基于磁阻式步进电机的恒定制动转矩负载
2012-10-26齐立群张广玉董惠娟武剑
齐立群,张广玉,董惠娟,武剑
(1.哈尔滨工业大学机电工程学院,黑龙江哈尔滨150001;2.珠江水利委员会珠江水利科学研究院,广东 广州510610)
齿轮是人造卫星和飞船中大量使用的活动机械构件.这类空间齿轮系统一般输出转速较低(≤100 r/min),负荷转矩范围约为0~10 N·m,由于啮合部位摩擦生热严重,且空间中无对流散热条件,因此齿轮容易发生粘着磨损和冷焊问题[1],寿命大为缩短.目前国内外已有许多科研机构研制了专门用于研究该问题的真空摩擦试验机[2-3].这类试验机的共同特点是能够在真空环境及低速条件下提供平稳、可调制动转矩,其通常由制动器实现.
目前常用的制动器主要有以下3种:1)摩擦制动器[4];2)磁粉制动器[5-6];3)电机制动器.其中摩擦制动器的基本原理是将2个摩擦盘在一定压力下相接触,在相对运动的作用下产生制动转矩.不足之处是其制动转矩与转速有关,且摩擦生热问题使其只能通过传动轴间接工作于非真空环境,故对真空罐的密封要求十分苛刻.磁粉制动器的基本原理是通过填充于工作空间的磁粉链传递转矩,不管制动盘的转速如何,只要能使通过励磁绕组的电流保持恒定,其产生的制动转矩就保持恒定.不足之处是制动器始终处于滑差状态,滑差转矩和转速所消耗的功率全部转化为热量[7],因此该种制动器也不能直接工作于真空环境中.电机制动器的基本原理是使电机(由于电刷容易出现烧蚀问题,因此多采用无刷电机)工作于发电机状态,通过外接电阻控制绕组电流达到调节制动转矩之目的.这种制动器中,机械能首先转变为电能,由导线引至非真空环境后,再转化为热量,大大提高了可靠性,因此电机制动器是目前空间齿轮寿命实验系统的主要制动负载形式.其不足之处是:1)低速条件下电机的输出电压很低,由于绕组本身有一定的内阻,故即使直接将电机馈电端短路,也可能难以提供足够的制动转矩.加入增速齿轮固然可解决该问题,但增速齿轮亦会磨损.2)电枢电流为交流,因此转矩不平稳,有明显的顿挫感.3)电机内有永磁体,较难实现零制动转矩.也有的寿命实验系统将负载输出轴引至非真空环境,在真空罐外部安装磁粉制动器,但此举导致了真空罐密封成本大幅度增加,对实验设备提出更高的要求.
针对这些问题,提出一种基于磁阻式步进电机[8-10]的恒定制动转矩负载,其基本原理是利用相电流细分技术[11-12],在电机定子磁极上合成出大小恒定而落后转子相位π/2的旋转磁场,使转子在等速旋转状态下保持其最大静态锁定转矩[13],达到使其输出与转速无关的平稳制动转矩之目的.
1 电机制动器存在问题分析
空间齿轮寿命实验系统的结构如图1所示.被测齿轮组以及动力电机和制动电机位于真空罐内,动力电机在调速装置的控制下以恒定转速带动齿轮组旋转.制动电机(采用三相无刷电机)作为负载,在旋转条件下产生的感应电压加在发热电阻R1~R3上,形成相电流,从而产生制动转矩.

图1 空间齿轮寿命实验系统示意Fig.1 Diagram of the space gear life test system
三相无刷直流电机的输出电压可表示为

式中:u(t)、v(t)、w(t)为三相相电压,t为时间,ω 为转子角速度,kr为比例系数.
一般有R1=R2=R3,而由于三相电压对称,故R1~R3公共点A的电位为零,故相电流为

设kT为电机的转矩系数,则电机的制动转矩T(t)为

据式(2)、(3)可分析电机制动的问题:
1)T(t)与ω有关,ω越快,T(t)越大,故一旦重新调节动力电机的转速后,R1~R3必须做出相应的同步调节,比较繁琐.
2)绘制 T(t)及 Iu(t)、Iv(t)、Iw(t)的波形,如图2所示.
从图2可知,由于Iu(t)、Iv(t)、Iw(t)均为交流,故T(t)不平稳,导致被测齿轮载荷不稳定,不利于在寿命实验中获取齿轮转速-转矩-磨损量之间的关系.
3)因绕组内阻缘故,当转子转速较低时相电流小,即使将发热电阻直接短路,仍可能无法提供足够的制动转矩.
4)由于三相无刷直流电机的转子为永磁铁,定子带有铁芯,因此不可能实现零制动力矩.
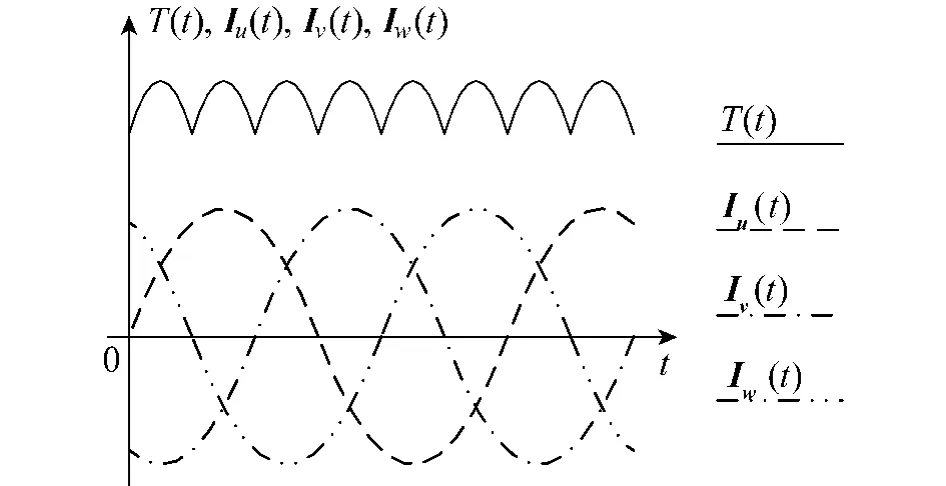
图2 电机制动器的制动转矩Fig.2 Braking torque of themotor brakestaff
2 基于磁阻式步进电机的恒定制动转矩负载原理
在传统的电机制动器中,由于转速决定相电流,导致转速和转矩不能兼顾,故为得到与转速无关的平稳可调制动转矩,必须分别控制转速和电流.而且,为使零电流时达到零转矩,应采用不带有永磁体的电机.据此,采用了三相磁阻式步进电机(亦称反应式步进电机)作为制动电机,在经过细分的三相驱动电流作用下,对外输出与转速无关的平稳制动转矩.由于电流幅值决定转矩,而其频率决定转子转速,使二者得到分别控制,且发热元件是其控制电路中的功率管(安装在非真空环境中),解决了传统电机制动器存在的问题,达到真空齿轮寿命实验系统的要求.
当磁阻式步进电机某一相绕组通入恒定直流,而使转子在某一角度上处于静止状态时,转子的锁定转矩(称静态锁定转矩)T由下式确定:

式中:Zs为定子每极下的小齿数;Zr为转子齿数;l为铁心长度;N为每极控制绕组的匝数;I为绕组电流;λ1为气隙比磁导中 n次谐波的幅值;θe=θ·2π/θst,θe为电角度,rad;θ为机械角位移,rad;θst为电机步距角与对应驱动拍数的乘积,rad.
式(4)中,Zs、Zr、l、N 和 λ1均为与电机结构相关参数,当电机选定时,T仅与I和θe有关.显然,若I为定值,则θe=π/2时,电机产生最大静态锁定转矩 Tmax,且 Tmax∝I2.当 θe=0 时,1 号齿处于平衡位置,转子对外输出的转矩为零.
由上述分析可知,Tmax是定子和转子无相对角位移,且θe=π/2条件下,定子对转子的锁定转矩.由于匀速转动状态等效于静态,故若定子具有某一恒定角速度,那么转子就可以在同一角速度下保持Tmax,从而在旋转条件下产生锁定转矩.显然,使定子本身旋转在很多情况下比较困难,可行的方法是使定子产生恒定角速度的旋转磁场.由于在保持θe=π/2的条件下,改变 I可调节 Tmax,而改变定子磁场旋转速度可调节转速,即达到了转矩和转速分别调节的目的,从而实现与转速无关的可调恒定制动转矩负载.
为提高制动转矩的平稳性,采用细分驱动技术实现旋转磁场.图3所示为基于细分驱动技术的定子磁场角位移示意图,图中转子转速和定子磁场的旋转速度相等且为匀速.为便于说明定子和转子间的相对运动,图中将两者展开成直线.

图3 基于细分驱动技术的定子磁场角位移运动示意Fig.3 Diagram of angular disp lacement of the stator magnetic field based on subdivision driver technology
转子的角位移零点设定为1号齿与定子A相磁极的正对位置(即相差θe=1的平衡位置).如子图3(a)所示,为得到最大制动转矩,1号齿须与A相保持θe=π/2的关系.同时,5号齿与同为A相的A'相也保持π/2相位差.此时,A相电流为I,所产生的静态转矩为Tmax.如子图3(b)所示,经过时间t,1号齿平衡位置在A、B两相之间发生了机械角位移θm(t)=ωt(称相间角位移),对应的电角度为θe(t),此时必须使A相磁极旋转至1号齿的新平衡位置并仍保证θe=π/2,才能使转矩仍然保持为Tmax,故应使A相和B相均通过一定电流,使两者的磁场合成一个磁极V(及V').
V的相电流IV是IA和IB的矢量合成,经推导IA和IB分别为

IA与IB矢量合成后,相当于通过磁极V的相电流仍为I,故Tmax保持不变.当转子继续旋转,1号齿平衡位置运行至B相和C相之间(简称“1号齿位于BC之间”,下同)时,则由B、C两相合成 V(及V');而当1号齿位于CA之间时,则由C、A两相合成V(及V'),实现连续运行,即各相电流按下式取值:

据式(4)可知,为使T=Tmax,必须令θe精确地等于π/2,为此可采用位置和速度传感器,并使位置传感器的安装与转子1号齿对齐.运行时,通过不断检测转速ω,即可计算出当前1号齿的总角位移θ(t).因此,为保持θe=π/2,此时合成磁极V应当出现在角位置θ(t)-θst/4处,由于定子各相的角位置固定,因此可计算出1号齿位于哪两相之间,并得到对应的相间角位移θm=(t),代入式(7),从而计算出各相电流.
由于位置和转速传感器必须在转动条件下才能有输出,使控制系统按照式(7)对制动电机进行驱动,因此要求动力电机的堵转转矩Ts>Tmax(即动力电机不能停转).
以下分析系统的稳定性:
设施加在制动电机转子上的动力转矩为TA,制动电机本身产生的制动转矩为TB,有

式中:J为制动电机转子的转动惯量.
由于动力电机的功率恒定,即ωTA=C(C为恒量),故对某一TB,ω与TA将自动调整,直至TA=TB,并将转速稳定于某一ω.当调节动力电机的驱动电压时,C改变,TA与TB的平衡关系被破坏,从而dω/d t≠0,此时转速传感器将这一变化反映至控制单元,改变制动电机的驱动电流频率,即可逐渐建立新的平衡.而当制动电机的电流幅值改变,即Tmax改变时,仍然会使dω/d t≠0,因此也可重新建立平衡.
3 负载系统构成
根据以上原理,设计了基于三相磁阻式步进电机的真空低速恒定制动转矩负载,其结构如图4所示.
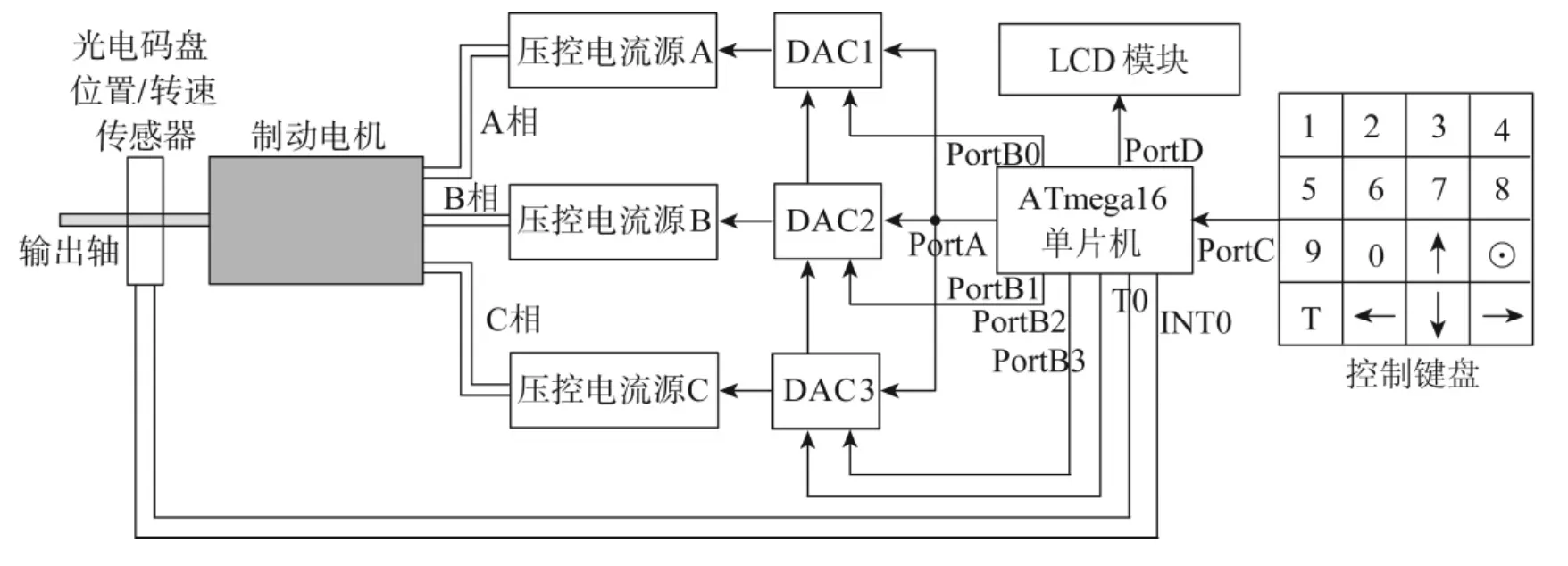
图4 基于三相磁阻式步进电机的真空低速恒定制动转矩负载系统原理图Fig.4 Diagram of the vacuum low-speed constant braking torque load system based on reluctance step motors
从图4可知,整个负载系统以主控单片机AT-mega16为核心,其PortA口扩展了3个8位数模转换器(digital-analog converter,DAC),PortB0 ~PortB2分别为其片选线,3个DAC在PortB3脚的控制下同步更新数据.位置/转速传感器采用光电编码盘式,其中位置信号经INT0口进入单片机,通过中断方式每周为控制程序提供一次转子零位信息,以消除相位累积误差.来自转速传感器的脉冲作为单片机计数器Te的门控信号,通过记录高电平期间内T0的计数值,从而获知当前转速.操作者通过控制键盘(由PortC口扩展)将所需的制动转矩数值输入单片机后,单片机根据当前的转速、角位置计算θm(t),根据式(7)计算出三相绕组所需施加的电流波形数据,通过DAC1~DAC3转换成电压模拟量,再经压控电流源A~C转换成所需电流后馈入对应绕组,产生相应转速的旋转磁场.制动转矩数值和转子转速通过LCD模块显示(经PortD口扩展).
所采用步进的型号为110BC380B,其最大相电流为6 A,最大静态锁定转矩为9.8 N·m,步距角为1.5°,采用32 细分,步距角达0.027°,当转速达到稳定状态时,转矩的波动基本可忽略.采用更高的细分等级可获得更平稳的转矩,但单片机的计算负担更重,应折中考虑.
4 负载系统实验
为对所提出的基于三相磁阻式步进电机的恒定制动转矩负载进行实际测试,以验证上述理论的正确性和可行性,研制了实验系统,图5为该实验系统的原理图.

图5 实验系统原理Fig.5 Digram of the experimental system
在原有空间齿轮寿命实验系统基础上,为验证负载系统制动转矩与转速的无关性,在制动电机与齿轮组之间增加了SL06型转矩传感器,该传感器可通过外接显示屏直接输出转速与转矩的数值.为验证制动转矩的平稳性,在制动电机输出轴上设置了一根直径0.8 mm、长100 mm的钢丝摆针,若制动转矩平稳,则力矩平衡条件下的转速必然恒定,摆针不会发生震颤;否则摆针将发生震颤,通过目测即可观察.
为避开电机磁材料的饱和区域,并考虑发热等因素,将相电流的最大值设定为5 A.经实测,该条件下最大静态锁定转矩为8.5 N·m.实验中,分别使动力电机的功率为1、5和10W,在制动电机相电流在1.4~5 A之间变化时,记录稳定之后的转矩和转速数值.

图6 不同功率下制动电机的相电流-转矩-转速关系Fig.6 Relationship between phase current and torque,rotational speed of the motor brakestaff with different powers
将实验所得数据绘制成图,如图6(a)~(c)所示.对比图6的结果曲线可发现,3个子图中的相电流幅值-转矩的规律基本不变,然而动力电机功率越大,相同相电流下的转速越高,可见制动转矩仅与相电流有关,而与转速无关.在实验中通过真空罐的玻璃窗口观察钢丝摆针的震颤情况,发现仅当对动力电机功率进行调节的瞬间,摆针出现震颤;当转矩平衡后,未观察到摆针震颤,说明转矩平稳性良好(均在低速条件下观察).
以上实验结果说明,基于磁阻式步进电机的恒定制动转矩负载能够满足空间齿轮寿命实验的要求,达到了设计目的.
5 结束语
通过相电流细分方法,在磁阻式步进电机内部构造出大小恒定旋转磁场,并借助转子位置和转速传感器,使转子和旋转磁场严格保持π/2相位差,从而使电机在旋转状态下输出平稳可调的静态锁定转矩.研制了恒转矩负载,搭建了实验系统.实验结果表明:在转速1~160 r/min范围内,该恒转矩负载可提供0.65~8.43 N·m的平稳可调制动转矩,有效解决了传统电机制动器存在的转矩不平稳、转矩与转速有关的问题.
[1]张勇,陈会平.空间机构摩擦副表面冷焊特性数值分析[J].华南理工大学学报:自然科学版,2007,35(3):53-55.ZHANG Yong,CHEN Huiping.Numerical analysis of coldwelding characteristics of friction pairs in space mechanism[J].Journal of South China University of Technology:Natural Science Edition,2007,35(3):53-55.
[2]KRANTZ T L,KAHRAMAN A.An experimental investigation of the influence of the lubricant viscosity and additives on gear wear[R].NASA,Cleveland,Ohio,2005.
[3]宋宝玉,古乐,张峰,等.SY-1型真空摩擦磨损试验机的研制[J].润滑与密封,2004(1):61-62.SONG Baoyu,GU Le,ZHANG Feng,et al.Developmet of SY-1 friction and wear vacuum tester[J].Lubrication Engineering,2004(1):61-62.
[4]GAY S E,EHSANIM.Optimized design of an integrated eddy-current and friction brake for automotive applications[C]//IEEE Conference on Vehicle Power and Propulsion,2005.Chicago,USA,2005:290-294.
[5]CHEN D C,ZHANG H,WANG M F.An intelligent tension control system in strip unwinding process[C]//IEEE International Conference on Control and Automation,2007.Guangzhou,China,2007:342-345.
[6]任国海,陈琢,杜鹏英,等.磁粉制动器对异步电动机机械特性的测量[J].电机与控制学报,2006,10(3):275-277.REN Guohai,CHEN Zuo,DU Pengying,et al.Measurement for mechanical characteristics of asynchronous motors using electromagnetic brake[J].Electric Machines and Control,2006,10(3):275-277.
[7]张青,朱刚恒.磁粉制动器的滑差功率研究[J].烟台大学学报:自然科学与工程版,1995,8(1):40-44.ZHANG Qing,ZHU Gangheng.Research of slip power for MPB[J].Journal of Yantai University:Natural Science and Engineering,1995,8(1):40-44.
[8]钱华明,袁赣南.智能化航迹仪的步进电机变速控制技术及间隙补偿的研究[J].哈尔滨工程大学学报,1997,18(6):91-96.QIAN Huaming,YUAN Gannan.Study of stepping motor control and clearance compensation in intelligent navigation plotter[J].Journal of Harbin Engineering University,1997,18(6):91-96.
[9]SAHOO N C,XU J X,PANDA S K.Low torque ripple control of switched reluctance motors using iterative learning[J].IEEE Transactions on Energy Conversion,2001,16(4):318-326.
[10]SARGOS F M,ZASKALICKY P,GUDEFIN E J.Structures theory of reluctance step motors[J].Industry Applications Magazine,1995,1(3):28-32.
[11]MORIMOTO S,TAKEDA Y,HIRASA T.Current phase control methods for permanent magnet synchronous motors[J].IEEE Transactions on Power Electronics,1990,5(2):133-139.
[12]FREITASM A A,ANDRADE D A,BORGEST T,et al.Driving the step motor with controlled phase currents[C]//1998 International Conference on Power Electronic Drives and Energy Systems for Industrial Growth.Perth,Australia,1998:493-498.
[13]KANG DW,KIMW H,GO SC,etal.Method of current compensation for reducing error of holding torque of permanent-magnet spherical wheel motor[J].IEEE Transactions on Magnetics,2009,45(6):2819-2822.
