基于汽车自动会灯器的设计
2012-10-18宋佐龙李月娥
宋佐龙,李月娥
(1.中国海洋大学,山东 青岛 266000;2.潍坊科技学院,山东 寿光 262700;3.寿光市北洛中心小学,山东 寿光 262700)
1 引言
在夜间行车时两车相对行驶时,对面车强远灯光由于炫目使驾驶员在短时间内看不清路况,这样往往会导致交通事故的发生,虽然有多种会灯控制器,但在使用中往往不能达到完全消除炫目的目的。本设计通过单片机控制一偏振片使其始终处在对面车灯与驾驶员眼睛的直线上,利用偏振片对光线的 1/2的遮挡作用减小对面车灯光的强度,从而达到清除炫目的目的。
2 整体结构
图1为整体结构图,本汽车自动会灯控制器包括单片机控制器、安装在单片机控制器前面板上的超声波传感器、固定在汽车前窗边缘的螺纹杆、驱动电机、偏振片驱动电机、透明基带、偏振片和光传感器组成。
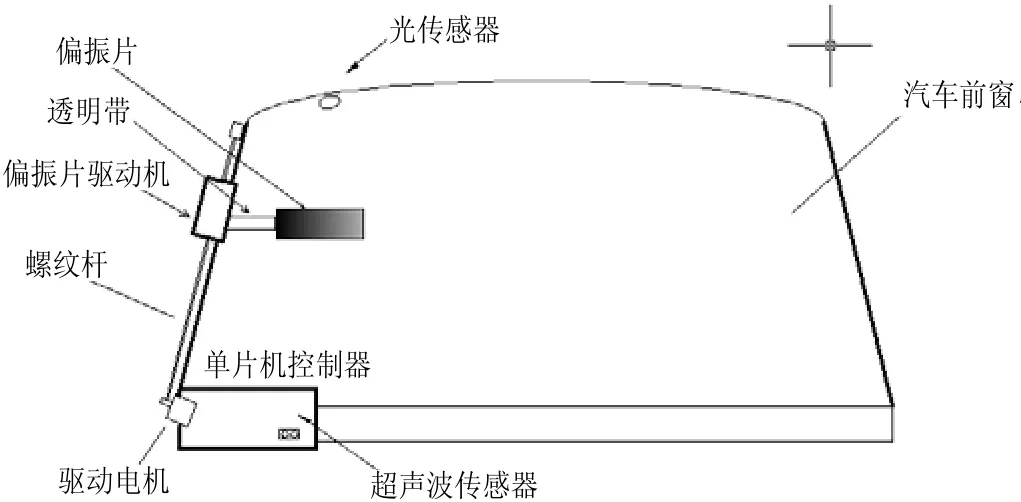
图1 整体结构图
3 工作过程
本会灯控制器工作过程:当夜间行车打开车灯时本会灯控制器同时打开工作,首先超声波传感器在电机 M3带动下进行上下转动两次扫描人体,把人体头部最高点距离记录下来作为人眼睛位置的参考点,通过单片机计算后输出控制信号驱动偏振片电机控制偏振片的上下移动,根据驾驶员的身高确定偏振片的高度位置,在行车过程中如果驾驶员头部前后移动时该系统也会对偏振片的高度作出跟踪调整。行车时如果前面有相对过来的汽车车灯光线被光传感器接收当光线亮度达到控制的阀值时单片机根据车灯在光传感器中成像的位置输出控制信号,控制偏振片驱动电机,通过控制偏振片驱动电机驱动偏振片左右移动,使偏振片处于对面车灯、驾驶员眼睛的一条直线上。处在直线上的偏振片会遮挡对面车灯的一半光线,达到减弱炫目的目的。
3.1 光传感器结构
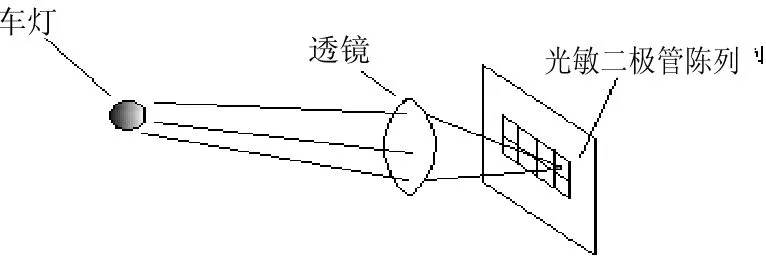
图2 光传感器结构
图2 是光传感器结构图,它放在一个圆柱形结构封闭壳体内,其结构包括透镜、光敏二极管阵列,光敏二极管阵列由二排直线排列的8只光敏二极管组成。8只二极管处在透镜焦距处的一块小平面板上,两车相遇时对面车灯成的像会落在光敏二极管上。当两车会灯时随着两车距离会越来越近,对面车灯的成像点位置会发生变化,像点处的会光敏二极管接受到强光电流增加,将这一信号输入给单片机,单片机根据光敏二极管输入的信号判断对面车的位置,然后控制偏振片电机调节偏振片的位置,使对面车灯、偏振片和驾驶员的眼睛处在一条直线上,达到减弱直射到驾驶员眼睛的光线,减少强光对驾驶员的影响。
3.2 单片机电路结构
本控制器采用了 89C51单片机,P1口接光敏元件,P0口驱动电机和偏振片驱动电机,驱动电机和偏振片驱动电机采用了步进电机,单片机38、39两脚分别输出两路信号,这两个信号用来控制驱动电机M1,38脚信号经反相器74LS04后得到两个极性相反的信号分别输入驱动芯片L239的2、7脚,经L239后从3、6脚接M1的A相绕组。39脚信号经反相器74LS04后得到两个极性相反的信号分别输入驱动芯片L239的10、15脚,经L239后从11、14脚接M1的B相绕组。单片机36、37两脚分别输出两路信号,这两个信号用来控制偏振片驱动电机M2,36脚信号经反相器 74LS04后得到两个极性相反的信号分别输入驱动芯片L239的10、15脚,经L239后从11、14脚接M2的A相绕组。39脚信号经反相器74LS04后得到两个极性相反的信号分别输入驱动芯片L239的3、6脚,经L239后从10、5脚接M2的B相绕组。芯片L239需要两路电源供电图中VCC是5 V供电电源,L239的9脚采用了12 V电源。
4 结束语
这种汽车自动会灯控制器用光传感器的检测对面行车灯位置,以单片机为控制核心实现偏振片的自动跟踪,消除了会灯时的炫目对驾驶员的影响。通过制作能够达到预期的效果,有一定的应用价值。
[1]马争.微计算机与单片机原理及应用[M].北京:高等教育出版社,2009.8.
