基于光谱角时序不变性的红外目标识别
2012-11-06许伟琳武春风逯力红侯晴宇
许伟琳,武春风,逯力红,侯晴宇
(1.武汉大学 遥感信息工程学院,湖北 武汉430079; 2.湖北航天技术研究院总体设计所,湖北武汉430034;3.天津工业大学理学院,天津300387;4.哈尔滨工业大学空间光学工程研究中心,黑龙江哈尔滨150001)
1 引言
目标探测识别方法[1-3]的研究是基于空间几何特性原理和运动轨迹时序特性原理展开的,在理论研究与工程实践中应用比较广泛。然而,随着新型红外有源及无源诱饵的发展,其在宽波段的辐射特性以及运动特性可用于有效模拟目标,因此,依据上述两种原理展开的识别算法遇到了新的挑战[4]。
多光谱识别技术以物质构成的光谱唯一性为基础,将目标的几何、运动4维信息扩展为5维信息来增加光谱信息。目标的识别以光谱信息为第一特征,形态学和运动学为辅助特征,在充分挖掘空间、时间信息的基础上,通过融合窄带红外多光谱信息来识别目标,提高识别精度和抗干扰能力[5]。文献[6]根据真实目标与诱饵在毗邻的子波段光谱连续性不同的特点,以图像相关系数作为识别依据,形成了基于多光谱图像相关性的目标识别算法。文献[7]提出了多周期推理模型,并将其应用于红外点目标的多光谱识别。
本文以空间目标和气球诱饵为研究对象,从空间物体温度时变的物理原理出发,分析并证明了空间目标与气球诱饵在温度时变特性上存在差异。为了利用多光谱辐射功率反演物体温度时变特性,刻画光谱曲线的时序变化,提取了时序光谱角作为识别特征,进而提出了基于光谱角时序不变性的目标聚类识别方法。
2 红外多光谱识别算法机理
物体的光辐射特性可以归纳为空间特性、时间特性和光谱特性。空间特性描述光辐射的空间分布;时间特性指光辐射随时间的变化规律;光谱特性指光辐射随波长的分布。新型红外诱饵在空间特性上能够有效模拟目标的几何形状,这使得利用辐射的空间分布进行目标识别无效。光谱能量分布是物质固有属性之一,不同物质的辐射光谱曲线不同。因此有效的辐射识别算法有必要引入光谱特性差异,并将光谱特性与时间特性融合起来提取时序光谱差异作为主要识别特征。大多数红外诱饵以灼热粒子、气体、热烟等几种不同的选择性辐射源共同向外辐射能量,如典型DM19“巨人”红外诱饵[8],其在光谱特性上通过热烟(8~12 μm)、灼热颗粒(3 ~5 μm)的组合模拟船体、烟囱和火舌的信号特征,在空间特性上通过5发诱饵弹的有序排列模拟舰船形状。在试验中,用这种诱饵弹成功诱骗了多种红外成像识别系统。对于这种具有选择性光谱特性的诱饵和具有灰体光谱特性的目标识别,可以采用文献[6]提出的基于多光谱图像相关性的识别算法,它主要利用真实目标与诱饵在毗邻的子波段光谱连续性上的差异提取识别特征。
另外,在对抗远距离大气层外拦截器方面多采用气球无源诱饵。通过在气球表面涂漆的方法改变蒙皮的吸收率和发射率,从而改变气球表面的平衡温度,用来模拟真实目标的灰体红外信号特征。可见,这种类型的诱饵在光谱特性上与目标具有较高的相似度,单纯利用光谱特性无法有效聚类识别,因此,有必要融合时序光谱变化特征来提高识别效率。
3 目标与诱饵温度时变特性分析
考虑各种热源对空中目标加热的影响,其热平衡方程[9]可写成:

式中:Qtot为目标的总热量;Qa为气动加热;Qs为太阳加热;Qes为地球和天空辐射加热;Qsw为激波加热;Qdr为分解或复合加热;Qsc为表面组合加热;Qr为辐射热传递;Qi为目标内部热传递。
根据温度变化与能量变化关系方程求解目标的温度,即:
式中:T为蒙皮温度,Cp,ρ,d分别为蒙皮的比热、密度和厚度。
对于距离地面高度在100 km以上的空间目标和诱饵,热交换红外辐射主要包括蒙皮的灰体辐射、蒙皮反射的太阳辐射以及吸收地球的辐射。因此,空间目标式(2)简化为:

对于气球诱饵,式(2)简化为
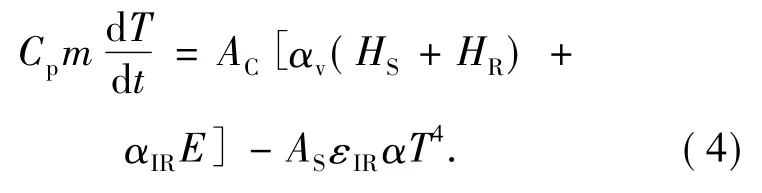
式中:AS,AC分别为气球的表面积和平均截面积;m为气球质量;αv,αIR,εIR分别为蒙皮材料在可见光和近红外波段上的吸收率、蒙皮材料在红外波段上的吸收率及蒙皮在红外波段上的平均发射率;f为垂直于太阳光线方向的面积修正因子;HS为太阳辐照度;HR为从地球上反射来的太阳辐照度(即所谓返照率通量,一般被认为是0.3Hs);E为地球红外辐照度(约为240W/m2);σ为玻尔兹曼常数。
由式(3)、式(4)可知,真实目标与气球诱饵存在温度时序变化,Cp是影响二者温度变化速率差异的主要因素。由于真实目标的组织和结构的复杂性使得其热容较诱饵大得多,因此目标的温度变化率(dT/dt)t小于诱饵(dT/dt)d。可以提取能够表征温度变化率dT/dt的特征量,作为二者的聚类识别判据。
4 时序光谱角识别算法
4.1 传感器光谱辐射功率模型
当红外目标与传感器系统相距很远,其张角小于系统的瞬时视场时,可视其为点目标。在光学系统焦平面上,目标瞬时视场多光谱时序辐射功率表示为 P(ti)=|pλ1(ti),pλ2(ti),…,pλn(ti)],pλj(ti)表示ti时刻被测量目标在 λj(j=1,2,…,n)波段产生的光谱辐射功率,表示为:

式中:A0=πD20/4为光学系统入瞳面积;D0为光学系统口径;τ0(λj)表示光学系统在λj波段的透过率,是波段λj的函数;A(ti)表示ti时刻被测量目标在观察视轴方向的投影面积;R(ti)表示ti时刻被测量目标的等效辐射面积,二者与时间相关;ε(λj)表示被测量目标在λj波段的发射率,是波段λj的函数,假设ε(λj)在工作光谱范围内为常数ε0;L(λj,Ti)为被测量目标光谱辐亮度,是波段λj和温度Ti的函数。
分析式(5)可知,在波段λj内,fi项是时间的函数,称为测量功率时变耦合因素。g(λj,Ti)项是被测量目标单位面积在波段λj向单位立体角内发射的功率,是温度Ti的函数,称为测量功率温变本质因素;τ0(λj)在波段λj内可认为是常数项。
4.2 时序光谱角识别原理
光谱角方法[10-11]的基本理论是以计算图像像元光谱与参考光谱之间的夹角来区分目标类别,是一种匹配识别方法。光谱角度越小,被估计像元的光谱曲线与参考光谱曲线就越相似,归类的概率和精度就越高。
在n维空间上,光谱角的数学表达式为:式中:α为图像像元光谱与参考光谱之间的夹角(光谱角),代表了光谱曲线之间大部分的光谱相似性,其变化范围是[0,π/2],α的值越接近零,表示与参考光谱越相似;X为图像像元光谱强度矢量,Y为参考光谱强度矢量,X·Y为向量点乘操作,‖·‖为求模操作。

图1 时序光谱矢量与光谱角Fig.1 Sequential spectral vectors and spectral angles
如果在光谱的基础上引入第三维时序信息,构造时序光谱角,可以将光谱角的基本光谱匹配识别演化为异常光谱识别。如图1所示,被测量目标时刻ti与ti+k的时序光谱角可以表示为:

式(5)中的时变耦合因素fi在光谱空间反映了该时刻光谱向量的模,而式(7)对两个时刻的光谱向量进行了归一化处理,反映的是两个时刻的光谱向量方向之间的夹角,消除了测量功率时变耦合因素fi的影响,真实反映了两个时刻的温变本质因素g(λj,Ti),即反映了光谱曲线形状的变化,反演了物体温度的变化特性dT/dt。
对于温度时变缓慢的目标,ti与ti+k两时刻的光谱曲线基本没有变化,光谱角αi≈0;而对于温度时变显著的诱饵,两时刻的光谱曲线存在较大变化,光谱角αi>ξ(ξ为选择的光谱角阈值)。参数k是为了增大目标与诱饵的光谱角可分离性选择的隔帧数目,k与ζ由试验确定。
5 仿真试验
计算使用的空间目标和诱饵的参数如表1所示。几种材料的可见光吸收率αv、红外发射率εIR如表2所示。依据表1、表2中数据,由式(3)、(4)计算得到的目标和应用不同材料涂漆气球诱饵的温度变化曲线如图2所示。

表1 空间目标和诱饵参数Tab.1 Parameters of space target and decoy
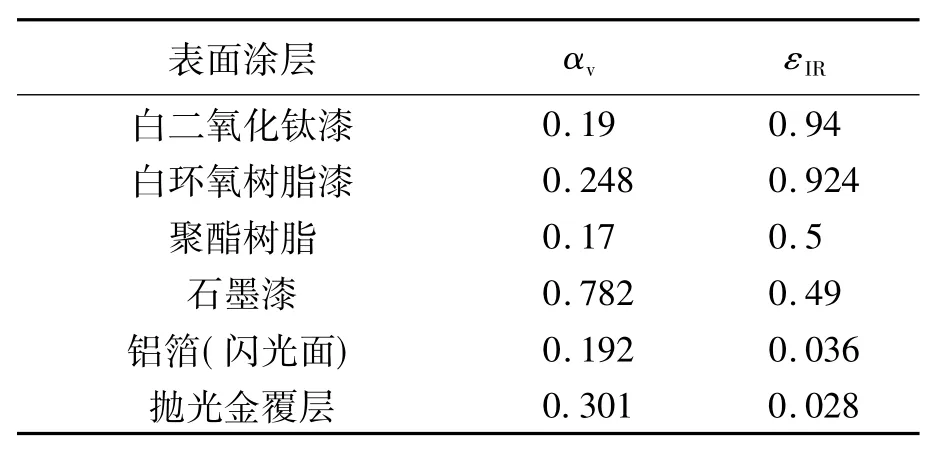
表2 几种材料的可见光吸收率和红外发射率Tab.2 Visible absorptivities and infrared emissivitie of materials

图2 目标和诱饵温度变化曲线Fig.2 Temperature changing curves of targets and decoys
仿真参数如下:
(1)成像系统:像元尺寸a=30 μm;系统焦距f=150 mm;
(2)空域高度:120 km;
(3)识别时间:Δt=2 s;
(4)采样帧频:50 Hz;
(5)波段数:4;
(6) 带宽:0.3 μm;
(7) 中心波长:8.6,9.2,9.8,11.2 μm;
以计算得到的目标和诱饵1 s钟内温度变化曲线为基本数据,初始温度300 K定为基准时刻,每间隔10帧计算采集到目标所在视场内各波段的辐射功率,该时刻称为识别采样时刻,由式(7)计算识别采样时刻与前一时刻间的光谱角。设光谱角阈值ξ=0.075°,将识别时间内计算得到的所有光谱角与阈值比较,光谱角变化值α<ξ为目标,α>ξ为诱饵。仿真结果如图3所示,可见该方法充分融合了多光谱特性,对于空间温度时变缓慢的目标与温度时变显著的诱饵正确识别率较高。

图3 目标蒙皮与诱饵的时序光谱角值曲线Fig.3 Changing curves of sequential spectral angles of target coatings and decoys
为了提高时序光谱角对目标和诱饵的分类效率,实际识别过程中可以计算识别采样时刻与固定基准时刻的光谱角值。对于诱饵,随着时间的积累可以放大时序光谱角,而对于目标,时序光谱角值基本不变,接近零值。根据这种思路计算得到的目标和诱饵的时序光谱角变化曲线如图4所示,可以看出,不同涂漆气球诱饵的光谱角值与采样时刻之间呈单调递增关系,而目标光谱角值具有零不变特性。在多个识别采样时刻过后,诱饵时序光谱角得到一定放大,可以利用阈值分类识别。

图4 目标蒙皮与诱饵与基准时刻相比的光谱角值曲线Fig.4 Changing curves of the spectral angles of target coatings and decoys relative to the reference time
6 结论
本文在分析得出空间目标与气球诱饵在温度时变特性上存在差异的基础上,提出了将时序光谱角作为温度时变速率的判别量度。时序光谱角消除了传感器与目标距离以及等效投影面积在测量功率中时变的耦合影响,通过传感器光谱功率输出值单一反映目标测量功率温变本质,进而实现了目标与诱饵的聚类识别。
本文对识别判据进行了初步研究,在算法性能分析和算法工程实现上还有待进一步探讨:
(1)算法没有考虑系统噪声以及波段数、波段宽度对识别效率的影响,需要建立性能模型加以完善。
(2)该算法的实现必须要利用同时刻同视场多光谱成像系统获取图像信号,因此,研制轻小型同时刻同视场多光谱成像系统也是未来工作的重点和难点。
[1]张聪,张天序.运动目标检测与识别方法研究[J].红外与激光工程,2004,33(2):164-168.ZHANG C,ZHANG T X.Research on detection and recognition method of moving targets[J].Infrared and Laser Engineering,2004,33(2):164-168.(in Chinese)
[2]彭嘉雄,周文琳.红外背景抑制与小目标分割检测[J].电子学报,1999,27(12):47-51.PENG J X,ZHOU W L.Infrared background suppression for segmenting and detecting small target[J].Acta ElectronicaSinica,1999,27(12):47-51.(in Chinese)
[3]郑文龙,张涌,汤心溢,等.复杂背景下红外小目标实时识别方法研究[J].红外与毫米波学报,2001,20(6):433-436.ZHENG W L,ZHANG Y,TANG X Y,et al..Real-time recognition of infrared small targets in complicated IR background[J].J.Infrared Millimeter and Waves,2001,20(6):433-436.(in Chinese)
[4]武春风,张伟,李洁,等.基于时空信息的红外成像系统在探测识别目标时所面临的问题及分析[J].光学技术,2005,31(2):231-234.WU CH F,ZHANG W,LI J,et al..Problems and its analysis of infrared imaging detection and identification facing[J].Opt.Technique,2005,31(2):231-234.(in Chinese)
[5]操乐林,武春风,侯晴宇,等.基于光谱成像的目标识别技术综述[J].光学技术,2010,36(1):145-150.CAO L L,WU CH F,HOU Q Y,et al..Survey of target recognition technology based on spectrum imaging[J].Opt.Technique,2010,36(1):145-150.(in Chinese)
[6]武春风,张伟,丛明煜,等.基于红外多光谱图像相关性的自动目标识别算法[J].红外与毫米波学报,2003,22(4):265-268.WU CH F,ZHANG W,CONG M Y,et al..An automatic target recognition algorithm based on correlation of infrared multispectral imagery[J].J.Infrared Millimeter and Waves,2003,22(4):265-268.(in Chinese)
[7]冯志庆,杨英慧,郭景富,等.基于神经网络的点目标多光谱信息融合识别方法[J].光学 精密工程,2003,11(4):412-415.FENG ZH Q,YANG Y H,GUO J F,et al..Fusion recognition of dot target multi-spectrum data based on ANN[J].Opt.Precision Eng.,2003,11(4):412-415.(in Chinese)
[8]BORIS M,ALEXANDER D.Development of decoy projectiles[EB/OL].(1997-05-06)[2011-07-11].http://www.milparade.com/1997/19/82-83.htm.
[9]TOFANI A.Computer modeling of infrared head-on emission from missile noses[J].Opt.Engineering,1990,29(2):87-96.
[10]DENNISON P E,HALLIGAN K Q,ROBERTS D A.A comparison of error metrics and constraints for multiple endmember spectral mixture analysis and spectral angle mapper[J].Remote Sens.Environ.,2004,93(3):359-367.
[11]SOUTH S,QI J G,LUSCH D P.Optimal classification methods for mapping agricultural tillage practices[J].Remote Sens.Environ.,2004,91(1):90-97.
