三相异步电动机的制动方式比较
2012-11-10穆素祥
穆素祥
(山西阳煤集团职工教育培训中心,山西 阳泉 045000)
三相异步电动机的制动方式比较
穆素祥
(山西阳煤集团职工教育培训中心,山西 阳泉 045000)
三相异步电动机的应用最为广泛,当其停转或由高速进入低速时,需要制动。三相异步电动机的制动分为机械制动和电气制动两种;电气制动分为能耗制动、反接制动、回馈制动三种。分析三相异步电动机制动方式的优缺点对实际应用中选择合适的制动方式很有指导意义。
异步电动机;制动方式;特性分析
三相异步电动机的应用最为广泛,当其停转或由高速进入低速时,需要制动。制动的本质是:在其转轴上施加一个与其旋转方向相反的力矩,使其停转或从高速降至低速;所以,制动也称强行减速。为了获得良好的制动性能,满足制动要求,需要采用不同的制动方式。三相异步电动机的制动方式分为:机械制动和电气制动两种。
1 机械制动
采用机械制动的电磁抱闸的优点是:停车准确,不受中途断电或电气故障的影响。制动力矩在一定范围内可以克服任何外加力矩。例如提升重物时,由于抱闸的作用力,可使重物停留在需要高度,这是电气制动所不能达到的。缺点是:制动时间越短,对设备的冲击越大;电动机的轴伸端需装机械制动装置,这对某些空间位置较紧凑的生产机械会有一定困难。机械制动方式一般用在起重卷扬机等设备上。
2 电气制动
电气制动又称电磁制动,原理是使电动机产生与其旋转方向相反的电磁转矩,以阻止电动机的旋转。
2.1 能耗制动方式
能耗制动方式是将电动机的定子绕组从交流电源断开后,立即通入直流电流制动,使其系统原来储存的机械能将转化为电能消耗在转子电阻上,因此称为能耗制动。制动时的机械特性曲线,见图1。

图1
曲线1是转子不串电阻制动时的固有机械特性;曲线2是增大直流电流时的机械特性;曲线3是增大转子电阻时的机械特性。由图1知,外加直流电压或电流越大,初始制动转矩越大,制动时间越短。对笼型异步电动机,为增大初始制动转矩,要增大直流电流;但不能过大,以免造成电动机过热。对绕线型异步电动机,可用增加转子电阻来增大初始制动转矩。
制动过程分析:制动前,电动机运行在固有机械特性曲线的A点;制动瞬间,由于转速不能突变,由A点平移到曲线1的B点;制动转矩作用下的电动机开始减速,工作点沿曲线1变化,直到n=0,Tem=0。如果拖动的是反抗性负载,则电动机停转,实现了快速停车。如果拖动的是位能性负载,当转速降为零时,若要停车,必须立即辅以机械制动;否则,电动机将在位能性负载转矩的作用下反转,直到进入第四象限的C点(Tem=TL)为止,重物将保持匀速下降状态。
因此,能耗制动的优点是:操作简便,能使反抗性负载准确停车,制动平稳,制动也较经济。缺点是:制动至转速较低时,制动转矩较小,制动时间较长,制动效果不太理想。
2.2 反接制动方式
2.2.1 电源反接制动方式
电源反接制动方是将交流电源三相中的任意两相对调(改变电源相序),使旋转磁场方向与转子转动方向相反,起到制动作用。制动时的机械特性曲线,见图2。

图2
曲线1是电动机电动状态时的固有机械特性;曲线2是电源反接制动时的机械特性;曲线3是绕线型异步电动机转子串入制动电阻时的机械特性。
制动过程分析:制动前,电动机运行在固有机械特性曲线的A点;制动瞬间,由于电动机的转速不能突变,工作点由曲线1的A点平移到曲线2的B点;工作点沿曲线2移动,当到达C点时n=0,制动结束。若要停机,应立即切断电源;否则,电动机将反向旋转。对绕线型异步电动机,为限制制动电流,增大制动转矩,通常在定子两相反接的同时,在转子绕组中串接制动电阻。据此,电源反接制动方式适用于要求正反转运行的系统,一般适用于反抗性负载。
2.2.2 倒拉反接制动方式
倒拉反接制动也称转速反向反接制动。当电动机提升位能性负载时,如果电枢回路串入较大电阻,就会出现拖动力矩小于负载力矩的情况,这时会在负载作用下,使电机转向改变、电动势反向,直至达到新的力矩平衡点。制动时的机械特性曲线,见图3。曲线1是电动机电动状态时的固有机械特性曲线;曲线2是转子回路串入电阻时的曲线。
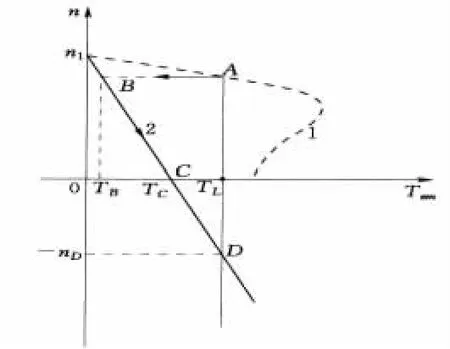
图3 倒拉反接制动特性曲线
制动过程分析:当串入电阻的瞬间,因转速不能突变,工作点由A点平移到B点,并沿曲线2运行,当到达C点时n=0,对应的电磁转矩TC仍小于负载转矩TL。这时,电动机在提升重物的倒拉下开始反向旋转,并加速至D点,重物将匀速下放,在C点到D点这一区间,转速n<0,与定子旋转磁场转向相反,电磁转矩成了制动转矩,负载转矩成为驱动转矩,拉着电动机反向旋转,故称倒拉反接制动。
这种制动方式只适用于绕线型异步电动机拖动位能性负载的情况,(例如,起重机低速下放重物),能使重物获得稳定的下放速度。所述两种反接制动的共同点是:转差率s>1,优点是制动迅速、制动时间短;缺点是制动时能耗大,经济性较差。
2.3 回馈制动
回馈制动是在电动机转向不变的条件下,使转子转速大于同步转速,实际上是异步电动机变为异步发电机,也称再生发电制动。
2.3.1 正向回馈制动
正向回馈制动方式是异步电动机采用变极或变频调速中的制动。
制动时的机械特性曲线,见图4。

图4 正向回馈制动特性曲线
制动过程分析:制动前,电动机的工作在曲线1的A点;当电动机采用变极或变频调速时,特性变为曲线2,同步转速变为n1';在变极或变频瞬间,由于转速不能突变,工作点由A点平移到B点。这时转速nB>0,且 nB>n1',电磁转矩 TB<0;所以电动机处于制动状态。由B点到n1'点变化过程就是回馈制动状态,从n1'点到C点的变化过程为电动状态的减速过程,C点是调速后的稳定工作点。由于回馈制动中,机械特性是第一象限正向电动机状态曲线在第二象限的延伸,故称正向回馈制动。这种制动适用于笼型异步电动机采用变频或变极调速的场合。
2.3.2 反向回馈制动方式
反向回馈制动是改变定子电源相序在下放重物时采用的制动方式。制动时的机械特性曲线,见图5。

图5 反向回馈制动特性曲线
制动过程分析:A点是电动机提升重物时的工作点;定子两相反接瞬间,工作点由A平移到B;电动机经过反接制动过程(工作点从B到C),和反向电动机加速过程(工作点从C到-n1);最后在位能性负载作用下反向加速并超过同步转速,直到D点保持稳定运行(匀速下放重物)。由-n1(反向同步转速点)到D点的过程就是回馈制动过程。回馈制动中,n<0,Tem与n反向,机械特性曲线是第三象限反向电动状态曲线在第四象限的延伸,故称反向回馈制动。
制动的优点是:这种电动机转子的转速高于同步转速,即n>n1,向电网回馈电能,经济性较好;缺点是:给电网带来了一定的污染。
3 结束语
综上所述,电气制动方式的共同特点是:在保持原来磁场大小和方向不变的情况下,只改变电枢电流的方向,或转速的方向,以获得电磁制动转矩。为了满足不同负载的运行要求,电动机需要采取不同的制动方式。经对三相异步电动机的不同制动方式(机械特性曲线和优缺点)的分析可知:实际使用中,要按负载情况和使用场所选择合适的制动方式,才可保证电动机的安全可靠运行。
[1]周鹤良.电气工程师手册[M].北京:中国电力出版社.2008.
[2]伍斌.电力拖动与控制[M].徐州:中国矿业大学出版社.2000.
[3]赵君有,张爱军,王东瑞.电机与拖动基础[M].北京:中国水利水电出版社.2007.
Brakingmodes'Comparison of Three-phase Asychronousmotor
MU Su-xiang
(Employee Education and Training Center,Yangquan Coal Group,Yangquan Shanxi045000)
Three- phase asynchronous motor is the most widely used. When it halts or turns from highspeed to low speed, braking is needed. There are two braking modes of the asynchronous motor: mechanicaland electrical braking. Electrical braking has three modes: energy consumption braking, plug braking, andfeedback braking. The comparison analysis of those brakings is very significant for the type selection inpractice.
asynchronous motor; braking; characteristics analysis
T D 322
A
2011-10-20
穆素祥(1971—),女,山西平定人,本科,工程师,研究方向为电机应用。
刘新光