模糊PID方法用于液压比例阀的高精度定位控制
2012-11-18刘渭苗徐长安孙筵葳李宏伟
李 剑,刘渭苗,徐长安,孙筵葳,李宏伟
(中国重型机械研究院有限公司板带精整研究所,陕西 西安 710032)
0 前言
随着我国钢铁行业的蓬勃发展,钢铁行业生产线对全自动功能的需求也越来越多,其中对比例阀的定位控制精度的要求也越来越高,但使用较高控制精度的比例阀新产品成本太大。本文提出一种模糊PID控制方法,通过软件配合具有一定精度的比例阀来提高其控制精度,改进控制效果,并应用于比例阀高精度定位控制系统中。
1 控制原理
在比例阀的控制系统中,液压站为比例阀和油缸提供动力,电源模块为比例阀提供电源。控制原理如图1所示,PLC控制模拟量输出模块为比例阀提供-10 V~+10 V的模拟量信号,绝对值编码器反馈的脉冲数乘以脉冲当量计算得到油缸的实际行程,定位要求的设定值减去编码器计算的实际行程得到定位误差,定位误差作为PID调节器的输入,然后PID调节器输出电压信号给模拟量输出模块,以达到对比例阀的定位控制。

图1 控制原理图Fig.1 Control principle of valve system
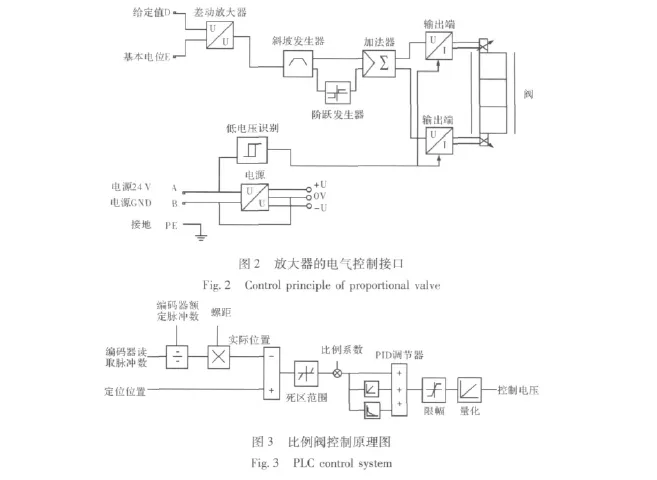
(1)比例阀。比例阀的控制主要是通过比例放大器来实现,以内置式比例方向阀为例,比例阀放大器就在阀上集成,通过给放大器的D与E接口输入不同的电压值(0~±10 V)就可以实现控制,此电压值近似正比于流量(即油缸的速度),而电压的正负即对应着油缸的方向(即油缸上升或下降),放大器的电气控制接口如图2所示[1]。
(2)PLC控制系统。PLC控制系统利用PID调节器来对比例阀的输入电压值进行控制,编码器读取的脉冲数除以绝对值编码器额定脉冲(单圈脉冲数),然后乘以螺距,得出油缸行程的实际位置。设定的定位位置减去编码器测量的实际位置,得到控制误差量,误差量经过PID调节器就得到比例阀所需要的控制电压。控制原理见图3。
2 控制方案
对于比例阀不同的工作区间,需要设定不同的PID参数,当比例阀定位误差较大时需要给定一个较大的比例参数、一个较小的积分常数和一个较小的微分参数,来对控制误差进行放大,并减小响应时间,而不用太多考虑稳态误差;当比例阀定位误差较小时候,则需要给定一个较小的比例参数,并配合一个较大的积分和较大的微分参数来实现准确的定位控制,如表1所示。
模糊控制器和常规的控制器相比较无需建立控制对象的数学模型,对被控对象的时滞、非线性和时变性具有一定的适应能力等优点,同时对干扰也有较强的抑制能力,即鲁棒性较好。FUZZY—PID控制器的复合方式来控制比例阀这样一个高阶、非线性、强耦合的控制对象不失为一个好方法,用模糊规则使控制器在不同的工作区间自适应调整 PID 参数值[2,4]。
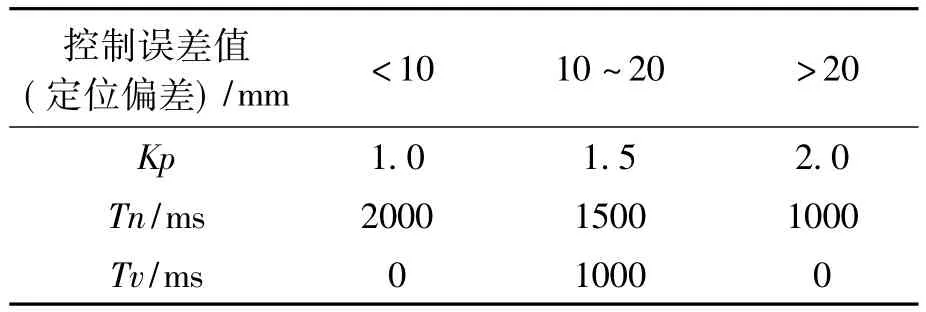
表1 PID参数对应比例阀在不同工作区间的值Table 1 PID parameters corresponding to values of proportional valve in different operating regions
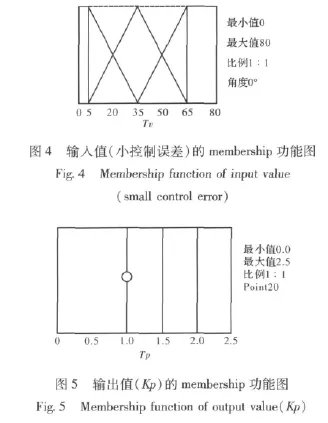
首先编辑模糊控制器的输入值:对于每个控制误差区间定义不同的参数功能,参照表1输入参数(控制误差值)。对应于定位偏差小于10 mm为小误差,定位偏差小于20 mm并且大于10 mm为中误差,定位偏差大于20 mm为大误差。
同理编辑输出变量Kp、Tn、Tv的参数功能。KP有三个 1.0、1.5、2.0,Tn有三个 2000、1500、1000,Tv有两个 1000、0;分别为小、中、大。Kp的功能如图4、图5所示。
对PID参数进行模糊修正的过程中,模糊控制器的性能对系统的控制特性影响很大,而模糊控制器的性能在很大程度上取决于模糊控制的规则和规则的可调整性[5]。根据成员功能和表1,定义模糊规则表见如表2。
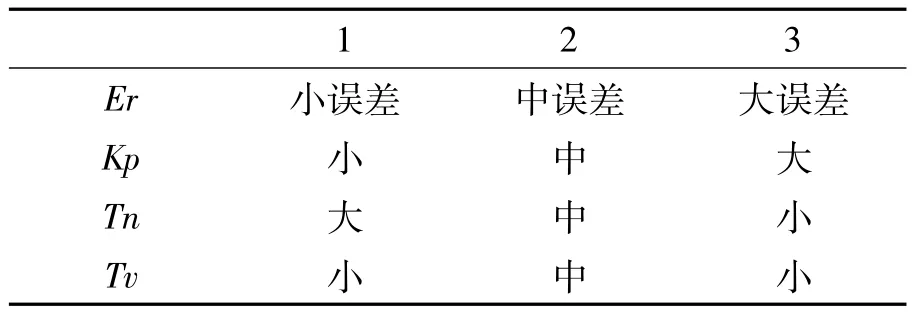
表2 模糊规则表Table 2 List of fuzzy rules
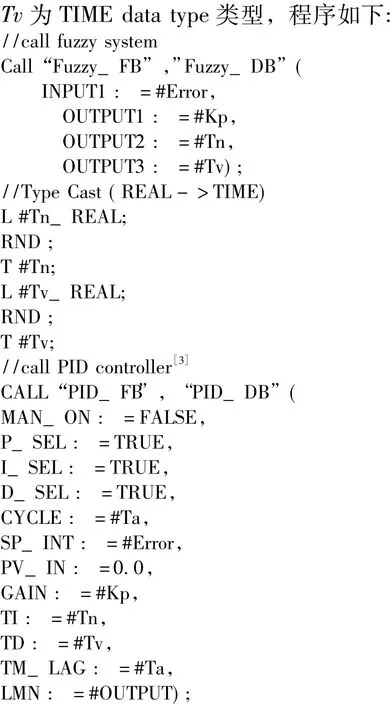
整个系统设计完毕,在PLC系统中为模糊控制器和PID控制器建立两个DB块,命名为fuzzy data block和PID data block。在SIMATIC S7系统中以AWL代码的形式调用模糊控制和PID控制的FB块,其中Kp变量为real类型,Tn和
3 实验结果
在广州某重卷机组中对自动上卷功能中上卷小车的比例阀进行定位控制,采用SIMATIC S7-400作为基础控制器件,编写并调用模糊控制和PID控制FB块来进行比例阀控制,采用绝对值编码器对比例阀油缸位置进行测量,选取表1中的第1组和第3组参数作为PID调节器的固定参数和模糊控制PID的变参数进行实验比较,监控曲线如图6所示。

图6 模糊PID与常规PID试验比较Fig.6 Experimental comparison of fuzzy PID and conventional PID
从实验结果可以看出模糊PID在响应开始时响应速度很快,但到达规则切换点以后响应趋于平稳,在稳态误差范围之前微分参数起作用使系统很快达到稳态。整个系统克服了输出电压过快变化带给比例阀的抖动和输出电压过慢带给比例阀的死区不响应。整个过程比例阀输出平稳,定位精度高,并且动态过程响应快,超调量小,稳态误差小,是一种可以采用并推广的好方法。
[1] FESTO.电磁阀样本[K].2010:60-63.
[2] 李国勇.一种新型的模糊PID控制器[J].系统仿真学报,2003(10):1492-1493.
[3] 西门子公司.PID control样本[K].2010:26-29.
[4] 钟庆昌,谢剑英,李辉,等.变参数PID控制器[J].信息与控制.1999,28(4):273-276.
[5] 金以慧.过程控制[M].北京:清华大学出版社,1998.
