类ATLLAS-M6运输机气动布局分析与设计
2012-11-08肖光明桂业伟
肖光明,冯 毅,唐 伟,桂业伟
(1.中国空气动力研究与发展中心 空气动力学国家重点实验室,四川 绵阳 621000;2.清华大学 航天航空学院,北京 100084)
0 引 言
2003年10月,英国和法国联合研制的超声速民用运输机“协和客机”全部停飞,自此,民用运输机的飞行速度始终无法突破声速。尽管如此,通过超声速飞行,实现运输机的远距离、快速到达,一直是人们追求的重要目标。而要实现高速飞行,运输机的动力系统通常起着决定性的作用。
近些年来,随着国内外各种高超声速计划的开展,吸气发动机及其组合发动机的关键技术不断取得突破并走向成熟。其中,美国Hyper-X计划研制的X-43A于2004年3月及11月先后成功进行了两次试验飞行,其装载的超燃冲压发动机分别在 和 的状态下工作了一段时间。与此同时,美国空军研制的X-51验证机也于今年5月份进行了首次飞行试验。一旦高超声速推进技术取得突破和应用,飞行速度Ma=5~6、航程达数万公里、各大洲之间2小时即可到达的洲际高超声速运输机将成为现实可能,这将极大加快人类社会的运作节奏,在全球范围内实现人员和物资的快速运输。
高超声速运输机作为高超声速技术的进一步发展目标,在国内外也得到了相关研究机构的关注[1-3]。早在20世纪80年代,美国NASA的技术报告中就曾提出了以涡喷-亚燃组合发动机(TBCC)为动力、飞行速度为马赫数6的高超声速巡航运输机(HYCAT)概念设计,并对多种布局形式进行了气动特性评估,最终确认了 HYCAT-1A 的优化方案[4-5]。而在 2005-2006年欧空局先后发布的LAPCAT和ATLLAS两项研究计划中,以TBCC为动力的M6飞行器也被列为主要设计内容。期间,德国宇航中心的J.M.A.Longo[6-7]在 HYCAT-1A 外形的基础上,运用多学科设计优化方法(MDO),得到了ATLLAS-M6的气动布局方案,如图1所示。目前,关于ATLLAS-M6运输机的研究仍处于概念设计阶段。

图1 ATLLAS-M6CAD模型Fig.1 The CAD model of ATLLAS-M6
本文主要针对ATLLAS-M6的气动外形(不含吸气式进气道部分),利用基于类型函数和形状函数的 CST(class function and shape function transformation technique)方法[8]进行了参数化建模,计算了其主要气动力,分析了该气动布局的主要特点,并重点研究了其配平特性、稳定性等问题。
1 参数化建模
用CST方法进行参数化建模,主要是通过选取适当的类型函数初步确定运输机机身主要控制站位上横截面的基本形状,并利用形状函数来确定其精确形状,在此基础上根据纵向控制线生成其余横截面。图2给出了采用CST方法生成的类ATLLAS-M6运输机机身主要控制站位横截面及纵向控制线。在J.M.A.Longo等的文章中,其机身曲面生成采用的是NURBS方法,设计参数多达100,而本文运用CST方法生成机身横截面,整个机身的设计参数只有16个,使得其外形的进一步优化设计得到了较大简化。

图2 机身横向站位横截面与纵向控制线Fig.2 Fuselage cross sections and control lines
此外,本文还对类ATLLAS-M6的主要控制面进行了初步设计,如图3所示。其中,方向舵主要用于运输机的横向配平及偏航控制;升降舵主要用于纵向配平和俯仰控制;而副翼则主要用于控制运输机的滚转。

图3 类ATLLAS-M6控制面Fig.3 Control surfaces of ATLLAS-M6analog
2 气动布局特点分析
高超声速运输机的基本要求包括:运行成本低、可靠性高、发射准备周期短、运作简单、安全性高等。高超声速运输机需要经历加速爬升、高超声速巡航、减速下滑及低速进场着陆等过程,因此在气动布局设计时就必须充分考虑高超声速巡航效率和低速及加速性能。除动力系统及燃料系统以外,科学决策巡航高度及速度十分重要,ATLLAS-M6运输机的主要设计指标包括:(1)载客200人;(2)航程7000km;(3)巡航速度Ma=6;(4)飞行高度30km。这些设计指标是综合考虑了动力系统、热防护系统、经济性以及技术成熟度后得到的。例如,如果将长时间巡航飞行速度提高到马赫数7以上,就必须对飞行器进行全方位的详细的热防护,这必然增大飞行器的空重,降低高超声速飞机的经济性。
从气动布局方式看,以吸气发动机为动力的高超声速飞行器主要有三类,一类是适用于类似Hyfly高超声速巡航导弹的锥柱类细长紧凑外形,一类是类似NASP的升力体外形,一类是类似X-51及HTV-3x的类乘波体外形。ATLLAS-M6运输机气动布局具有小展弦比双三角翼、中心垂尾、上置平尾、细长升力体机身等特征。
就高超声速运输机的气动布局设计而言,高超声速巡航气动特性及低速起飞着陆性能是必须同时兼顾的主要要求。例如,针对起飞着陆进行外形优化后的机翼对于高超声速巡航就会过大,因此机翼外形必须进行折衷处理。高超声速巡航飞行及加速爬升消耗的燃料约占运输机全部燃料的大部分,这就要求运输机有足够大的空间储存燃料,同时飞行过程中燃料的消耗还会引起飞机重心的变化,而重心变化会引起配平攻角变化并带来升阻变化,设计时必须根据飞行规划设计配平攻角后再确定燃料的使用和流动方式。此外,飞行马赫数的增高降低了运输机的横侧向稳定性,平尾及垂尾设计就必须有足够大的尾容量,方向舵及升降舵就需要与燃料消耗后的重心进行充分的统筹协调,同时充分考虑高超声速小攻角巡航及大攻角起飞着陆的稳定性及操纵性需求。
ATLLAS-M6运输机采用了机身腹部下挂吸气式发动机方案,机身设计就必须首先考虑如何为吸气式发动机提供足够大的流量捕获能力、气流压缩能力及与发动机匹配的入口条件。典型的高超声速进气道气流压缩方式主要包括二元进气道(如X43A、HYSHOT)、轴对称进气道(如HRE)、侧压进气道和流线跟踪进气道(如Japhar、X-51)等。ATLLAS-M6运输机选择的是侧压进气方式,其机身的前体相对较长,通常采用多级分段压缩形式,且需要进行机身前体/进气道一体化设计,以确保发动机的捕获流量系数、总压恢复系数、畸变系数、进气道起动特性、喉道马赫数、喉道扩压比、进气道阻力等性能满足要求。另一方面,为了确保发动机推力及发动机产生的力矩满足要求,机身后体构型也需要与发动机尾喷管进行一体化设计。J.M.A.Longo等在进行ATLLASM6外形优化时采用了16个变量的机体/进气道一体化设计,本文尽管不考虑吸气式发动机部分,但在建模时对机身前体下壁面采用了三段式设计,给出了参数化的分段压缩比及后体参数化构型,为未来进一步的机体/进气道一体化设计提供了便利。
为提高运输机高超声速小攻角巡航状态下的升阻比,ATLLAS-M6机身采用了较扁平的横截面形状,充分利用了非圆截面迎风面及背风面更大的压差来获得比圆截面更大的升力。扁平机身和较大的机身长细比λ降低了运输机的机身容积率,为保证有效载荷空间和燃料储存空间,使运输机的机身容积达到设计要求,通常需要增大机身的长度,而这又进一步增大了运输机的阻力和结构重量,给发动机设计带来了更大的负担。因此,气动布局设计时还必须将运输机尺寸、燃料重量、有效载荷、航程、结构重量等与动力系统进行一并的综合考虑。
高超声速飞行时的机翼平面形状比翼型更重要,而且考虑到机翼的翼载荷较大,ATLLAS-M6运输机采用了薄的小展弦比双三角翼。由于本文不考虑吸气式发动机,因此机翼的布置相对靠后以配平机身前体产生的抬头力矩,一旦考虑发动机热喷流,机翼位置有可能需要进行调整。受尾喷管设计的影响,ATLLAS-M6运输机采用了中心垂尾和上置平尾布局,尾容量比较大,稳定性较好。
本文根据ATLLAS-M6运输机气动布局的上述特点,对其外形进行了初步设计,选取机身长度为108.09m,翼展为31.21m,长细比为16.8,机身最大高度为最大宽度的一半,质心系数为0.551。同时,在考虑了运输机表面摩擦阻力的情况下,对其气动特性进行了估算。结果表明,在飞行高度为30km、飞行马赫数为6时,其配平攻角约α0为4°,升阻比L/D能达到5.0,此时运输机机身的容积约为2198m3。
3 气动特性计算与分析
针对类ATLLAS-M6运输机的外形特点,本文采用了Dahlem-Buck公式估算迎风面的压力系数,而背风面则采用了Prandtl-Meyer公式进行修正[9]。同时,表面摩擦阻力系数运用了平板近似理论进行估算。这些估算方法主要应用于高超声速飞行器的气动特性预测,并得到了部分风洞试验结果和数值计算结果的验证,其计算精度基本满足方案论证和初步设计阶段的精度要求。
图4给出了类ATLLAS-M6运输机在不同马赫数Ma下的升力系数CL与阻力系数CD极曲线变化规律(飞行高度30km,控制面无舵偏,参考面积取为机身最大截面积,攻角α变化范围:0°~20°)。可以看出,整个极曲线变化较为陡峭,其对应的升阻比也比较大,而且随着马赫数Ma的提高,其最大升阻比有所降低。同时,在马赫数Ma=4~7范围内,零升阻力系数随着马赫数的增大而减小,在Ma=6时,其值约为0.16。

图4 极曲线Fig.4 Lift and drag polar
图5给出了相同计算条件下类ATLLAS-M6运输机的配平特性及对应的摩擦阻力系数。可以看出,在马赫数Ma=4~7范围内,能获得4°左右的配平攻角,升阻比CL/CD也在5附近,其配平特性能满足设计要求。此外,在巡航配平状态下,运输机表面摩擦阻力在总阻力中所占的比例(Cf/CD)也相对较大。因此,在计算类ATLLAS-M6运输机升阻比时,摩擦阻力的影响不可忽略。
类ATLLAS-M6运输机横侧向保持良好的稳定性是其需要满足的一项主要指标,图6和图7分别给出了飞行高度为30km,巡航马赫数为6,各控制面无舵偏时的静、动稳定导数。其中,在计算方向静稳定导数Cnβ时,采用的是右手坐标系,且定义正的侧滑角产生正的侧向力,因而当Cnβ为正时,偏航是静稳定的。此外,俯仰静稳定导数Cmα、滚转静稳定导数Clβ以及俯仰、偏航和滚转阻尼导数Cmq、Cnr和Clp均小于零,是满足静/动稳定的。其中,由于机身前体采用的是三段式设计,Cmα的变化曲线会出现三个波峰。而机身后体由于经过Prandtl-meyer公式修正会形成负压区,从而产生一个较大的抬头力矩,为了使运输机满足俯仰静稳定,本文在ATLLAS-M6原有布局设计上将机翼的位置向后进行了移动,同时适当增加了平尾的翼面面积。而真实情况下,吸气式发动机的热喷流作用于机身后体将产生低头力矩,阻力也会增加,这对运输机的配平特性及升阻比都有较大的影响。在本文的后续工作中,将进行机身前体和后体构型与吸气式发动机进气道的一体化设计,完善对运输机的气动特性分析。

图5 配平特性及摩擦阻力Fig.5 Trim characteristic and friction drag

图6 静稳定性Fig.6 Static stability
进一步分析类ATLLAS-M6运输机的俯仰配平效率,包括升降舵和副翼的偏转对俯仰配平的影响。定义两者后缘向下偏转为正,图8分别给出了飞行高度为30km,巡航马赫数为6时升降舵和副翼的俯仰配平效率。从控制面参数的初步选取结果来看,升降舵的俯仰配平效率要高于副翼的配平效率,但两者效率很接近,其主要是由于升降舵的控制面积相对较小,同时机翼的位置安装也比较靠后。为了提高升降舵的俯仰控制效率,可以考虑采用平尾全动的方式进行控制。当然,运输机控制面参数的选取不仅仅取决于其巡航状态下的配平特性,还要考虑起飞时的增升特性、加速爬升段大攻角飞行的配平特性以及着陆时的减速特性等等。

图7 动态稳定性导数Fig.7 Dynamic stability
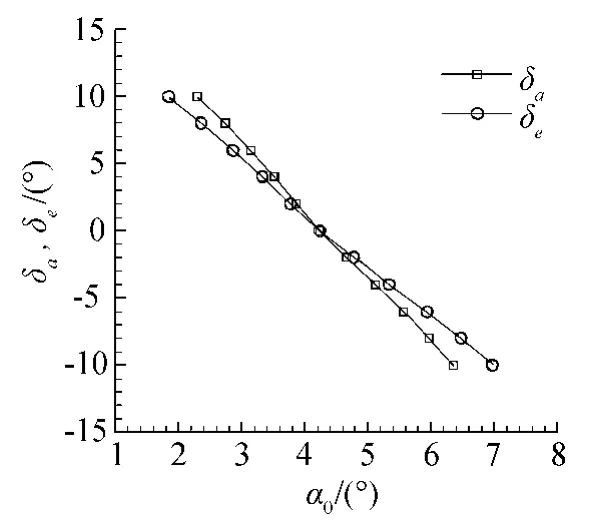
图8 俯仰配平效率Fig.8 Trimming effectiveness
4 结 论
本文主要研究了ATLLAS-M6运输机的布局特点,并利用基于类型函数和形状函数的CST方法对其进行了参数化建模。经过初步的计算分析表明,类ATLLAS-M6的气动特性能基本满足高超声速运输机的设计指标,其气动布局方案是可以借鉴的。
当然,在进行高超声速运输机气动布局设计时,除了其气动性能,还有很多因素的约束和影响需要进一步研究与分析。例如由于吸气式发动机的燃料为液氢,其密度较低,为了保证航程内燃料充足,在进行机身设计时其容积首先必须满足需求;还有高超声速飞行带来的热防护问题,包括热环境的计算、热防护形式的选择等对运输机的外形设计和结构配重都有重要的影响;此外,高超声速运输机要用于载客还必须考虑乘客如何适应其特殊飞行环境的问题,如从起飞至达到马赫数为6的巡航状态之间存在的加速过载以及音爆等;同时由于运输机机身较长,且气动载荷较大,其结构变形也会带来一系列难题。总之,要完善运输机的气动布局设计,需要考虑的因素还有很多。本文将在进一步的研究工作中,综合考虑结构重量、热防护性能等因素的影响,在参数化外形生成的基础上,运用多学科优化设计方法对其气动布局进行优化设计。
[1]DOUGLAS E W.A study of hypersonic aircraft[R].NASA TM X-56001,1964.
[2]WALKER S,TANG M,MAMPLATA C.TBCC propulsion for a Mach 6hypersonic airplane[R].AIAA-2009-7238,2009.
[3]HARLOFF G J,BERKOWITZ B M.NASA-hypersonic aerospace sizing analysis for the preliminary design of aerospace vehicles[R].NASA CR-182226,1989.
[4]MORRIS R E,BREWER G D.Hypersonic cruise aircraft propulsion integration study volume I/II [R].NASA Contractor Report CR-158926-1,1979.
[5]ELISON J C.Investigation of the aerodynamic characteristics of a hypersonic transport model at Mach number to 6[R].NASA TN D-6191,1971.
[6]LONGO J M A,DITTRICH R,BANUTI D.Concept study for Mach 6transport aircraft[R].AIAA 2009-435.
[7]LONGO J M A,DITTRICH R.Preliminary design of a Mach 6configuration using MDO approach[A].Proceedings of the 16DGLR-Fach-Symposium der STAB[C].Aachen,Germany,November 2008.
[8]KULFAN B M.A universal parametric geometry representation method-"CST"[R].AIAA-2007-62,2007.
[9]黄志澄.高超声速飞行器空气动力学[M].北京:国防工业出版社,1995.(HUANG Z C.Aerodynamics of hypersonic vehicle[M].Beijing:National Defense Industry Press,1995.)
