第二代完整稳性衡准的验证与改进研究
2012-10-30朱永峨周耀华
李 晓,朱永峨,周耀华
(中国船级社上海规范研究所,上海 200135)
0 引 言
国际海事组织(IMO)正在研究制定第二代完整稳性衡准,主要采用多层评估方法,以建立计及主要动力稳性失效模式的船舶设计最低标准,并可适用于非常规类型的船舶。随着时间的推移,其将作为2008国际完整稳性规则(2008 IS CODE)A部分强制性要求的补充和替代方法。
第二代完整稳性衡准主要包括采用建立在几何/水动力数值、装载工况和基本营运参数等基础上的简单公式进行评估的第一层薄弱性衡准,采用简化物理计算进行评估的相对较为复杂的第二层薄弱性衡准,以及采用时域数值模拟和概率理论进行的最为复杂的稳性直接评估。目前确定的动稳性失效模式有5种:参数横摇、纯稳性丧失、瘫船状态、横甩和过度加速度[1]。
IMO稳性、载重线和渔船安全分委会(SLF)完整稳性(IS)工作组认为,第一层薄弱性衡准对新的第二代完整稳性规则是非常重要的,因为,这是船舶设计者和船长对稳性各种失效模式进行了解并作出判断的简单易行的方法和途经。
本文根据SLF 53/INF.10 ANNEX2[2]提出的参数横摇和纯稳性丧失的第一层薄弱性衡准建议方案,对我国有代表性的实船进行验证,并就建议方案的适用性和合理性,提出必要的改进意见和建议。
1 参数横摇和纯稳性丧失的第一层薄弱性衡准建议方案
1.1 参数横摇的第一层薄弱性衡准
如图1所示,参数横摇最可能在纵向波浪(迎浪/随浪)中出现。这是因为船舶在纵向波浪中沿船长水线面随时间变化引起复原力臂相应变化,从而导致在某些情况下会发生参数横摇。

图1 船舶在波浪中沿船长的水线面变化示意图
综上所述,可简化出以GM(初稳性高度)变化为要素,作为参数横摇的第一层薄弱性衡准。SLF 53/INF.10 ANNEX2建议的参数横摇第一层薄弱性衡准具有一定的典型性:

式中:UI和LI——分别为最高吃水和最低吃水的惯性矩;
V——船舶额定吃水的排水体积,取最高吃水为干舷甲板以下5%干舷;最低吃水为平均吃水的一半或船中干舷甲板下舭圆和侧壁的交点。
如果GM变化幅值满足上述关系式,则可能发生参数横摇。需注意,该衡准不指定波高,而是假设波浪中GM变化最不利的相对波高。
1.2 纯稳性丧失的第一层薄弱性衡准
纯稳性丧失是由于单个入射波导致瞬时水线面面积变化引起,特别是船被艉斜浪的波峰缓慢通过时,复原力臂将相对静止水面大幅减小。如果此时存在风/浪外部扰动力,将导致船舶有较大的横摇,当船舶航速略低于所骑波浪的临界速度时,船舶中心位于波峰的时间将会很长,纯稳性丧失的风险极大。
综上所述,可简化出相应于最小水线面的初稳性高度 GMmin为要素,作为纯稳性丧失的第一层薄弱性衡准。SLF 53/INF.10 ANNEX2建议的纯稳性丧失第一层薄弱性衡准具有一定的典型性:

式中:KB、KG——分别为浮心高度和重心高度。
如果 GMmin为负值,则船舶存在纯稳性丧失的危险。
2 实船计算及评估
分别选取集装箱船、客滚船、油船和散货船各5艘进行参数横摇和纯稳性丧失第一层薄弱性衡准的实船验证和分析。
2.1 实船主要参数
20艘实船的主要参数见表1。
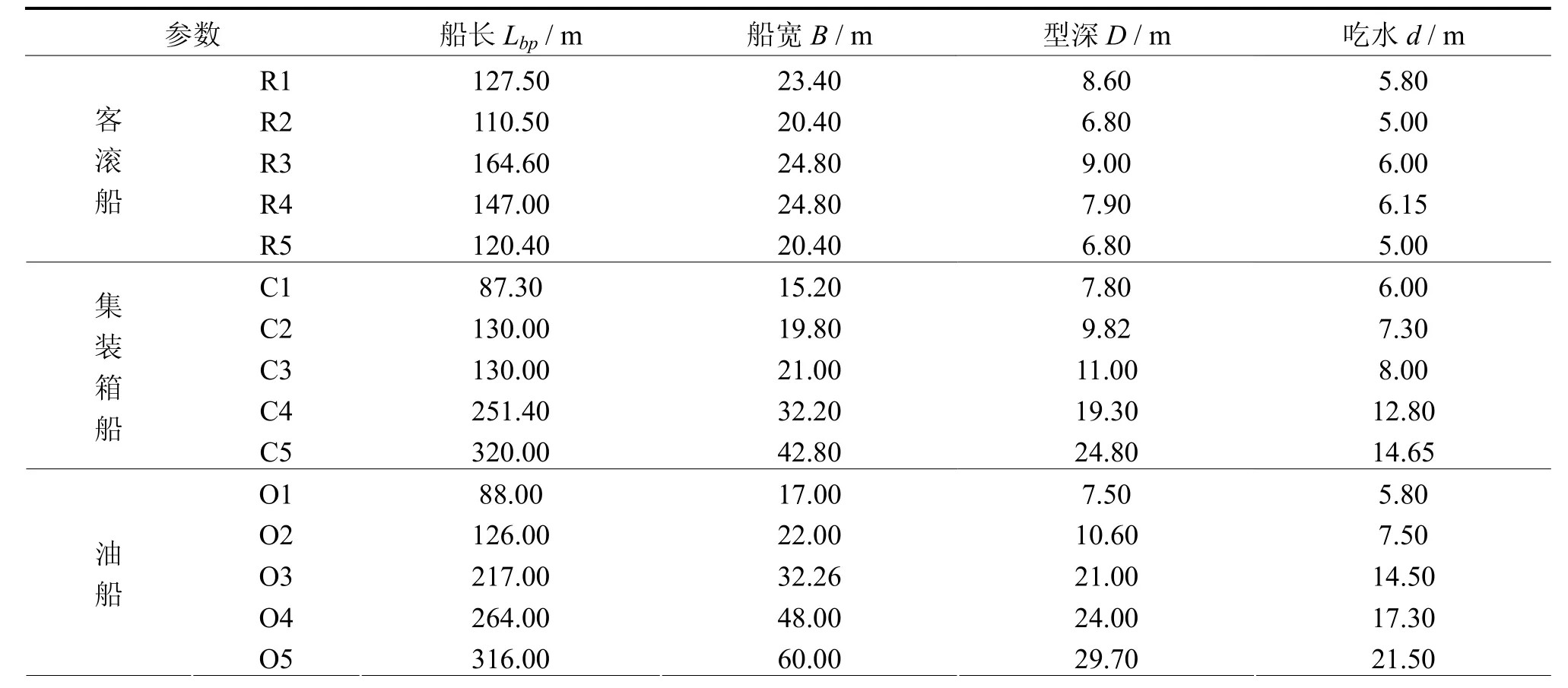
表1 主要参数

续表1
2.2 第一层薄弱性衡准
20艘实船的参数横摇和纯稳性丧失第一层薄弱性衡准计算结果如表2所示。

表2 实船计算结果
2.3 分析
2.3.1 实船验证
1) 客滚船:参数横摇,5艘实船均存在发生参数横摇的可能性,衡准较严格;纯稳性丧失,5艘实船中2艘船有可能发生,衡准相对合理。
2) 集装箱船:参数横摇,3艘尺度较小的实船计算值与衡准值(0.51)相差较小,2艘主尺度较大的实船计算值与衡准值相差巨大。5艘船中3艘实船有参数横摇的可能,其中主尺度较大的2艘船的参数横摇风险更大。衡准较为严格;纯稳性丧失,5艘实船中4艘船是安全的,1艘尺度较大的船发生纯稳性丧失的风险很大,衡准合理性相对好于参数横摇;注意到集装箱船的装载情况众多,且差异性很大,要求所有装载情况均满足参数横摇和纯稳性丧失衡准的条件,很困难。
3) 油船:参数横摇,5艘实船均满足衡准要求;纯稳性丧失,5艘实船均满足衡准要求。
4) 散货船:参数横摇,5艘实船均满足衡准要求;纯稳性丧失,5艘实船均满足衡准要求。
2.3.2 两种失效模式的第一层衡准评估
综合实船计算分析可以看出,滚装船和集装箱船发生参数横摇和纯稳性丧失的可能性较大,而油船和散货船几乎不发生参数横摇和纯稳性丧失。总的来说,纯稳性丧失第一层衡准相对比较合理,而参数横摇第一层衡准则要求过于严格。
2.3.3 两种失效模式第一层衡准计算方法分析
SLF 53/INF.10 ANNEX2建议的两种失效模式的第一层衡准,选取计算 ΔGM/GM和GMmin的水线惯性矩分别是最高和最低吃水下的 IU和 IL,该两个吃水差值(dU-dL)反映了所考虑的波高。对计算的5艘集装箱船分别为:4.71m、6.04m、6.85m、12.58m和16.97m。
从集装箱船在海上可能遭遇的波浪而言,上述波高可能过于保守,特别是对大型和超大型船舶。从现代集装箱船所具备接收气象和海况预报的能力看,完全可以规避危险的巨浪。
因此,选取吃水差值(dU-dL)为0.17λ3/4(反映波高与波长的统计关系式),计算时取波长等于船长,如吃水差值(dU-dL)大于8.5m,取8.5m,该波高数值相当于北大西洋海况的有义波高[3]。
按此计算得到5艘集装箱船的吃水差值(dU-dL)分别为:4.86m、6.54m、6.54m、8.50m和8.50m,该数值对大型和超大型集装箱船有一定的减小。两种失效模式的第一层衡准结果见表3。

表3 根据建议波高计算的集装箱船的结果
由此看出,C3变为接近不可能发生参数横摇,反映出改进合理。但是,上述改进建议对大型和超大型集装箱船C4和C5仍然未改变衡准结果,这表明,SLF 53/INF.10 ANNEX2建议的参数横摇第一层薄弱性衡准存在根本性不足,有必要进一步修改。
2.3.4 参数横摇与“过度加速度”协调
值得注意的是,为避免参数横摇,则要求增大初稳性高度GM。但是,IMO 2008 IS规则指出,过高的初稳性高度值会“不利于船舶及其装置、设备和所运货物的加速度力”,因此,参数横摇与“过度加速度”是相互矛盾的两个稳性失效模式。协调好这两种稳性失效模式的衡准是第二代稳性规则制定时所必须考虑的因素。
3 结 语
对第二代完整稳性衡准的第一层薄弱性衡准的SLF 53/INF.10 ANNEX2方案进行了实船计算,初步筛选结果显示,大部分客滚船和集装箱船存在参数横摇和纯稳性丧失的薄弱性,这与船舶营运需长期保持良好安全的情况不符。
对大型集装箱船,如采用建议的吃水差值(dU-dL),衡准结果的合理性将得到一定的改善,特别是纯稳性丧失的第一层衡准变得更为合理。同时,也发现SLF 53/INF.10 ANNEX2建议的参数横摇第一层薄弱性衡准仍存在根本性不足,有必要进一步修改。
此外,对于大型和超大型集装箱船,是否要采用与小型船舶相同的参数横摇和纯稳性丧失薄弱性衡准也值得商榷。
参数横摇与“过度加速度”是相互矛盾的两个稳性失效模式。协调好这两种稳性失效模式的衡准是第二代稳性规则的制定时所必须考虑的因素。
[1] IMO, SLF53/3/1. Report of the Correspondence Group on Intact Stability[S]. 2010.
[2] IMO, SLF53/INF.10. Information Collected by the Correspondence Group on Intact Stability [S]. 2010.
[3] IMO, MSC/Circ.608/Rev.1. Interim Guidelines for Open-Top Containerships [S]. 1994.
