弹体轴线,如图9所示。
4 测试结果分析
阴影图像的处理和特征点的识别过程都在VC环境下进行了验证,得到测试结果如表1所示。
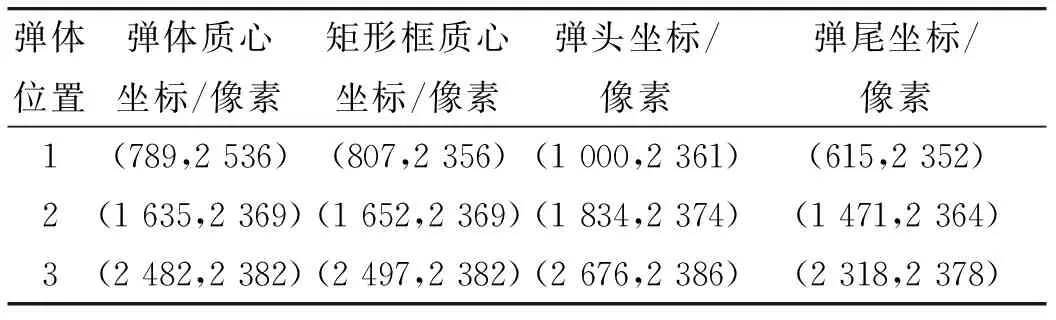
表1 特征点识别结果
比较测试结果中3个弹体的质心坐标和其外接矩形框质心坐标可发现这两个特征点的位置基本一致,仅横坐标存在差异,这基本符合弹体的形状特征,也从侧面验证了测试结果的准确性。识别出的弹体轴线情况如图9所示,在测试结果中除矩形框质心外,还给出了弹头和弹尾两个轴线上的点的坐标,可用于弹丸空间姿态角的计算。此测试结果只是针对单侧阴影图像求得的特征点像素坐标,在数据判读过程中需要综合左右两侧图像的特征点识别结果,并经过坐标变换得到特征点的空间坐标才能对测试结果做出最终评价。
5 结束语
针对数字式阴影照相系统所拍摄的高速弹体
图像的特点,提出的基于小波去噪和边缘检测的阴影图像处理及特征点判读方法与传统的人工干预的判读方法相比,使用此方法不但数据判读的精度更高,而且能够极大地提高效率,缩短数据处理周期,更好地满足工程测试的需要。
[1] LUO Hong-e, GU Jin-liang, CHEN Ping, et al. Velocity measurement based on orthogonal CCD shadow photograph system in ballistic range[J]. The Journal of China Universities of Posts and Telecommunications, 2010, 17(1): 127-130.
[2] 顾金良,陈平,夏言,等.数字式靶道阴影照相系统[J].弹道学报,2009,21(4):38-41.
GU Jin-liang, CHEN Ping, XIA Yan, et al. Digital ballistic range shadowgraph system[J]. Journal of Ballistics, 2009, 21(4): 38-41. (in Chinese)
[3] 刘世平,易文俊,顾金良,等.弹道靶道数据判读与处理方法研究[J].兵工学报,2000,21(3):201-204.
LIU Shi-ping, YI Wen-jun, GU Jin-liang, et al. A new method for image analysis and data extraction of projectiles in flight[J]. ACTA Armamentarii, 2000, 21(3): 201-204. (in Chinese)
[4] 郑友益,饶吉来,吴雷.数字图像几种边缘检测方法的比较分析[J].机械工程与自动化,2010(2):25-27.
ZHENG You-yi, RAO Ji-lai, WU Lei. Edge detection methods in digital image processing[J]. Mechanical Engineering & Automation, 2010, (2): 25-27. (in Chinese)
[5] PUYI LU, AIKO SATOU, MICHIKO MIYAMOTO, et al. Novel denoising technique based on filtering the coefficients of a redundant wavelet transform[J]. Optical Engineering, 2007, 46(4):043202-1-043202-6.
[6] 张欣,张定会,李鑫欣,等.基于小波变换的图像去噪研究[J].仪器仪表学报,2006,27(6):2284-2286.
ZHANG Xin, ZHANG Ding-hui, LI Xin-xin, et al. Image denoising based on wavelet transform[J]. Chinese Journal of Scientific Instrument, 2006, 27(6): 2284-2286. (in Chinese)
[7] RAFAEL C GONZALEZ, RICHARD E WOODS. 数字图像处理[M]. 北京:电子工业出版社, 2003: 530-535.
RAFAEL C GONZALEZ, RICHARD E WOODS. Digital Image Processing[M]. Beijing: Publishing House of Electronics Industry, 2003: 530-535. (in Chinese)