移动式机器人复合电源能量管理策略
2012-11-05吕应明袁海文
吕应明 袁海文 崔 勇
(北京航空航天大学 自动化科学与电气工程学院,北京100191)
受体积、重量、输出特性等因素的限制,常用的单一电源很难满足其负载运行过程中对能量和峰值功率的双重要求,因此复合电源受到了广泛地研究[1-3].超级电容器具有功率密度大、循环寿命长、充放电速度快等优点,常被用作复合电源中的辅助储能装置[4].采用蓄电池-超级电容器复合电源代替传统的单一蓄电池电源,可在不增加移动式机器人自身重量的情况下提高机器人的动力性能,并延长电源使用寿命,但必需配以有效的能量管理策略才能发挥出复合电源的优势.复合电源常用的能量管理策略主要有简单规则法[5]、滤波器法[3,6]、模糊控制法[7-8]、最优化法[9-10]等.简单规则法实现简单,但规则固定,只能实现几个有限模式的切换控制,鲁棒性差;滤波器法就是把负载功率需求中的高频脉动成分通过低通(或高通)滤波器分离出来由超级电容器承担,但不能实现较大时间尺度上功率的合理分配;模糊控制法可实现功率在蓄电池和超级电容器之间的实时分配,但蓄电池仍会承担较多的高频脉动电流,这对蓄电池的使用寿命不利;基于最优化的能量管理策略算法复杂,不易在线实现,通常仅用于仿真研究.移动式机器人驱动电流具有大小变化不定且常伴有高频脉动的特点,采用任一种常用的能量管理方法都难以在较大和较小时间尺度上都取得良好效果.因此,本文研究了一种模糊控制与数字滤波相结合的能量管理策略,通过模型仿真和样机实验验证了能量管理策略的有效性.
1 蓄电池-超级电容器复合电源结构
移动式机器人蓄电池-超级电容器复合电源的拓扑结构如图1.蓄电池为主电源,超级电容器为辅助电源.机器人负载消耗的大部分能量来自蓄电池,为了减小能量经过功率变换器时的损耗,将蓄电池与负载相连,超级电容器通过一个双向DC/DC变换器(图中Bi-DC/DC)与负载相连.本文规定,IBi>0时Bi-DC/DC处于正向工作状态.
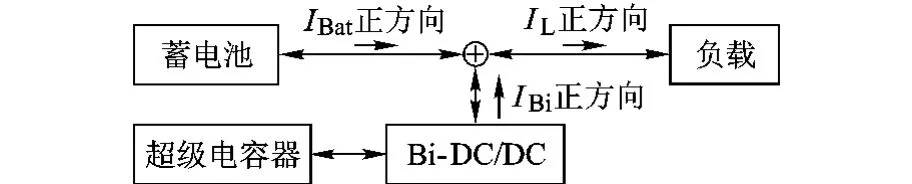
图1 蓄电池-超级电容器复合电源结构
根据基尔霍夫电流定律,有

对于改进后的蓄电池,其能承受的最大充放电电流有限,过电流放电或充电对蓄电池使用寿命会造成严重损害.为了保护蓄电池,必需对Ibat进行限制,即IBat应满足:

式中,IBatn和IBatp为蓄电池最大允许充电和放电电流.由式(1)和式(2)可得

由式(3)可知,对于一定的负载电流IL,通过控制Bi-DC/DC的输出电流IBi在一定范围内即可达到间接控制IBat的目的.
2 复合电源能量管理策略
移动式机器人在运动的同时通常还需要执行一定的动作,IL除了随其运动状态的改变发生波动外,还有较高频率的脉动电流.针对此特点,复合电源的能量管理策略应具有以下功能:当IL过大时,控制超级电容器适度分担峰值负载电流,把IBat限制在合理范围内;当IL出现高频波动时,控制IBi跟踪IL的高频脉动部分,IBat则仅为IL的低频慢变部分,使IBat得到平滑;由于超级电容器持续输出(或吸收)功率的能力有限,须控制超级电容器电压保持在适当范围内,使其一直具有最佳的充放电能力.
2.1 复合电源能量管理系统结构
图2为复合电源能量管理系统原理图.系统中Bi-DC/DC的主电路采用boost/buck半桥结构,其低压侧接超级电容器,高压侧为直流母线,其工作于boost升压模式时,超级电容器放电,工作于buck降压模式时,超级电容器被充电.对Bi-DC/DC的控制采用常用的PI(Proportion Integration)调节器,构成电流和电压双环控制结构,见图2中两个虚线框内的部分.脉冲宽度调制(PWM,Pulse Width Modulation)的作用是将PI调节器输出的占空比信息变换成驱动电路的脉冲信号.
为了保证Bi-DC/DC输出电流对给定值的良好跟踪特性,电流控制环采用平均电流控制模式.超级电容器电压经低通滤波后与参考电压VSC_r比较,由电压环PI调节器输出维持超级电容器电压需要的电流参考值,叠加到Bi-DC/DC输出电流给定值IBi_r上,最终通过电流环的控制来维持超级电容器电压.为了使电流环与电压环协调工作,设计电压环的调节速度比电流环慢很多,使电流环的优先级要高于电压环[11].IL变化剧烈时,电压环的反应较慢,调节作用微弱,能量管理策略优先满足IL调节的需要;IL较小且平稳时,电流环的作用微弱,电压环起主要作用,控制超级电容器的电压维持在给定值VSC_r左右.

图2 能量管理系统原理框图
2.2 电流给定计算方法
本文能量管理策略的核心是电流控制环给定值IBi_r的计算,计算方法原理如图3.根据IL和VSC的变化,由图中虚线框内的模糊控制+逻辑门限算法对IL进行预分配.定义K(0≤K≤1)为Bi-DC/DC的期望输出电流分配因子,即模糊控制+逻辑门限算法的输出值.K的物理意义为,Bi-DC/DC的期望输出电流在总的IL中所占的比例.FLC1,FLC2(FLC,Fuzzy Logic Controller)是两个模糊控制器,K1,K2分别为二者的输出.
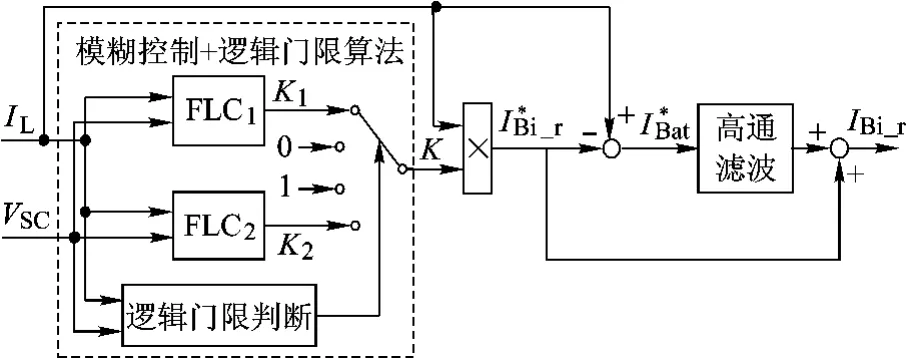
图3 电流给定计算方法原理

则蓄电池的期望输出电流I*Bat可表示为


2.3 模糊控制+逻辑门限算法设计
复合电源相对负载的工作状态只有两种:放电和充电.两种工作状态下能量管理的目标不同,即IL在蓄电池和超级电容器间的分配策略不同,需要分别设计模糊控制器.图3中,IL≥0时,采用FLC1;IL<0时,采用FLC2.模糊控制器的两个输入IL和VSC的变化范围都是可预先测定的,为设计方便,对二者进行了归一化处理.定义模糊控制器各输入/输出的论域均为{S,M,B},其中,S表示小;M表示适中;B表示大.图4给出了各输入/输出对应的隶属度函数.表1和表2给出了FLC1和FLC2的模糊规则.

图4 模糊控制器输入/输出隶属度函数

表1 FLC1模糊规则表
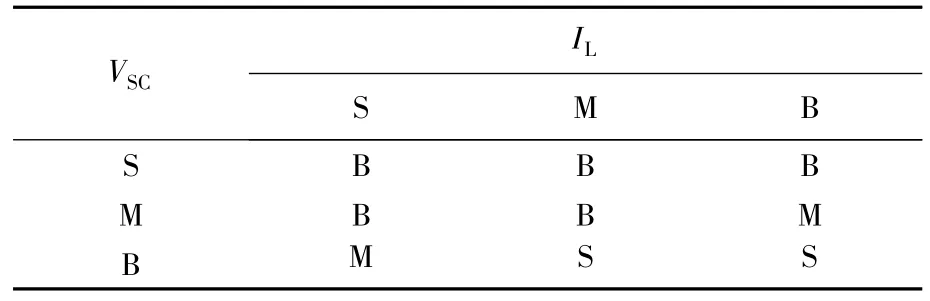
表2 FLC2模糊规则表
制定两模糊控制器模糊规则的依据如下:
1)复合电源放电状态(对应FLC1)IL较小时,为了避免电流经过功率变换器时的功率损耗,IL应全部由蓄电池提供;IL较大时,为了避免蓄电池过电流放电,应根据超级电容器电压的高低确定由其提供峰值电流的大小,余下的基本电流由蓄电池提供.
2)复合电源充电状态(对应FLC2)负载回馈电流较小时,考虑蓄电池充放电循环寿命的限制,在保证超级电容器电压不过高的前提下,优先考虑对超级电容器充电;负载回馈电流较大时,若超级电容器的电压高,则对其少充电或不充电,电压低则多充电.
由于模糊控制器自身的模糊性,若采用单纯的模糊控制器对IL预分配,则会造成对小电流分配的不合理.负载消耗电流很小时,仅由蓄电池供电即可,但单纯的模糊控制器仍会给超级电容器分配很小的电流,造成电能经过DC/DC变换器时不必要的损耗.负载回馈的电流较小时,本来可由超级电容器完全吸收的电流不能被完全分配给超级电容器,对蓄电池的微小充电电流对其使用寿命不利.在超级电容器电压过低或过高时分配给其的微小放电或充电电流也会造成对超级电容器的损害.因此,对模糊控制器的输入IL和VSC均设计了逻辑门限值,设计方法见图5,IL_th+和IL_th-分别是负载正向和反向电流的逻辑门限值,VSC_max和VSC_min分别是超级电容器最大和最小允许工作电压,且留有一定的裕量.当 IL≥0时,若 VSC≤VSC_min或 IL<IL_th+,不采用 FLC1,直接取 K=0,其它情况下采用 FLC1,即取 K=K1;当 IL<0时,若VSC≥VSC_max,不采用 FLC2,直接取 K=0,若 VSC<VSC_max但 IL>IL_th-,也不采用 FLC2,直接取 K=1,其它情况下采用FLC2,即取K=K2.

图5 逻辑门限设计示意图
2.4 能量管理策略仿真
在Matlab 7.1环境下建立了移动机器人复合电源系统仿真模型.蓄电池直接采用Matlab中的Li-ion电池模型,额定电压14.4 V,容量1.5 A·h,内阻0.144 Ω,初始荷电状态0.9;超级电容器采用电容和电阻串联模型,容量5 F,初始电压10 V,串联电阻0.1Ω.高通滤波器设计为5阶butterworth型数字滤波器,截止频率为15 Hz.超级电容器电压测量通道中的低通滤波器采用截止频率为1.6 kHz的RC低通滤波电路模型.模糊控制器输入逻辑门限值 IL_th+,IL_th-,VSC_max,VSC_min分别取2 A,-1.5 A,12 V,6 V.
仿真实验将移动机器人的启动、减速、加速、回馈制动等典型工作过程集中在了30 s时间内,具有很强的代表性,图6中给出了IL变化曲线.对采用单一滤波算法、单一模糊控制算法、模糊控制+滤波算法的能量管理策略均进行了仿真,图6中给出了复合电源中IBat和超级电容器IBi的曲线.由图可知,单一滤波算法不能使超级电容器提供足够的负载峰值电流补充,蓄电池输出峰值电流过大.改变滤波器的截止频率可提高超级电容器的输出峰值电流,但会使IBat严重滞后于IL的变化.采用单一模糊控制算法时,虽然超级电容器能够适度分担负载峰值电流,但IBat的高频脉动现象严重,对蓄电池的使用寿命不利.采用模糊控制+滤波算法时,模糊控制算法先对IL进行了预分配,使超级电容器提供了合适的峰值电流,同时滤波算法分解出了IL中的高频成分给超级电容器,既使IBat得到了平滑,又没有明显滞后于IL.可见,模糊控制与数字滤波相结合的能量管理策略在较大和较小时间尺度上均能实现对IL的合理分配.

图6 仿真模型电流曲线
3 样机实验验证
根据图2的系统原理,设计了移动式机器人复合电源系统样机,见图7.复合电源中的蓄电池选用额定电压14.4 V、容量1.5 A·h的锂电池.超级电容器采用6个额定电压2.7V、容量30F的单体电容串联模组.Bi-DC/DC变换器的两个MOS管采用单独PWM信号驱动控制方式,储能电感的感量为0.1 mH.主控制器采用DSP(Digital Signal Processor)芯片TMS320F2812,能量管理策略由DSP的软件实现,包括模糊控制器算法、数字滤波算法、PI调节器算法、PWM输出信号产生算法等.两个MOS管驱动电路采用半桥驱动芯片IR2110,PWM驱动信号的频率为50 kHz.电流IBi和IL的测量选用电流传感器芯片ACS712,其可测量双向电流,输出的电压信号经调理后输入DSP的模拟输入通道进行AD转换.超级电容器电压的测量采用电阻分压方式实现,经电压跟随和低通滤波电路后输入DSP.

图7 复合电源移动式机器人原理样机
电机启动电流通常比正常工作电流高很多.图8给出了机器人启动过程中复合电源系统电流的实验结果,由图可知,机器人启动瞬间IL峰值达近3A,超级电容器通过Bi-DC/DC变换器及时提供了峰值电流补充,蓄电池输出的最大电流被限制在了1.4A左右.IL低于1A时,Bi-DC/DC变换器关闭,IL全部由蓄电池提供.移动机器人加速-减速过程的实验结果见图9,IL大于1 A时,能量管理策略中的模糊控制算法起作用,超级电容器向负载提供了一部分电流;IL突变时,滤波算法起作用,突变电流的高频成分被分配给了超级电容器,IBat上升和下降的跃变过程均得到了平滑,使蓄电池得到了保护.

图8 机器人启动过程实验结果

图9 机器人加速-减速过程实验结果
4 结论
针对移动式机器人蓄电池-超级电容器复合电源提出了模糊控制与滤波算法相结合的能量管理策略.带逻辑门限的模糊控制算法可实现负载电流在较大时间尺度上的分配,使超级电容器提供或吸收必要的峰值电流,避免蓄电池的充放电电流过大;滤波算法可在较小时间尺度上分解出负载电流中的高频脉动成分给超级电容器承担,使蓄电池的输入/输出电流得到平滑.
References)
[1]张国驹,唐西胜,齐智平.超级电容器与蓄电池混合储能系统在微网中的应用[J].电力系统自动化,2010,34(12):85-89 Zhang Guoju,Tang Xisheng,Qi Zhiping.Application of hybrid energy storage system of super-capacitors and batteries in a microgrid [J].Automation of Electric Power Systems,2010,34(12):85-89(in Chinese)
[2] Baisden A C,Emadi A.ADVISOR-based model of a battery and an ultra-capacitor energy source for hybrid electric vehicles[J].IEEE Transactions on Vehicular Technology,2004,53(1):199-205
[3] Liu Guidong,Zhang Junzhi,Sun Yuwei.High frequency decoupling strategy for the PEM fuel cell hybrid system[J].Int J Hydrogen Energy,2008,33(21):6253-6261
[4] Rufer A,Hotellier D,Barrade P.A supercapacitor-based energy storage substation for voltage compensation in weak transportation networks[J].IEEE Transactions on Power Delivery,2004,19(2):629-636
[5] Schupbach R M,Balda J C,Zolot M,et al.Design methodology of a combined battery-ultracapacitor energy storage unit for vehicle power management[C]//IEEE 34th Annual Power Electronics Specialist Conference.Acapulco,Mexico:[s.n.]2003,1:88-93
[6] Zolot M.Dual-source energy storage-control and performance advantages in advanced vehicles[C/CD]//Proc Electric Vehicle Symposium(EVS-20).Long Beach,California,USA:[s.n.]2003
[7] Eren Y,Erdinc O,Gorgun H,et al.A fuzzy logic based supervisory controller for an FC/UC hybrid vehicular power system[J].Int J Hydrogen Energy,2009,34(20):8681-8694
[8] Cauxa S,Hankachea W,Fadela M,et al.On-line fuzzy energy management for hybrid fuel cell systems[J].Int J Hydrogen Energy,2010,35(5):2134-2143
[9] Xu Liangfei,Li Jianqiu,Hua Jianfeng,et al.Optimal vehicle control strategy of a fuel cell/battery hybrid city bus[J].Int J Hydrogen Energy,2009,34(17):7323-7333
[10] Kermani S,Trigui R,Delprat S,et al.PHIL implementation of energy management optimization for a parallel HEV on a predefined route [J].IEEE Transactions on Vehicular Technology,2011,60(3):782-792
[11]朱选才,徐德鸿,吴屏,等.燃料电池发电装置能量管理控制系统设计[J].中国电机工程学报,2008,28(11):101-106 Zhu Xuancai,Xu Dehong,Wu Ping,et al.Design of energy management control in fuel cell power system[J].Proceedings of the CSEE,2008,28(11):101-106(in Chinese)
